

лекции, учебные пособия / учебное пособие компьютерные лабораторные работы по динамике. мельников в. г., иванов с.е., мельников г. и. / pri_meh_method_complabrabpodin
.pdfОбобщенной силой нестационарной голономной одностепенной
механической системы называется отношение виртуальной мощности системы сил (мощности системы сил на виртуальных скоростях) к обобщенной скорости:
Q = P |
* |
& |
* |
|
|
|
|
* |
(1.50) |
|
|||||||||
|
|
|
|||||||
|
/ q, при P = ∑Fi |
(vi , ri ,t) vi |
+ ∑M j ω j |
|
|||||
В общем случае Q есть функция трех параметров: Q =Q(q&, q,t). В (1.50) силы зависят от действительных (не виртуальных) скоростей. Уравнение Лагранжа для нестационарной одностепенной системы имеет такой же вид, как и для стационарной системы:
d |
∂T |
|
|
∂T |
−Q = 0 |
(1.51) |
|
|
|
& |
|
− |
∂q |
, |
|
|
|||||||
dt |
∂q |
|
|
|
|||
т.е. полная производная по времени от обобщенного импульса ∂T ∂q&, уменьшенная на величину ∂T
∂q&, уменьшенная на величину ∂T ∂q равна обобщенной силе системы
∂q равна обобщенной силе системы
приложенных сил, определяемой по формуле (1.50) через мощность реальных сил на виртуальных скоростях.
Выполнив процедуры дифференцирования трехчленного выражения кинетической энергии (1.48), указанные в уравнении (1.51), получим окончательно динамическое уравнение в форме ОДУ второго порядка вида:
&& |
|
1 |
&2 ∂a2 |
& |
∂a2 |
|
∂a1 |
|
∂a0 |
|
|
(1.52) |
|
+b |
|
+ |
− |
−Q |
= 0 |
, |
|||||||
q |
2 |
q |
∂q |
+ q |
∂t |
∂q |
|||||||
|
|
|
|
∂t |
|
|
|
|
|
||||
|
|
|
при ak |
= ak (q,t), |
k = 0,1,2, b = a2−1 |
|
|
|
|
|||||||
|
К закону динамики нестационарной механической системы вида |
|||||||||||||||
(1.52) присоединяют начальные условия, начальную фазу движения |
(1.53) |
|||||||||||||||
|
|
q(0) = q0 , q(0) = q0 или [q(0), q(0)] =[q0 , q0 ] |
|
|
|
|||||||||||
|
|
& |
|
& |
|
|
|
|
|
& |
|
& |
|
|
|
|
|
Математическую модель движения рассматриваемой механической |
|||||||||||||||
системы (1.52)-(1.53), можно записать в нормальной форме Коши: |
(1.54) |
|||||||||||||||
& |
|
∂a0 |
|
∂a1 |
|
∂a2 |
|
1 |
|
2 ∂a2 |
|
& |
* |
|
−1 |
|
u = b Q + |
∂q |
− |
∂t |
−u |
∂t |
− |
|
u |
∂q |
|
, q = u, при Q = P |
|
/ u, |
b = a2 |
|
|
2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
u(0) =u0 , q(0) = q0 |
|
|
|
(1.55) |
||||||
Начальные условия не задают в случае, когда требуется найти установившийся периодический режим колебаний, тогда их заменяют требованием периодичности искомого частного решения.
21

Пример. Электродвигатель с вращающимся кривошипом.
Рис. 1 Вибрация подпружиненного электродвигателя с вращающимся кривошипом
Электродвигатель массой m1 , включающий массу корпуса, платформы
и четырех направляющих колес, установлен на пружинах общей жесткости с2 , с массой пружин m2 . Радиусы инерции каждого из четырех
направляющих колес i3 , радиусы колес r3 , масса колес m3 . На оси О двигателя установлен неуравновешенный маховик массой m4 с расстоянием до центра масс r4 , радиус инерции маховика относительно
оси О равен i4 , маховик равномерно вращается согласно кинематическому уравнению φ= ω4 t , при ω4=2. Задан общий момент вязкого трения на осях M3= b3 ω3 . Составить динамическое уравнение устройства.
Решение Уравнением ϕ= ω4t =2t задана нестационарная связь.
Пружины не создают связей, они лишь создают силы и имеют инерционность, которую согласно методу Рэлея учтем, прибавив к массе m1 двигателя третью часть массы пружин m2 . Имеем нестационарную
механическую систему с одной степенью свободы, в которой за обобщенную координату примем направленное вверх смещение от положения оси О, соответствующего недеформированному состоянию пружины.
& |
На рис.1 показано |
|
Фазовый вектор системы: V=[v,y] при v = y . |
||
положительное кинематическое состояние системы, |
когда v>0 , |
y>0 . |
Получим динамическое уравнение. Выразим силы |
и скорости |
через |
фазовые координаты v , y . Имеем: |
|
|
22

ω |
|
= |
v |
, |
v |
= v +v |
при v |
=ω r |
|
|
|
|
|
|
|||||||||
3 |
, v = vj |
, v |
OC, |
||||||||||||||||||||
|
|||||||||||||||||||||||
|
|
r3 |
|
|
C |
CO |
|
|
CO |
4 4 |
|
|
|
|
CO |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.56) |
||
ω |
3 =ω3k , F2 = −c2 y j , |
M3 = −b3ω3 k = −(b3v / r3 )k , |
|||||||||||||||||||||
|
|||||||||||||||||||||||
G1 = −m1g j , G4 = −m4 g j
Кинетическая энергия устройства состоит из кинетической энергии его поступательного движения со скоростью v , вращения четырех колес вокруг их центров масс и энергии маховика со смещенным от оси центром масс:
|
+ |
1 |
m2 |
|
2 |
2 |
2 |
2 |
+ m4 (v |
2 |
2 |
2 |
) |
2T = m1 |
3 |
+ 4m3 v |
|
+ 4m3i3 v |
|
/ r3 |
|
+ 2v vCO +i4ω4 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
где v vCO = −vω4r4 sin(ω4t) .
Отсюда получаем кинетическую энергию в форме квадратного полинома относительно v :
|
|
|
T = |
1 a v2 + a v + a |
, |
|
|
|
(1.57) |
||||
при обозначениях |
|
|
2 |
|
2 |
1 |
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
(1.58) |
||
a2 = m1 + m2 / 3 + 4m3 + 4J3 / r32 + m4 , |
|
|
h4 = m4r4ω4 , |
||||||||||
a = −h sin(ω |
t), |
a |
|
= m i2ω2 |
/ 2, |
ω |
4 |
= const |
|
||||
1 |
4 |
4 |
|
0 |
|
4 4 |
4 |
|
|
|
|
|
|
Частные производные от коэффициентов, входящие в (1.52) |
(1.59) |
||||||||||||
∂a2 |
= 0, |
∂a1 |
= −h ω |
4 |
cos(ω |
t), |
∂a2 |
= 0, ∂a0 = 0 |
|||||
∂y |
|
∂t |
4 |
4 |
|
|
∂t |
|
|
∂y |
|
||
|
|
|
|
|
|
|
|
|
|
||||
Обобщенная сила Q по обобщенной скорости v = y& находится через вычисление виртуальной мощности системы всех приложенных сил на виртуальных скоростях точек приложения сил. При этом в выражениях сил зависящих от скоростей не следует заменять действительные скорости на виртуальные. Не принимаем во внимание крутящий момент электродвигателя вместе с моментом трения в подшипнике O , осуществляющих нестационарную связь – программное движение кривошипа, поскольку их мощность на виртуальном движении при фиксированном в связях параметре t (т.е. при ϕ = const ) равна нулю.
Мощность силы G4 подсчитываем на виртуальной скорости vC* = v . Центр
масс пружин амортизатора имеет скорость v / 2 . Имеем:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P* =G |
V |
+G V / 2 +G V + F V +4M |
3 |
ω |
3 |
= −(G +G / 2 +G + F + 4M |
3 |
/ r )V |
|||||||||||||||||||||||
1 |
2 |
|
|
4 |
2 |
|
|
|
|
|
|
1 |
2 |
4 |
2 |
4 |
|
|
|||||||||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
b3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
(1.60) |
||||||
|
|
|
* |
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
Q = P |
/ v = − |
y +c2 y +G1 +G2 / 2 +G4 |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
r3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя в уравнение Лагранжа (1.52) выражения (1.59),(1.60) получаем динамическое уравнение устройства:
23

&& |
|
b3 |
& |
|
|
|
|
−1 |
|
+G2 |
/ 2 +G4 |
−h4ω4 cos(2t) |
= 0, |
b = a2 |
|||
y |
+b |
r3 |
y +c2 y +G1 |
|||||
|
|
|
|
|
|
|
|
Окончательно имеем линейное неоднородное ОДУ второго порядка с постоянно действующими периодическими возмущениями следующей
структуры: |
|
|
2 |
y +h0 |
−h cos( pt) = 0, 0 ≤ n < k |
(1.61) |
&& |
& |
|
||||
y + |
2ny +k |
|
|
|||
при обозначениях |
|
|
|
|
|
|
n =b /(2r3a2 ), |
k = c2 / a2 , h0 = (G1 +G2 / 2 +G4 ) / a2 , |
h = h4ω4 / a2 |
||||
Общее решение уравнения (1.61) состоит из частного периодического решения, имеющего гармоническую и постоянную составляющие, и общего решения однородного уравнения с двумя константами С и β :
y = H cos( pt − |
α) − h0 / k |
2 |
+Ce |
−nt |
cos(k1t − β), k1 = k |
2 |
− n |
2 |
(1.62) |
||||||
|
|
|
|
|
|||||||||||
H = |
|
h |
|
, |
cos(α) = h−1H |
(k2 − p2 ) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
(1.63) |
||||||||
|
(k2 − p2 )2 + 4n2 p2 |
|
|
|
|
|
|
|
|
|
|
||||
Константы |
С |
и β |
|
определяются |
через начальные |
условия |
|||||||||
y(0) = y0 , y(0) = v0 y |
посредством подстановки их в общее решение (1.62) и |
||||||||||||||
& |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в производную от него. |
|
|
|
|
|
|
|
|
|
|
|
||||
Согласно |
уравнению (1.62) |
|
система |
совершает |
|
|
двухчастотные |
||||||||
колебания около |
положения |
y = −h / k2 с |
собственной |
|
циклической |
||||||||||
частотой k1 и вынужденной частотой p . При этом амплитуда собственных
колебаний уменьшатся по показательному закону e−nt с коэффициентом затухания n , обусловленным вязким трением. В результате любое движение системы асимптотически приближается к одночастотному колебанию, не зависящему от начальных условий, подчиненному уравнению:
y = H cos( pt −α) + yСТ при yСТ = −h0 / k2 |
(1.64) |
Иными словами, система совершает гармонические колебания согласно формуле (1.64), асимптотически устойчивые относительно начальных возмущений в том смысле, что любой переходный процесс, начинающийся
с состояния |
y(0) = y0 |
, y(0) = v0 , асимптотически переходит |
в |
|
|
& |
|
периодические колебания относительно статического положения y = yСТ |
с |
||
постоянной амплитудой H , с частотой, равной частоте возмущающей силы и с фазой, смещенной на величину α от фазы кинематического возмущения.
Замечание В случае нестационарной одностепенной механической
системы уравнение Лагранжа и |
уравнение энергии T& = P |
приводят |
к |
различным дифференциальным |
уравнениям. В данном |
примере |
из |
уравнения T& = P получается дифференциальное уравнение, содержащее мощность крутящего момента. Такое уравнение можно использовать для
24
вычисления крутящего момента, обеспечивающего выполнение нестационарной связи, но прежде следует применить уравнение Лагранжа и получить решение (1.64).
Замечание Имеется другой способ решения одностепенной нестационарной задачи. Можно обобщенную координату q переобозначить q1 и в уравнении нестационарных связей время t переобозначить q2 , вводя
условно дополнительную координату, дополнительную степень свободы. Получаем стационарную двухстепенную механическую систему для которой составляем два уравнения Лагранжа. Затем в этих уравнениях полагаем q2 =t , первое из уравнений есть искомое ОДУ, второе можно
отбросить или использовать для реакций нестационарных связей. В рассмотренном примере в качестве q2 можно принять угол поворота кривошипа и в конце принять q2 =ω4t
25

ЛАБОРАТОРНАЯ РАБОТА №1
ОПРЕДЕЛЕНИЕ КИНЕТИЧЕСКОЙ ЭНЕРГИИ МНОГОЗВЕННОГО МЕХАНИЗМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
В работе определяется и исследуется кинетическая энергия механической системы с двумя степенями свободы, совершающей вынужденные колебания в условиях периодических возмущений создаваемых электроприводом при заданном начальном состоянии системы. Механизм представляет собой поступательно движущуюся платформу, на которой размещены три уравновешенных вращающихся колеса и физический маятник, состоящий из двух элементов с известными положениями центров масс.
Цель работы
Определение кинетической энергии многозвенного механизма с двумя степенями свободы по экспериментальным данным и расчетным формулам в виде однородной квадратичной формы относительно обобщенных скоростей с постоянными и зависимыми от обобщенных координат коэффициентами, и составление матрицы инерции механизма.
1. Описание установки
Рис.1.1. Окно виртуальной лабораторной установки
26
Изменяемые начальные параметры механической системы:
•m11,m12 ,m21,m22 −массы соответствующих звеньев, остальные звенья установки считаются невесомыми
•k1,k2 − коэффициент жесткости верхней и нижней пружины
•k3 − коэффициент вязкого трения в демпфере
•k4 , k5 − коэффициенты вязкого трения в подшипниках каждого колеса и в подшипниках маятника
•i2 −радиус инерции диска маятника, с увеличением радиуса инерции увеличиваются геометрические размеры диска
•r3 −радиус эксцентрика электродвигателя
•r −расстояние от оси подвеса маятника до центра диска массой
• |
x(0), x(0),ϕ(0),ϕ(0) −заданные начальные значения, фазовых |
|
|
& |
& |
координат механической системы
•Неизменяемые параметры механической системы:
•r1 ,i1 − радиус и радиус инерции каждого колеса платформы, их значения фиксированы и составляют r1 = 0.6 , i1 = 0.424
•l −длина стержня маятника, звено является однородным тонким стержнем, значение параметра фиксировано и равно l = 6.48
Параметры моделирования:
n − шаг дискретизации, этот параметр влияет на скорость и
погрешность моделирования механической системы, большой шаг дискретизации ускоряет моделирование, но приводит к неточным результатам.
27
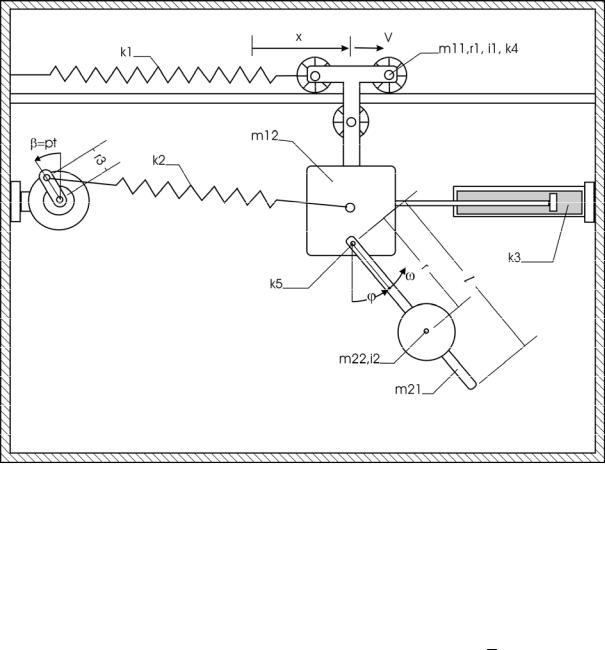
Рис. 1.2. Параметры системы с двумя степенями свободы
2. Математическая модель
Общая трехчленная формула для двойной кинетической энергии
плоского движения тела имеет вид
2T = mv2 |
+ J |
|
ω2 + 2mv |
|
v |
|
, |
v =ω OC, |
v OC, |
|
|
|
|
|
oz |
o |
co |
v =ω |
×OC , |
(1.1) |
|||||||||
o |
|
|
|
|
co |
co |
co |
|
||||||
где vo - скорость полюса тела, OC - расстояние от полюса O до центра массы С,Oz – ось вращения, Joz - момент инерции тела относительно оси, проведенной через полюс перпендикулярно плоскости движения, vco -
относительная скорость вращения центра масс тела С вокруг полюса O .
vo vco =vo vcocos(vo vco )
В случае, когда за полюс принят центр масс тела, получаем из (1.1) двухчленную формулу:
2T = mv2 |
+ J |
сz |
ω2 |
(1.2) |
с |
|
|
|
28
Кинетическая энергия механической системы равна сумме кинетических энергий всех ее звеньев:
|
T =3T11 +T12 +T2 |
при T2 =T21 +T22 |
(1.3) |
Здесь |
|
|
|
T11 |
- кинетическая энергия каждого из трех колес массы m12 |
|
|
T12 |
- кинетическая энергия платформы массой m12 |
|
|
T21 |
- кинетическая энергия |
стержня маятника массой |
m21 |
совершающего плоское движение
T22 - кинетическая энергия диска массой m22 , совершающего плоское
движение
T2 - кинетическая энергия маятника, состоящего из стержня и диска.
T2 =T21 +T22 |
(1.4) |
При обозначении (1.4), окончательная формула (1.3) принимает вид кинетической энергии механической системы:
T =3T11 +T12 +T2 |
(1.5) |
2.1. Кинетическая энергия платформы и колес
Двойная кинетическая энергия платформы, движущейся поступательно определяется формулой
2T |
= m v2 |
(1.6) |
12 |
12 |
|
Кинетическая энергия трех колес с общей массой 3m11 , совершающих
плоское движение состоит из кинетической энергии поступательного движения вместе с полюсом О и кинетической энергии вращения вокруг О в поступательной системе отсчета
T11 = |
3 |
(m11v2 |
+ Jcω2 ), |
при Jc = m11i12 , |
ω = v / r1 |
||||||
или, |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
i2 |
|
2 |
|
|
|
|
T11 = |
|
m11 |
1 |
+ |
1 |
v |
|
(1.7) |
|
|
|
2 |
2 |
|
||||||
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||
Коэффициент инерции системы трех колес, приведенный к скорости
a11 =3m11(1+i12 / r12 )
2.2.Кинетическая энергия маятника
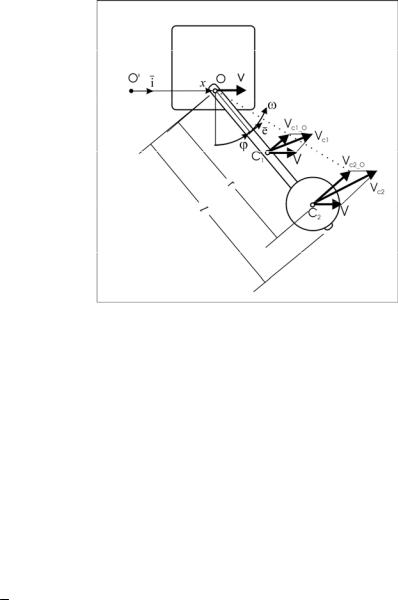
В данном механизме маятник совершает плоское движение. Найдем его кинетическую энергию T2 двумя способами.
29
Первый способ
Из выражения (1.2) следует, что кинетическая энергия маятника (Рис.6) состоит из энергии стержня и диска, совершающих плоское движение, из четырех слагаемых,
|
2T = m v2 |
+ J стω2 + m v2 |
+ J дискω2 , |
(1.8) |
||
|
2 |
21 С1 |
С1 |
22 С2 |
С2 |
|
где vC1 - |
скорость центра масс C1 |
стержня, |
vС2 - скорость центра масс |
|||
C2 диска, |
JСст1 и JСдиск2 |
- моменты инерции стержня и диска относительно |
||||
их центральных осей, перпендикулярных плоскости движения.
Рис. 1.3. Маятник
Скорости центров масс находятся как векторные суммы скорости
полюса и относительной скорости движения вокруг полюса:
vC1 = v + vC1_ O , |
vC 2 = v + vC 2 _ O |
||
v = x |
|
, |
|
i |
|
||
& |
|
|
|
(1.9) |
|||
vC1_ O = vC1_ O e, |
vC 2 _ O = vC 2 _ O e |
||
e OC1
(1.10)
Здесь i -орт линейной координаты x , e - сопровождающий касательный орт угловой координаты ϕ направленный против часовой стрелки, O -
точка подвеса маятника, v - скорость точки O , равная скорости платформы, vC1_ O и vC 2 _ O - относительные скорости вращения центров
масс стержня и диска маятника вокруг точки подвеса O , vC1_ O и vC 2 _ O -
30