

Зміст
Колоквіум №2
2.1.1
1. Користуючись системою електромеханічних аналогій, запропонуйте механічні аналоги нелінійного опору та нелінійної провідності.
Механічним
аналогомо нелінійного опору є випадок
візка у ямі який коливається з нелінійним
декриментом
![]() ( тобто сила тертя є нелінійною) – для
( тобто сила тертя є нелінійною) – для
![]() маємо
маємо
![]() - а це відємне тертя. Прикладом реалізації
цього може бути зміна шорохуватості
поверхні, по якій рухається візок, або
магніт вбудований в деяку ділянку цієї
поверхні, що відштовухватиме візок
змінюючи силу реакції опори.
- а це відємне тертя. Прикладом реалізації
цього може бути зміна шорохуватості
поверхні, по якій рухається візок, або
магніт вбудований в деяку ділянку цієї
поверхні, що відштовухватиме візок
змінюючи силу реакції опори.
Механічний аналог нелінійної провідності є зворотній клапан, наприклад, у водопроводі, проспускна здатність якого залежить нелінійним чином від тиску води.
2. Чим, на Вашу думку, відрізняються активні лінії на базі активних провідностей та активних опорів?
Якщо ввести за аналогію силі струм, а зміщенню напругу, то різницю між активними лініями на базі нелінійних провідності та опору можна описати наступним чином. Активній лінії на базі нелінійної провідності відповідає N-подібна вольт-амперна характеристика нелінійного елемента.
Т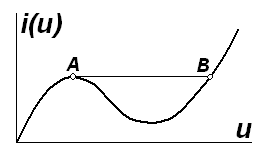 ут
струм через нелінійний елемент є
однозначною функцією прикладеної
напруги. Прикладом нелінійної провідності
може служити тунельний діод. Граничні
умови в такій системі визначатиме
напруга або ж зміщення елементів як
функція від часу. Таким чином здійснюється
передача деякого сигналу в лінії.
ут
струм через нелінійний елемент є
однозначною функцією прикладеної
напруги. Прикладом нелінійної провідності
може служити тунельний діод. Граничні
умови в такій системі визначатиме
напруга або ж зміщення елементів як
функція від часу. Таким чином здійснюється
передача деякого сигналу в лінії.
В S-подібній вольт-амперній характеристиці напруга на нелінійному елементі є однозначною функцією струму, який через нього протікає. Прикладом нелінійного опору може служити тиристор. В даному випадку граничною умовою для системи слугує залежність струму або ж сили від часу. Тут передача сигналу здійснюється шляхом зміни сили, що прикладається до об'єкту на іншому кінці лінії.
Тобто відмінною рисою цих двох типів ліній є граничні умови, що накладаються на систему та визначають характер передачі сигналів.
3. Поясніть якісно, чому на високих частотах нелінійність активних ліній можна вважати слабкою.
Можна
показати, що вимога високої частоти
сигналу
![]() тотожня вимозі повільної зміни амплітуди
(ф-ла 2.2.6
тотожня вимозі повільної зміни амплітуди
(ф-ла 2.2.6
 .)
в просторі. Оскільки нелінійний доданок
містить множник похідної по часу, у
вигляді, наприклад,
.)
в просторі. Оскільки нелінійний доданок
містить множник похідної по часу, у
вигляді, наприклад,
![]() (ф-ла 2.2.3),
(ф-ла 2.2.3),
![]() і тоді біля нелінійності маємо коефіцієнт
і тоді біля нелінійності маємо коефіцієнт
![]() отже швидкі осциляції експоненти
створюють ефект усереднення нелінійності,
що зменшує її вплив. Тому й її можна
вважати слабкою на високих частотах.
отже швидкі осциляції експоненти
створюють ефект усереднення нелінійності,
що зменшує її вплив. Тому й її можна
вважати слабкою на високих частотах.
4. Намалюйте миттєвий розподіл напруги вздовж активної лінії, в якій збуджені дві зустрічні хвилі, для різних початкових співвідношень між їхніми інтенсивностями. Як вони змінюватимуться з часом?
при невеликих початкових значеннях m1 та m2 спостерігається періодична зміна амплітуд зустрічних хвиль у просторі. Зокрема, при m1=m2=1/3 обидві хвилі мають амплітуди, незалежні від координати. Навпаки, при великих початкових значеннях m1 та m2 півпростір х>0 займає хвиля 1, а півпростір х<0 – хвиля 2.
Графічно:
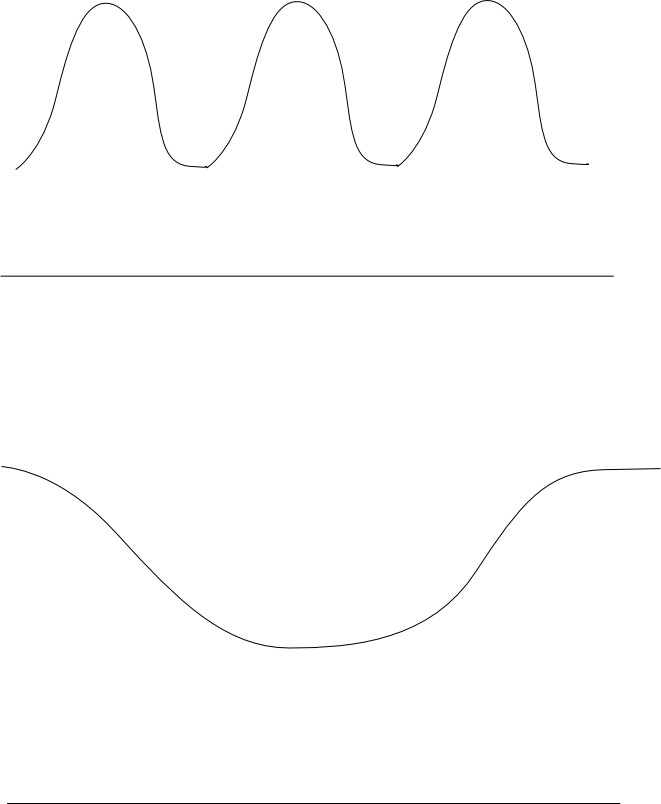 Тут
мається на на увазі, що при малих
амплітудах (верхній рисунок) в фіксований
момент часу більша й менша амплітуди
хвилі чергуються в просторі. При великих
амплітудах (нижній рисунок), навпаки
одна хвиля плавно переходить в іншу без
коливань у просторі.
Тут
мається на на увазі, що при малих
амплітудах (верхній рисунок) в фіксований
момент часу більша й менша амплітуди
хвилі чергуються в просторі. При великих
амплітудах (нижній рисунок), навпаки
одна хвиля плавно переходить в іншу без
коливань у просторі.
Сенс такий, що на рис. 2.1.6 методи стрілки на лініях означають рух в напрямку додатньої координати. За малих амплітуд, ми рухаємося по замкненим кривим, тобто мінімуми й максимуми чергуються, а за великих ніякого чергування не відбувається.
2.1.2