

Синтез регуляторов методом модального оптимума.
Рассмотрим структурную схему электропривода:
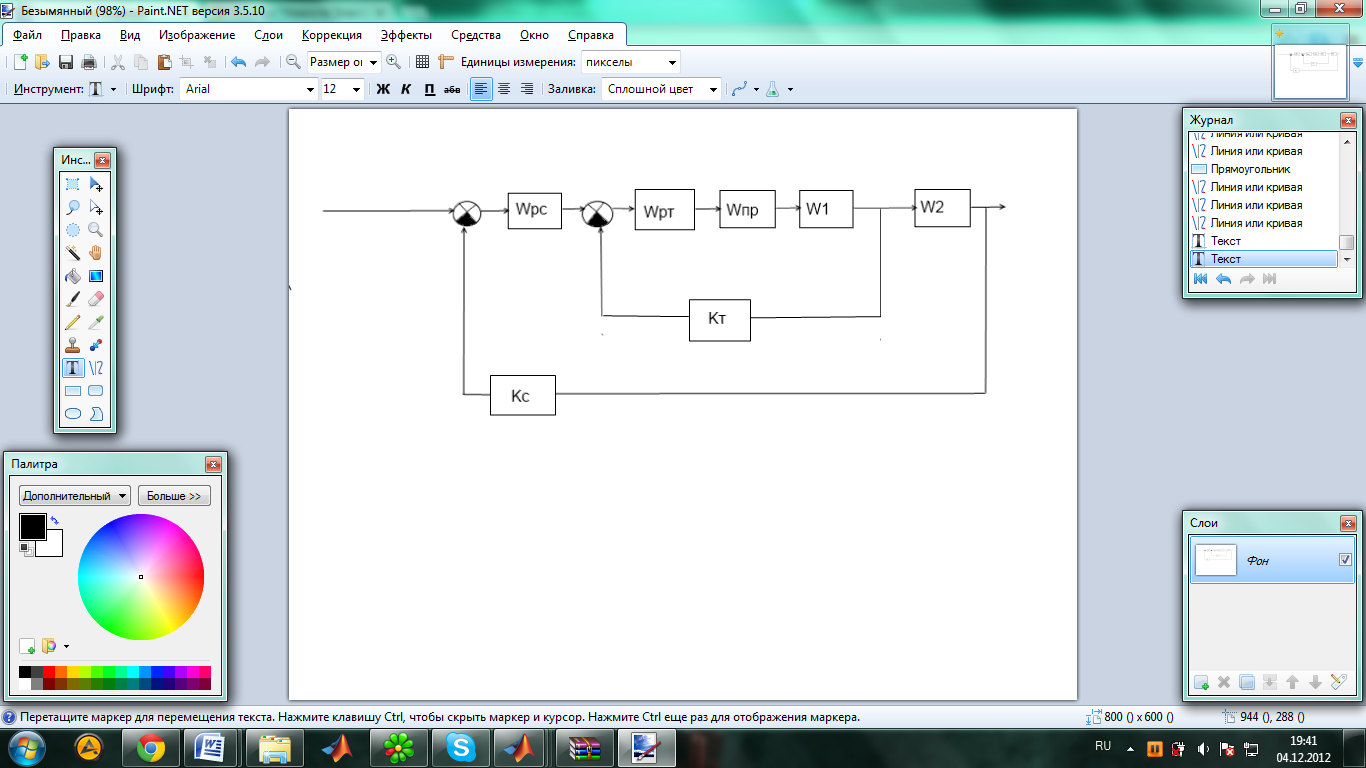
Рис.7. Структурная схема электропривода.
,где
Wрс - передаточная функция регулятора скорости
Wрт - передаточная функция регулятора тока
Wпр - передаточная функция преобразователя
W1 - передаточная функция электромагнитной постоянной
W2 - передаточная функция электромеханической постоянной
Кс – коэффициент скорости
Кт – коэффициент тока
Настройка регуляторов контура скорости и контуров тока производится по принципу последовательной коррекции, начиная всегда с внутреннего контура (тока).
Для синтеза регулятора тока составляем равенство произведений передаточных функций разомкнутой главной цепи и желаемой передаточной функции разомкнутого контура тока.
Синтез регулятора на технический оптимум обеспечивается следующей желаемой передаточной функцией основной цепи разомкнутого контура.
2.3 Расчет контура тока.
 (1)
(1)
, где Кт – коэффициент обратной связи по току
ан- коэффициент настройки контура, принимаемый равным 2, что соответствует настройке на оптимум с показаниями переходных процессов.
 - суммарная некомпенсируемая постоянная
времени контура регулирования
- суммарная некомпенсируемая постоянная
времени контура регулирования
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
Выразим
 :
:
 (6)
(6)
 (7)
(7)
,где
 -
-
Произведем расчеты:
 ,
,

, отсюда


 ,
где
,
где
 ,
где
,
где

 , где
, где
J – момент инерции якоря кг*м2
J*5 – момент инерции всего механизма
 -
скорость холостого хода
-
скорость холостого хода
 -
момент пусковой
-
момент пусковой
Найдем
.
Для этого запишем выражение
 .
.
При
режиме холостого хода произведение
 ,
таким образом
,
таким образом
 .
.
 ,
отсюда
,
отсюда
 ,
отсюда
,
отсюда

Таким
образом, можем найти передаточную
функцию




2.4 Расчет контура скорости.
 (8)
(8)
 (9)
(9)
 (10)
(10)

Составим выражение:
 (11)
(11)
Выразим
 :
:

3.1 Моделирование процесса в пакете MatLab Simulink.
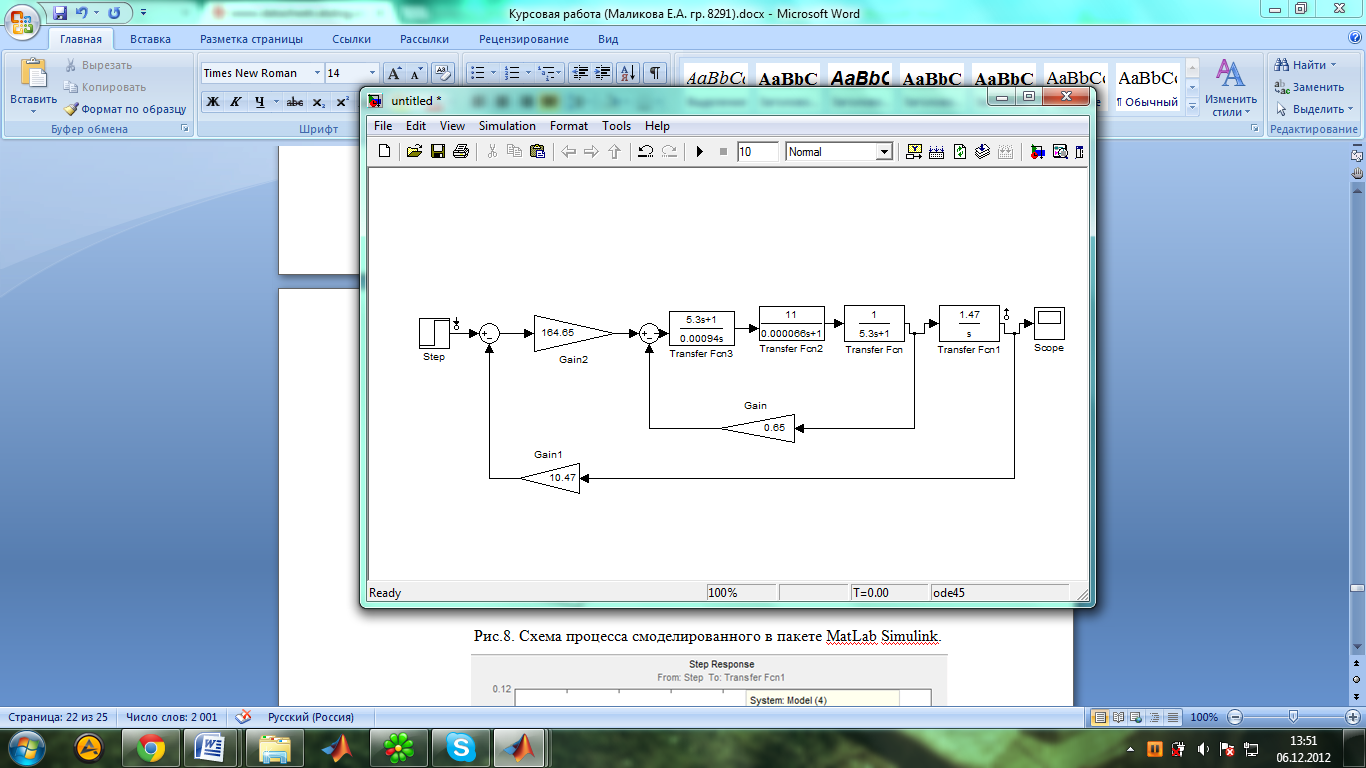
Рис.8. Схема процесса смоделированного в пакете MatLab Simulink.
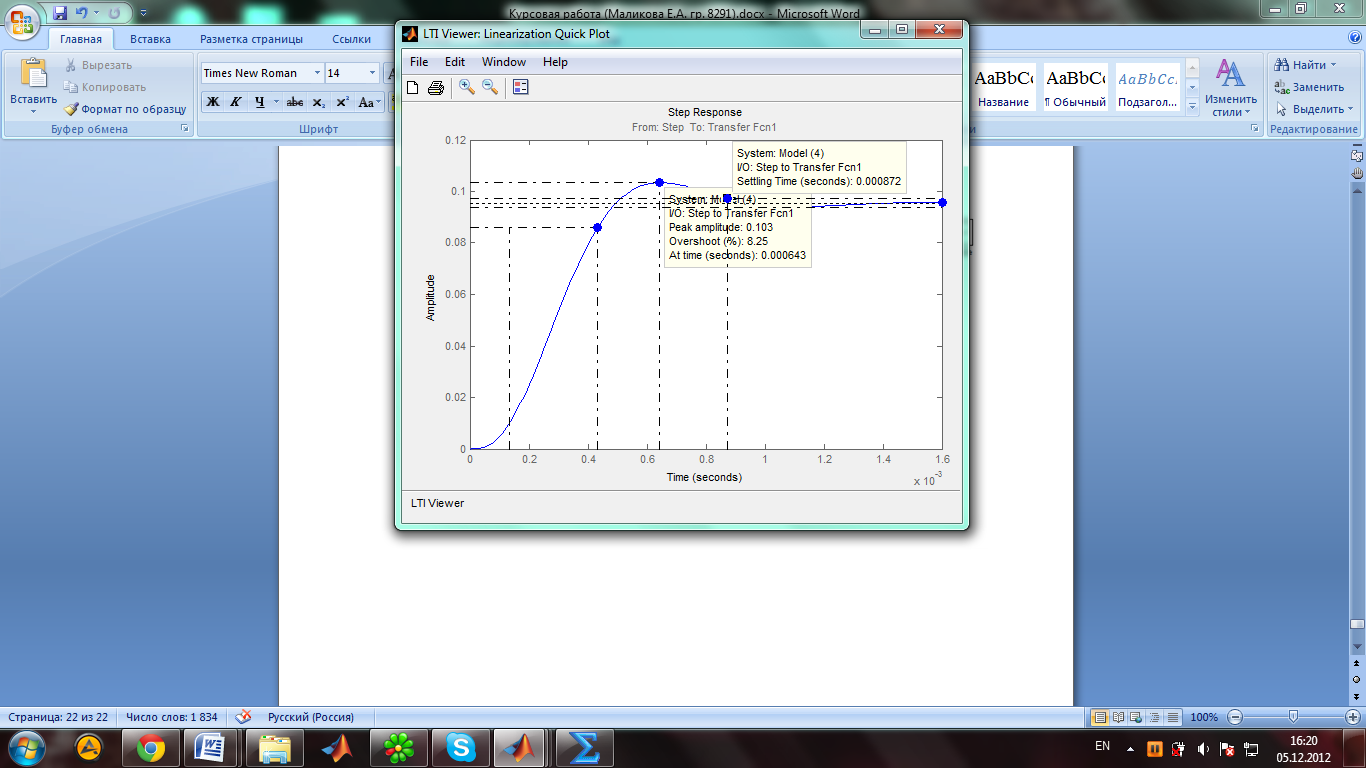
Рис.9. График переходного процесса.
В результате моделирования переходного процесса имеем время переходного процесса 0.000872, перерегулирование – 8.25%.
Заключение
В ходе выполнения курсового проекта был выбран двигатель постоянного тока - ДК1-5,2, с подходящими параметрами. Так же был осуществлен подбор силового драйвера, датчиков тока и скорости и микроконтроллера. Рассчитаны все передаточные функции, входящие в систему управления электроприводом. Данная схема была смоделирована в пакете MatLab Simulink, в результате чего был получен сходящийся переходный процессии и выявлены следующие параметры: tпп= 0.000872, перерегулирование – 8.25%.
В результате выполнения курсового проекта были получены новые практические навыки в подборе необходимых элементов схемы и углублены знания в области текущей дисциплины.