

16.Два типа электронных вычислительных машин
16.1.Аналоговая вычислительная машина (авм)
Следует подчеркнуть, что борьба против цифровых вычислительных машин, которые американцы называли компьютерами и которые несли "идеологическую заразу" в наше Социалистическое общество осуществлялась не только идеологами Политбюро и их придворными философами. Многие ученые также были против использования в нашей стране цифровой вычислительной техники. Они считали, что будущее за электронными аналоговыми вычислительными машинами, которые в сороковые – пятидесятые годы XX столетия успешно решали задачи математической физики, а также задачи управления сложными объектами.
Электронная аналоговая вычислительная машина (ЭАВМ), вычислительная машина, в которой каждому мгновенному значению переменной величины, участвующей в исходных соотношениях, ставится в соответствие мгновенное значение электрической величины (напряжения или тока), которое отличается от исходной физической величины масштабным коэффициентом.
По сути дела, аналоговые вычислительные машины являются аналоговыми моделями. Напомним, что аналоговая модель и ее реальный прототип реализованы на различных физических принципах, но поведение обоих описывается одними и теми же алгебраическими (дифференциальными) уравнениями. Таким образом, экспериментируя с моделью, можно интерпретировать полученные результаты применительно к реальному прототипу.
Хронология событий. Первая механическая аналоговая вычислительная машина для решения дифференциальных уравнений при проектировании кораблей была построена А. Н. Крыловым в 1904. В основу её была положена идея интеграфа — аналогового интегрирующего прибора, разработанного польским математиком Абданк-Абакановичем (1878) для получения интеграла произвольной функции, вычерченной на плоском графике.
Дальнейшее развитие механических интегрирующих машин связано с работами американского учёного В. Буша, под руководством которого была создана чисто механическая интегрирующая машина (1931), а затем её электромеханический. вариант (1942). В 1936 русский инженер Н. Минорский предложил идею электродинамического аналога. Толчок развитию современных АВМ постоянного тока дала разработка Б. Расселом (1942—44, США) решающего усилителя.
Большое значение имели работы советского математика С. А. Гершгорина (1927), заложившие основы построения сеточных моделей. В 1936 в СССР под руководством И. С. Брука были построены механический интегратор и электрический расчётный стол для определения стационарных режимов энергетических систем. В 40-х гг. была начата разработка электромеханического пункта управления зенитным артиллерийским огнем (ПУАЗО) на переменном токе и первых электронных ламповых интеграторов (Л. И. Гутенмахер). Работы, проведённые под руководством Гутенмахера (1945—46), привели к созданию первых электронных аналоговых машин с повторением решения. В 1949 в СССР под руководством В. Б. Ушакова, В. А. Трапезникова, В. А. Котельникова, С. А. Лебедева был построен ряд АВМ на постоянном токе. Эти работы положили начало развитию современной аналоговой вычислительной техники в СССР.
В 1960-х годах электронные аналоговые компьютеры имели невероятный успех, и являлись повседневным инструментом ученых для решения множества специфических задач в различных областях науки. В СССР расцвет электронных аналоговых вычислительных машин с их серийным выпуском пришёлся на 1960-70-е годы.
Что же представляет собой электронная аналоговая вычислительная машина.
Базовым линейным решающим блоком электронных АВМ является операционный усилитель (ОУ). Операционный усилитель представляет собой усилитель постоянного тока (УПТ) с большим коэффициентом усиления, охваченный глубокой отрицательной обратной связью (рис.54).
Рис. 54. Схема операционного усилителя (z – электрическое сопротивление резистора или импеданс конденсатора)
С помощью различных комбинаций электрических емкостей и резисторов на входе усилителя и в цепи его обратной связи можно реализовать различные математические операции над непрерывными величинами, представленными в виде напряжений постоянного тока:
Операция |
Схема включения |
Выражение для Uвых |
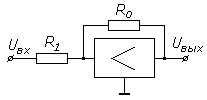
Умножение на постоянный коэффициент |
|
Uвых = (R0 / R1) Uвх |
Инвертирование |
См. предыдущую строку при R1 = R0 |
Uвых = U вх |
Алгебраическое суммирование |
|
Uвых = Uвхi |
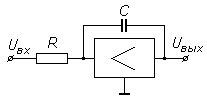
Интегрирование |
|
Uвых = - (1/RC) ∫ Uвх |
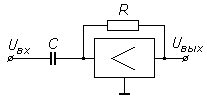
Дифференцирование |
|
Uвых = CR dUвх/dt |

В общем виде ЭАВМ может быть представлена структурной схемой рис. 55. Решающие блоки – основные блоки машины, осуществляющие выполнение математических операций над машинными переменными. Измерительные приборы – используются для измерения вводимых исходных величин и результатов решения. Система питания обеспечивает все необходимые напряжения для питания решающих блоков и других устройств машины. Система управления объединяет все блоки машины в единое натуральное и обеспечивает их функционирование и управление ими.

555. Структурная схема электронной аналоговой вычислительной машины
ЭАВМ являет собой набор блоков (решающих элементов), которые достаточно простым способом соединяются в те или иные электрические схемы. Методика использования ЭАВМ позволяет по заданной системе уравнений соединить решающие элементы таким образом, чтобы получившаяся электрическая схема описывалась той же самой системой уравнений.
Существенно, что для решения каждой конкретной задачи решающие блоки соединяются специфическим образом. Пусть имеется дифференциальное уравнение:
 ()
()
При решении уравнений методом понижения порядка производной исходное уравнение разрешается относительно старшей производной.
Далее схема строится, исходя из следующих предположений. Пусть имеется третья производная, тогда, последовательно интегрируя ее, можно получить вторую производную, первую производную и искомую функцию. Умножив каждую компоненту на соответствующий коэффициент и изменив, где надо, знаки, можно получить все компоненты правой части уравнения. Теперь остается подать их на вход первого интегратора с суммированием и получить окончательно схему для решения рассматриваемого уравнения (), которая показана на рис.56.
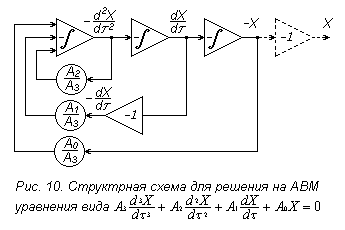
Рис. 56. Структурная схема ЭАВМ для решения уравнения ()
ЭАВМ в основном применялись при решении следующих задач.
Контроль и управление. В системах автоматического управления АВМ пользуются, как правило, для определения или формирования закона управления, для вычисления сводных параметров процесса (кпд, мощность, производительность и др.). Если задано математическое выражение, определяющее связь сводного параметра или управляющего воздействия с координатами объекта, ЭАВМ осуществляет решение соответствующего уравнения. Результат вычислений поступает либо на исполнительный механизм (замкнутая система), либо к оператору. В последнем случае АВМ работает как информационное устройство. Например, ЭАВМ были широко распространены для оценки экономической эффективности энергетических систем, и те же ЭАВМ могли управлять исполнительными механизмами, т. е. служить автоматическими регуляторами.
Опережающий анализ, основанный на быстродействии. Многократно решая систему уравнений, описывающих управляемый процесс, учитывая его текущие характеристики, ЭАВМ за короткое время «просматривает» большое число вариантов решений, отличающихся значениями параметров, подлежащих изменению при управлении процессом. Намного опережая ход процесса, АВМ прогнозирует сигналы управления, которые могут обеспечить необходимое качество протекания процесса. Найденные машиной значения передаются на регулирующие устройства, например в виде положений их уставок, после чего поиск наилучшего варианта продолжается. В режиме опережающего анализа АВМ выполняют функции либо машин-советчиков, когда оператор пользуется результатами полученных на машине расчётов для ручного или полуавтоматического управления, либо управляющих машин, автоматически учитывающих текущие характеристики процесса и управляющих им по оптимальным показателям. Выбор наилучшего режима технологического процесса осуществляется также самонастраивающимися математическими машинами в режиме опережающего анализа.
Экспериментальное исследование поведения системы с аппаратурой управления или регулирования в лабораторных условиях. С помощью ЭАВМ воспроизводилась та часть системы, которая по каким-либо причинам не могла быть воспроизведена в лабораторных условиях. Связь АВМ с аппаратурой управления или регулирования в основном осуществляется преобразующими устройствами, в которых машинные переменные изменялись по масштабу и форме представления.
Анализ динамики систем управления или регулирования. Заданные уравнения объекта решались в выбранном масштабе времени с целью нахождения основных параметров, обеспечивающих требуемое протекание процесса. Особо важны были быстродействующие ЭАВМ, с помощью которых в ускоренном масштабе времени можно было решить некоторые итеративные задачи, задачи оптимизации, а также реализовать метод Монте-Карло, требующий многократного решения стохастических дифференциальных уравнений.
Решение задач синтеза систем управления и регулирования сводился к подбору по заданным техническим условиям структуры изменяемой части системы, функциональных зависимостей требуемого вида и значений основных параметров. Окончательный результат получался многократным повторением решения и сопоставлением его с принятым критерием близости.
Решение задач по определению возмущений или полезных сигналов, действующих на систему. В этом случае по дифференциальным уравнениям, описывающим динамическую систему, по значениям начальных условий, известному из эксперимента характеру изменения выходной координаты и статистическим характеристикам шумов в измеряемом сигнале определялось значение возмущения или полезного сигнала на входе.
Основные технические характеристики некоторых типов электронных АВМ общего назначения, выпускаемых серийно в СССР, даны в таблице. Первые пять типов установок — портативные малогабаритные настольные устройства позволяют решать также и нелинейные задачи, имеют ограниченный фиксированный состав решающих элементов, что ограничивает её применение. Установки-МН-8, МН-14, МН-17, ЭМУ-10 — многосекционные, рассчитанные на решение сложных задач.
Тип установки |
Вид дифференциальных уравнений, решаемых на установке |
Макс. порядок дифференциальных уравнений или число уравнений 1-го порядка в системе |
Допустимая длительность решения (сек) |
ИПТ-5 |
Линейные с постоянными и переменными коэффициентами |
9 |
150 |
ЛМУ-1 |
Линейные с постоянными и переменными коэффициентами с типичными нелинейностями |
6—9 |
200—400 |
МН-7 |
Линейные и нелинейные с небольшим числом нелинейных операций |
6 |
200 |
ЭМУ-8 |
Линейные и нелинейные |
Набор из стандартных блоков, каждый предназначен для решения уравнений 2-го порядка |
2000 |
МН-11 |
Линейные и нелинейные с автоматическим поиском решения по заданному критерию |
6—9 |
Частота повторений решения 100реш/сек |
МН-8 |
Линейные и нелинейные с большим числом переменных коэффициентов и нелинейных решающих элементов |
32 |
1800 |
МН-14 |
Линейные и нелинейные с большим числом нелинейных решающих элементов |
30 |
10000 |
ЭМУ-10 |
Линейные и нелинейные с переменным запаздыванием. Решение задач автоматической оптимизации |
24 |
2000 |
МН-17 |
Линейные и нелинейные с постоянными коэффициентами |
60 |
От 0,1 до 1000 |
www.cultinfo.ru/fulltext/001/008/053/769.htm