

§ 3 Динамический анализ механизмов
Основная задача динамического анализа состоит в определении управляющего силового воздействия - уравновешивающей силы или уравновешивающего момента, приложенного к кривошипу. Эти силовые факторы являются функциями положения кривошипа и в данный момент обеспечивают движение звеньев механизма по заданному закону и уравновешивание механизма.
Дополнительной задачей динамического анализа механизмов является определение реакций в кинематических парах. Знание этих сил необходимо при расчете звеньев механизма на прочность, жесткость, износостойкость, виброустойчивость и других расчетах при проектировании механизмов.
Для проведения динамического исследования применяется метод кинетостатики, основанный на принципе Д,Аламбера, применительно к механизмам сущность этого метода можно сформулировать так: «Если ко всем внешним, действующим на звено механизма, силам присоединить силы инерции, то под действием всех этих сил звено можно рассматривать условно находящимся в равновесии».
Силовой расчет с применением принципа Д,Аламбера называется кинетостатическим.
3.1. Определение сил и моментов инерции звеньев
Изучение сил и моментов инерции, действующих на звено механизма, ведут в зависимости от характера движения звена.
Общий случай. Звено АВ совершает плоскопараллельное движение (рис. 10). Все точки звена совершают движения с различными по величине и направлению ускорениями. Соответственно этому к каждой материальной точке звена может быть приложена присущая ей элементарная сила инерции:
![]()
Как
известно из теоретической механики,
все эти элементарные
силы инерции могут быть сведены к
главному вектору
сил инерции
![]() ,
приложенному в центре тяжести S
звена
и к главному моменту сил инерции
,
приложенному в центре тяжести S
звена
и к главному моменту сил инерции
![]() ,
которые
соответственно
выражаются формулами:
,
которые
соответственно
выражаются формулами:
![]()
где
т
—
масса звена, кг;
![]() —
ускорение центра тяжести, м/с2;
—
ускорение центра тяжести, м/с2;
![]() — момент инерции
звена относительно оси, проходящей
через центр тяжести, кгм2;
— момент инерции
звена относительно оси, проходящей
через центр тяжести, кгм2;
![]() —
угловое
ускорение звена, 1/с2.
—
угловое
ускорение звена, 1/с2.
Знаки минус в формулах указывают на то, что главный вектор и главный момент сил инерции направлены в стороны, противоположные направлениям соответствующих ускорений.
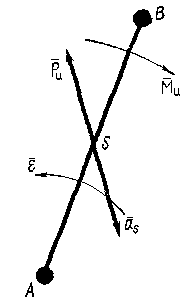
Рис. 10
Частные случаи.
1.
Звено совершает вращательное
движение вокруг оси, не проходящей
через центр тяжести (рис. 11).
Здесь аналогично все элементарные силы
инерции приводятся к главному вектору
сил инерции
![]() ,
(H)
и к главному моменту сил инерции
,
(H)
и к главному моменту сил инерции
![]() (Нм).
Если звено вращается равномерно (
(Нм).
Если звено вращается равномерно (![]() = 0), то
= 0), то
![]() =
0, а ускорение центра масс будет равно
нормальной составляющей
=
=
0, а ускорение центра масс будет равно
нормальной составляющей
=![]() ,
тогда
,
тогда
![]() =
=![]() .
.

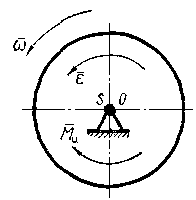
Рис. 11 Рис. 12
2.
Звено вращается вокруг оси, проходящей
через центр тяжести его (рис 12), например
ротор электродвигателя. В этом случае
![]() =
0 следовательно главный вектор сил
инерции
=
0 следовательно главный вектор сил
инерции
![]() =
0.
Если
угловое ускорение
=
0.
Если
угловое ускорение
![]() ,
то к звену прикладывается только главный
момент сил инерции
,
то к звену прикладывается только главный
момент сил инерции
![]()
3.
Звено совершает поступательное движение
(рис. 13) с ускорением as
>
0. Считая, что масса звена сосредоточена
в центре тяжести S,
главный вектор сил инерции выразится
так:
![]() .
Поскольку
угловое ускорение ε
= 0, то главный момент
сил инерции Ми
=
0.
.
Поскольку
угловое ускорение ε
= 0, то главный момент
сил инерции Ми
=
0.
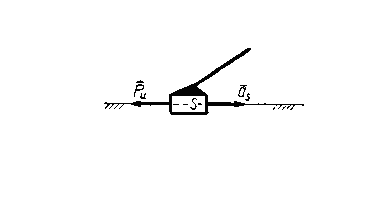
Рис. 13