

Министерство образования и науки, молодежи и спорта Украины
Мореходный колледж технического флота
Одесской национальной морской академии
Лабораторная работа №3,4,5
Тема: «Приобретение навыков работы с преобразователями.»
Цель работы:
Практическое изучение устройств и принципов работы преобразователей, расмотреть все виды преобразователей, понять их предел регулирования и измерения.
Программа работы:
Изучить конструкцию, принцип действия и назначение преобразователей, а также где используются.
Изучить работающий пример схемы каждой из преобразователей.
Приобрести навыки работы наладки и умение применять в будующем каждый под тип преобразователя.
Основные сведения об устройствах и работе преобразователей.
Резистивные преобразователи.
К ним относятся: реостатный, потенциометрический, угольный, проволочный тензорезистивный, полупроводниковый тензорезистивный. Такие преобразователи могут получать питание от источников постоянного и переменного тока, обладают достаточно высокой точностью. Конструктивное исполнение преобразователей может быть самое различное.
Реостатный преобразователь (рис. 11.1, а) имеет каркас 2 — неподвижная часть, на которой нанесена проволочная обмотка. Подвижной контакт 1 перемещается по обмотке, меняя ее рабочее сопротивление. Ось 3 подвижного контакта получает вращательное движение от из-
мерительного механизма в зависимости от изменения контролируемого параметра.
Потенциометрический преобразователь — электромеханический элемент (рис. 11.1, б), состоящий из проволочного потенциометра 2 и токосъемника 4, соединенных по определенной схеме с источником питания и электрической цепью потребителя. Действие потенциометри-
ческого преобразователя основано на преобразовании линейного х (t) или углового a (t) механического перемещения4 чувствительного элемента в выходной электрический сигнал. Съем тока с токосъемника 4 осуществляется через контактное кольцо 1.
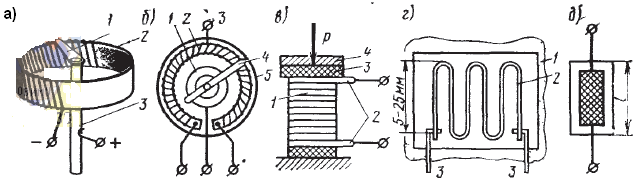
Рис 11.1 Резистивные преобразователи
а -реостатный, б – потенциометрический, в - проволочный тензометрический,
г - полупроводниковый тензометрический, д – угольный.
Преобразователи выполняются с выводом 3 от средней точки и без него, одинарные и сдвоенные Каркас преобразователя изготавливают из пластмассы, керамики или алюминия в виде цилиндрического кольца 5. Закон преобразования перемещения в электрический сигнал
(или вид статической характеристики преобразователя) определяется профилем каркаса. В частном случае потенциометрический преобразователь реализует релейный закон преобразования перемещения в напряжение. Такой преобразователь называют релейным потенциометрическим (рис. 11.2, а).
Половина каркаса 1, выполненного из
диэлектрического материала, покрыта
токопроводящей пленкой, например, хрома
(участок аб), а другая половина каркаса
свободна от покрытия (участок бе).
Подвижная контакт-деталь, установленная
с помощью пружины, обеспечивающей
необходимое контактное нажатие, жестко
соединена с подвижной частью преобразователя
первичной информации, например с рамкой
гироскопа. Поэтому перемещение х (t)или
![]() (t)
подвижного контакта относительно
каркаса является выходом преобразователя
первичной информации. Токопроводящий
участок аб каркаса соединен последовательное
подвижным контактом, потребителем Zн и
источником питания
(t)
подвижного контакта относительно
каркаса является выходом преобразователя
первичной информации. Токопроводящий
участок аб каркаса соединен последовательное
подвижным контактом, потребителем Zн и
источником питания
Uн = U. При перемещении контактного элемента вдоль участка бв выходное напряжение на потребителе будет равно нулю, при нахождении контакта в любой точке участка аб напряжение Uвых = U. Статическая характеристика преобразователя Uвых = f(х) является релейной нечетной характеристикой (рис.11.2, б).

Рис. 11.2. Релейный потенциометр:
a —схема включения; б — характеристика
Действие тензорезистивных преобразователей основано на принципе изменения электрического сопротивления металлических и полупроводниковых элементов при их растяжении и сжатии.
На полоску бумаги (рис. 11.1, в) длиной 25—40 мм наклеивают (слой клея 1) зигзагообразную тонкую (диаметром не более 0,5 мм) константановую проволоку 2, которая имеет медные выводы 3. Преобразователь наклеивают на деталь. При деформации детали деформируются и проволока при растяжении удлиняется и делается тоньше,
а при сжатии наоборот. От этого меняется ее электрическое сопротивление. Питание преобразователя осуществляется постоянным или переменным напряжением 6 - 10 В.
Полупроводниковые тензорезистивные преобразователи представляют собой пластины монокристаллов германия или кремния, наклеенные на бумажную подложку (рис. 11.1, г), к которым присоединены металлические выводы. Размеры преобразователя: длина 5—15 мм,
площадь сечения (0,2/0,7) (0,04/0,2) мм2. Такие преобразователи обладают очень высокой чувствительностью.
Индуктивные преобразователи.
Предназначены такие электромеханические устройства для преобразования угловых и линейных перемещений в модулированное напряжение. У таких преобразователей под
влиянием преобразуемой неэлектрической величины изменяется индуктивность.
Основными типами индуктивных преобразователей являются: преобразователи линейных перемещений различных типов для измерения параметров механических процессов; преобразователи угловых перемещений (взаимоиндуктивные — сельсины, поворотные трансформаторы, микросины, функциональные вращающиеся трансформаторы,
индуктосины и др.). Характеристикой индуктивного преобразователя (рис. 11.3, а) яв-
ляется зависимость тока, протекающего по катушке, от изменения воздушного зазора. Если перемещать якорь преобразователя, воздушный зазор б будет изменяться, а следовательно, будет изменяться и индуктивность катушки, которая обратно пропорциональна длине воздуш-
ного зазора. Ток в катушке определяется по закону Ома:
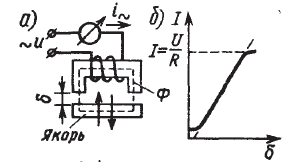
Рис. 11.3. Индуктивный преобразователь.
а — схема; б — характеристика
Как следует из формулы, при постоянных U и R ток в катушке зависит только от ее индуктивности или от воздушного зазора. Поскольку напряжение U, сопротивление R и частота f являются постоянными,ток в катушке преобразователя пропорционален воздушному зазору,
т. е.
![]() ,
где k — коэффициент пропорциональности.
Реальная характеристика преобразователя
(рис. 11.3, б) отличается от идеальной
(показана штриховой линией) наличием
нелинейности. Большинство индуктивных
преобразователей рассчитаны для работы
при относительно низких частотах
питающей сети (до 5000 Гц), так как при
высоких частотах растут потери.
Индуктивные преобразователи широко
распространены. Они просты, надежны,
бесконтактны и отличаются сравнительно
большой мощностью, работают на переменном
токе. Применяют пребразователи в основном
для измерения угловых и линейных
перемещений, а также давления. Индуктивные
преобразователи могут быть с подвижным
якорем, поворотным якорем и магнитоупругие.
,
где k — коэффициент пропорциональности.
Реальная характеристика преобразователя
(рис. 11.3, б) отличается от идеальной
(показана штриховой линией) наличием
нелинейности. Большинство индуктивных
преобразователей рассчитаны для работы
при относительно низких частотах
питающей сети (до 5000 Гц), так как при
высоких частотах растут потери.
Индуктивные преобразователи широко
распространены. Они просты, надежны,
бесконтактны и отличаются сравнительно
большой мощностью, работают на переменном
токе. Применяют пребразователи в основном
для измерения угловых и линейных
перемещений, а также давления. Индуктивные
преобразователи могут быть с подвижным
якорем, поворотным якорем и магнитоупругие.
Индуктивные преобразователи с подвижным якорем (рис. 11.4, а) имеют два сердечника с двумя симметрично расположенными катушками индуктивности и якорем, который связан с измеряемым объектом. При нулевом положении якоря воздушные зазоры бх и б2 равны, следовательно, и индуктивные сопротивления катушек тоже равны. Значит, токи It иI2, протекающие по резисторам R1 и R2, также равны и направлены встречно. Поэтому выходное напряжение Uвых, снимаемое с этих резисторов, равно нулю.
При перемещении якоря в любую сторону от нуля изменяется индуктивность катушек, а значит, токи I1 и I2 не будут равны. В результате на выходе появится напряжение, которое будет пропорционально перемещению якоря, связанного с измеряемым элементом. С помощью
таких преобразователей измеряют
перемещения с точностью до
![]() мм.
мм.
Индуктивные преобразователи с подвижным сердечником (рис. 11.4, б) имеют две симметричные катушки индуктивности цилиндрической формы, которые расположены на одной оси, а внутри катушек вдоль их оси перемещается сердечник, связанный с измерительным элементом. С помощью таких преобразователей измеряют линейные перемещения с точностью до 0,5—1,0 мм. Принцип работы этого преобразователя аналогичен принципу работы предыдущего.
Индуктивные преобразователи с поворотным
якорем (рис. 11.4, в) применяют для измерения
угловых перемещений. Их иногда называют
трансформаторными. Особенности таких
преобразователей заключаются в линейности
характеристик в пределах углов поворота
4—6° и незначительном моменте,
прикладываемом к оси. Когда якорь
расположен симметрично относительно
сердечника, т. е. в нулевом положении,
то э. д. с., наведенные в обмотках wl и w2,
равны по значению и направлены встречно,
поэтому выходное напряжение Uвых
равно нулю. При повороте якоря в любую
сторону на какой-либо угол Э происходят
такие же явления, как и в преобразователе
с подвижным якорем. В результате на
выходе преобразователя возникает Uвых,
пропорциональное углу поворота вала
![]()
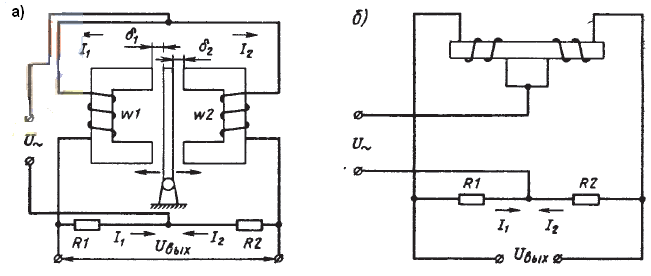
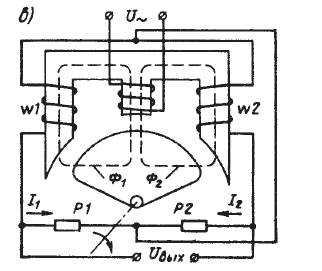
Рис. 11.4. Схемы индуктивных преобразователей:
а — с подвижным якорем, б — с подвижным сердечником; в — с поворотным якорем
Общими недостатками индуктивных преобразователей являются большие, габариты и большая масса.