

2.2. Построение траекторий точек
Чтобы построить траекторию какой-либо точки, нужно, построить несколько планов положений механизма, найти на каждом из этих планов положение заданной точки и последовательно соединить полученные точки плавной кривой (рис.4).
Обычно планы положений механизма строятся для нескольких равноотстоящих положений ведущего звена О1А. Для этого окружность —- траектория точки А — делится на несколько равных частей. Одно из положений точки А принимается за нулевое, а остальные пронумеровываются в направлении вращения звена О1А. За нулевое положение точки А кривошипа выбирают такое, при котором дальнейшее движение точки А в заданную сторону вращения будет соответствовать рабочему ходу исполнительного звена механизма.
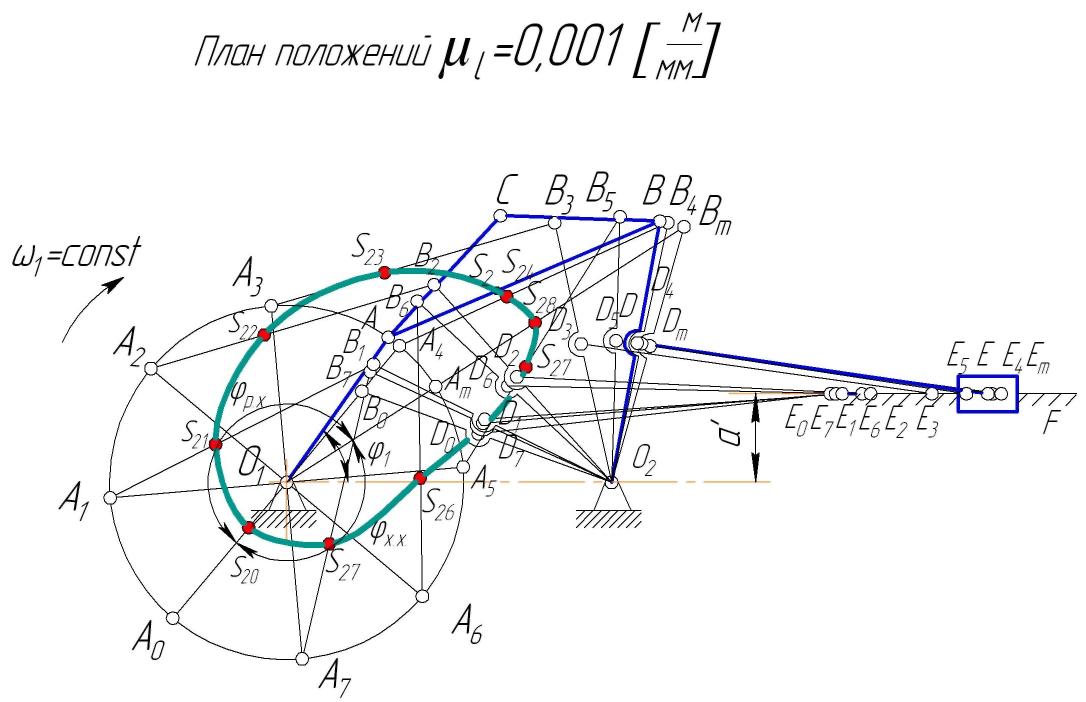
Рис. 4
Пример 3. Для механизма по условию примера 1 построить планы положений по восьми равноотстоящим положениям звена О1А, начертить траекторию точки S2 и разместить траекторию точки В, если Las2 = 0,02 м (рис. 1).
Решение. Кривошип совершает полное круговое движение и траекторией движения точки А будет окружность радиуса О1А. Проводим эту окружность. Поскольку коромысло 3 совершает качательное движение, то точка В движется по дуге окружности радиуса О2В. Для разметки траектории точки В необходимо на дуге радиуса О2В найти крайние положения точки В.
Точка В занимает крайнее левое положение тогда, когда длина О1А кривошипа вычитается из длины АВ шатуна, и крайнее правое,— когда эти длины складываются.
Для нахождения крайних положений точки В делаем две засечки из центра О1 радиусами rmin= А В — О1А и rmах = АВ + О1А на дуге радиуса O2B. Получаем точки В0 и Вт.
На пересечении прямой В0О1 с окружностью радиуса О1А находим точку А0, а на пересечении прямой ВтО1 с этой окружностью — точку Ат.
Два крайних положения О1А0 и О1Ат кривошипа делят его полный оборот (угол 360°) на два неравных по величине угла.
Больший из них обычно соответствует рабочему ходу исполнительного звена механизма, меньший — холостому ходу. На рис. 4 эти углы обозначены соответственно φрх и φхх.
Чтобы при дальнейшем движении в заданную сторону вращения точка А кривошипа двигалась в направлении рабочего хода исполнительного звена механизма, за нулевое положение принимаем крайнее левое положение точки А, обозначенное А0 (рис. 4).
Соединяем точки В0 и Вт с точкой 02, находим положения точек D0, Dm, E0, Em и получаем два положения механизма, соответствующие крайним положениям точки В.
Чтобы упростить дальнейшее построение, положения точки С не наносим.
Разбиваем окружность радиуса О1А, начиная от точки А0, на восемь равных частей (в задании на курсовой проект требуется разбить на двенадцать) и нумеруем точки деления в направлении вращения звена О1А. Используя метод засечек, строим первое, второе и все последующие положения механизма.
Определяем длину отрезка
![]()
и находим положения точек S20, S2l, S22 и т. д.
Соединяем полученные точки плавной кривой. Это и будет траектория точки S2.
2.3 Построение планов скоростей
Зная закон движения ведущего звена и длины всех звеньев механизма, можно определить скорости его точек по величине и направлению в любом положении механизма путем построения плана скоростей для этого положения.
Построение планов скоростей и чтение их во многом упрощаются при использовании свойств этих планов, которые заключаются в следующем:
Векторы, исходящие из полюса, изображают абсолютные скорости соответствующих точек звеньев механизма в масштабе плана скоростей. Точки плана скоростей, соответствующие неподвижным точкам механизма, находятся в полюсе плана.
Векторы, соединяющие концы векторов абсолютных скоростей, выражают величины и направления относительных скоростей.
Векторы относительных скоростей точек звена на плане скоростей образуют фигуру, подобную одноименной жесткой фигуре, образованной отрезками, соединяющими эти точки звена на плане механизма, повернутую по отношению к последней на 90° в сторону мгновенного вращения данного звена.
Пример 4. Определить абсолютные и относительные скорости точек звеньев и угловые скорости звеньев в восьми положениях механизма (см. рис. 4) методом планов скоростей. Построить годограф скоростей центра масс S2 шатуна 2. Кривошип O1A имеет частоту вращения n1 = 120 об/мин в направлении по часовой стрелке. Размеры звеньев — те же.
Решение.
Построение
плана скоростей рассмотрим на примере
одного положения механизма, когда угол
поворота кривошипа
![]() ,
(это положение на рис. 4 выделено).
,
(это положение на рис. 4 выделено).
Определяем угловую скорость кривошипа О1А по формуле:
![]() 1/c.
1/c.
Из теоретической механики известно, что скорость какой-либо точки звена может быть представлена в виде векторной суммы переносной и относительной скоростей. Тогда абсолютная скорость точки А кривошипа О1А будет определятся
![]()
где
![]() - переносная
скорость т. О1
,
- переносная
скорость т. О1
,
![]() -
относительная
скорость т. А
во вращении
вокруг т. О1.
Т. о., абсолютная скорость совпадает с
относительной, поэтому скорость
точки А
находим
по формуле
-
относительная
скорость т. А
во вращении
вокруг т. О1.
Т. о., абсолютная скорость совпадает с
относительной, поэтому скорость
точки А
находим
по формуле
![]() м/с.
м/с.
Вектор
![]() a
направлен
перпендикулярно к оси звена O1A
в
сторону его вращения.
a
направлен
перпендикулярно к оси звена O1A
в
сторону его вращения.
Задаемся
длиной отрезка ра,
который
будет изображать на
плане скорость
![]() ,
точки
A;
ра
=
66
мм.
Масштаб плана скоростей
,
точки
A;
ра
=
66
мм.
Масштаб плана скоростей
![]() м/с·мм.
м/с·мм.
От произвольной точки р, принятой за полюс плана скоростей, откладываем перпендикулярно к звену О1А отрезок ра (рис. 6).
Скорости
неподвижных точек О1
и
O2
равны нулю, поэтому
векторы
![]() и
и
![]() также равны нулю и, следовательно,
токи о1
и
о2
на плане скоростей совпадают с полюсом
р.
также равны нулю и, следовательно,
токи о1
и
о2
на плане скоростей совпадают с полюсом
р.
Для определения скорости точки В воспользуемся векторными уравнениями:
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
где
![]() —
скорость точки А
в
переносном движении;
—
скорость точки А
в
переносном движении;
![]() —
относительная скорость точки
В
во
вращении вокруг точки А;
—
относительная скорость точки
В
во
вращении вокруг точки А;
![]() —
скорость точки
O2;
—
скорость точки
O2;
![]() —
относительная скорость точки В
во
вращении
вокруг точки O2.
—
относительная скорость точки В
во
вращении
вокруг точки O2.
В
этих уравнениях скорость
известна
по величине и
направлению, скорость
=
0.
Относительные скорости
и
известны
лишь по линии действия:
перпендикулярна
к звену АВ,
перпендикулярна
к звену 02В.
Поэтому
для определения скорости
![]() точки
В
через
точку
а
(конец
вектора скорости
)
проводим
перпендикулярно
звену АВ
линию
действия скорости
,
а
через точку
о2,
совпадающую с полюсом р
плана
скоростей, проводим
перпендикулярно звену О2В
линию
действия скорости
.
На
пересечении этих двух линий действия
получим
точку b
— конец вектора скорости
точки
В
через
точку
а
(конец
вектора скорости
)
проводим
перпендикулярно
звену АВ
линию
действия скорости
,
а
через точку
о2,
совпадающую с полюсом р
плана
скоростей, проводим
перпендикулярно звену О2В
линию
действия скорости
.
На
пересечении этих двух линий действия
получим
точку b
— конец вектора скорости
![]() точки
В:
точки
В:
![]() м/с.
м/с.
Направление
скорости
определяется
направлением вектора
![]() .
.
Согласно
уравнению (2.1) вектор
![]() изображает
относительную скорость
точки
В
во
вращении вокруг точки А:
изображает
относительную скорость
точки
В
во
вращении вокруг точки А:
![]() м/с.
м/с.
Согласно
уравнению (2.2) вектор
![]() (
(![]() )
изображает
относительную скорость
)
изображает
относительную скорость
![]() точки
В
во
вращении вокруг
точки
O2:
точки
В
во
вращении вокруг
точки
O2:
![]() м/с.
м/с.

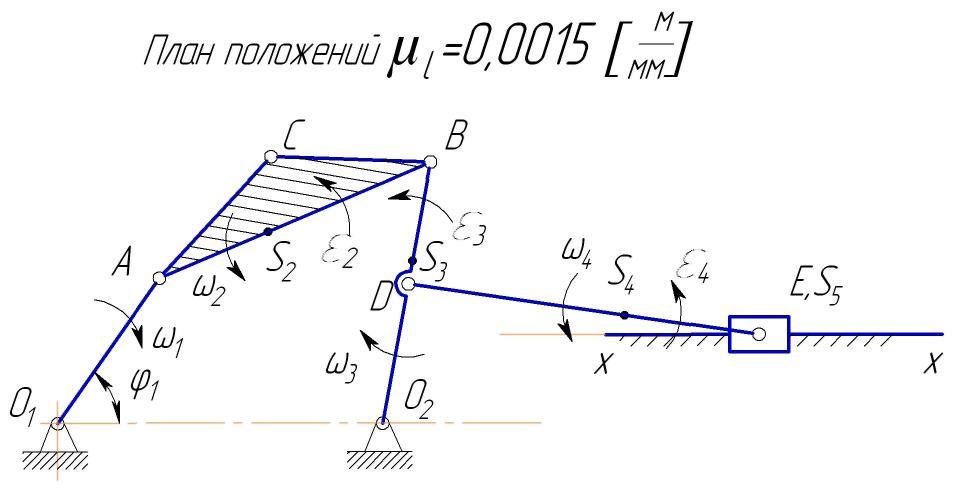
Рис. 5
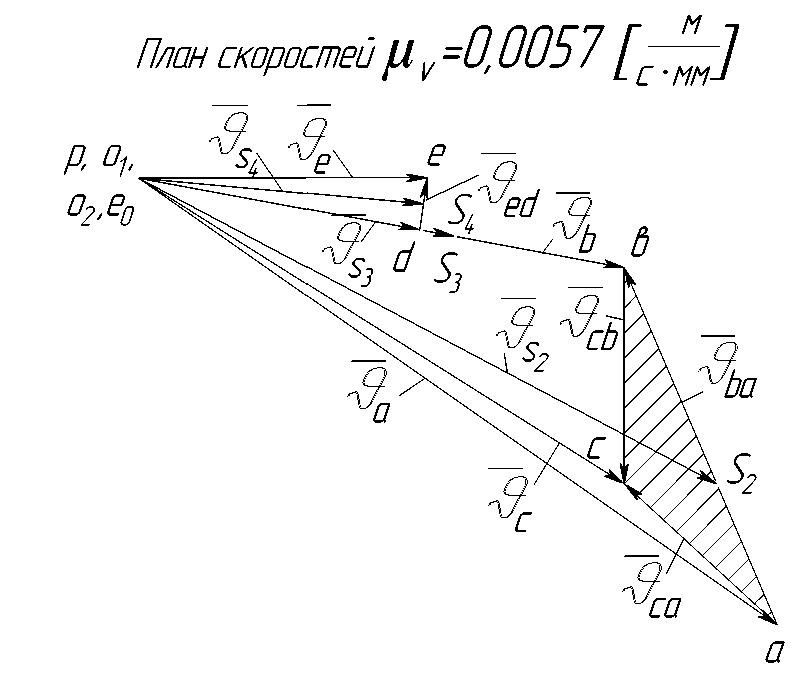
Рис. 6

Рис. 7
Положение точки с (конец вектора скорости точки С) определяем на плане скоростей по теореме подобия (третье свойство планов скоростей). На отрезке ab плана скоростей строим треугольник аbс, подобный треугольнику ABC звена 2. Определяем длины отрезков ас и bc из пропорций
![]() и
и
![]()
Поскольку АС = ВС, то
![]() мм.
мм.
Из
точек а
и b
плана
скоростей радиусами, равными соответственно
отрезкам ас
и
bc,
делаем
засечки. Получив две точки пересечения
этих дуг, справа и слева от вектора
.
За
точку с
плана
скоростей следует взять ту из полученных
точек, при которой порядок букв в
треугольниках abc
и
ABC
будет
одинаковым. Так, например, при обходе
сторон
![]() ABC
звена
2
по
направлению вращения часовой стрелки
читаем: А
ABC
звена
2
по
направлению вращения часовой стрелки
читаем: А![]() С
В. Порядок
букв в треугольнике
abc
при
обходе сторон треугольника также по
часовой стрелке
должен сохраниться а
с
b.
Следовательно,
точка
с
плана
скоростей будет слева от вектора
.
С
В. Порядок
букв в треугольнике
abc
при
обходе сторон треугольника также по
часовой стрелке
должен сохраниться а
с
b.
Следовательно,
точка
с
плана
скоростей будет слева от вектора
.
Соединяем
полюс плана скоростей р
с
точкой с
и
определяем
величину скорости
![]() точки
С:
точки
С:
![]() м/с.
м/с.
Согласно тому же свойству планов скоростей находим положение точки d на плане исходя из пропорции:
![]()
В этом случае фигура относительных скоростей o2db на плане скоростей будет прямой по подобию с прямой О2B механизма:
![]() мм.
мм.
Определив положение точки d на плане скоростей, находим величину скорости точки D
![]() м/с.
м/с.
Скорость точки Е шатуна DE представляем в виде векторной суммы переносной и относительной скоростей. Для ее определения воспользуемся векторными уравнениями:
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
где
![]() —
скорость точки D
в переносном движении;
—
скорость точки D
в переносном движении;
![]() —
относительная скорость точки
Е
во
вращении вокруг точки D;
—
относительная скорость точки
Е
во
вращении вокруг точки D;
![]() —
скорость точки
Е0,
принадлежащей
стойке и совпадающей в данный момент
с точкой Е
ползуна;
—
скорость точки
Е0,
принадлежащей
стойке и совпадающей в данный момент
с точкой Е
ползуна;
![]() —
скорость точки Е
в
поступательном движении относительно
точки Е0.
—
скорость точки Е
в
поступательном движении относительно
точки Е0.
В
этих уравнениях скорость
известна
по величине и
направлению, скорость
=
0. Относительные скорости
и
известны
лишь по линиям действия:
перпендикулярна
к звену DE,
параллельна
оси направляющих
ползуна. Для определения скорости точки
Е
через
точку d
плана
скоростей проводим перпендикулярно
звену DE
линию
действия скорости
,
а
через точку е0,
совпадающую
с полюсом плана р
параллельно
оси направляющих
ползуна (х
—
х)
—
линию действия скорости
.
Точка
е
пересечения
этих линий действия определяет
конец вектора скорости
![]() точки
Е.
Величина
скорости
точки
Е.
Величина
скорости
![]() м/с.
м/с.
Вектор de определяет величину и направление скорости
![]() м/с.
м/с.
Исходя из теоремы подобия (третье свойство планов скоростей) находим на плане точки s2, s3, s4, соответствующие центрам тяжести звеньев S2, S3 и S4. Из полюса р в эти точки проводим векторы. Определяем величины скоростей центров тяжести:
![]() м/с;
м/с;
![]() м/с;
м/с;![]()
![]() м/с.
м/с.
Переходим к определению угловых скоростей звеньев. Угловая скорость ω1 ведущего звена известна по величине и направлению (ω1 = 12,56 1/с и это звено вращается по часовой стрелке).
Чтобы
определить угловую скорость ω2
звена АВ,
рассмотрим
вращение точки В
вокруг
точки А.
Направление
скорости
точки
В
во
вращении вокруг точки А
определяется
направлением вектора
![]() .
Мысленно
переносим этот
вектор в точку В
механизма
и считаем точку А
как
бы неподвижной.
Точка В
в
направлении вектора
вращается
относительно точки А
против
часовой стрелки, что и
определяет направление вращения звена
АВ
(рис.
5).
Находим
величину
угловой скорости второго звена по
формуле
.
Мысленно
переносим этот
вектор в точку В
механизма
и считаем точку А
как
бы неподвижной.
Точка В
в
направлении вектора
вращается
относительно точки А
против
часовой стрелки, что и
определяет направление вращения звена
АВ
(рис.
5).
Находим
величину
угловой скорости второго звена по
формуле
![]() 1/c.
1/c.
При
определении направления угловой скорости
ω3
поступаем
аналогично. Перенесенный в точку В
звена
O2В
вектор
![]() показывает,
что точка В
вращается
относительно точки
O2
по часовой стрелке. Это определяет
направление угловой
скорости третьего звена (рис. 5):
показывает,
что точка В
вращается
относительно точки
O2
по часовой стрелке. Это определяет
направление угловой
скорости третьего звена (рис. 5):
 1/с.
1/с.
Чтобы
определить угловую скорость ω4
звена DE,
мысленно
переносим вектор
![]() скорости
в
точку Е.
В
направлении вектора
точка
Е
вращается
относительно точки
D,
которую
считаем как бы неподвижной, против
часовой
стрелки, что и определяет направление
вращения звена
DE.
Величина
этой угловой скорости
скорости
в
точку Е.
В
направлении вектора
точка
Е
вращается
относительно точки
D,
которую
считаем как бы неподвижной, против
часовой
стрелки, что и определяет направление
вращения звена
DE.
Величина
этой угловой скорости
![]() 1/с.
1/с.
Угловая скорость ползуна 5, совершающего прямолинейное поступательное движение, равна нулю.
Аналогично строятся планы скоростей для остальных положений механизма.
Полученные значения абсолютных и относительных скоростей точек и значения угловых скоростей звеньев для всех положений механизма сводим в таблицу 2.
Таблица 2
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
pa, мм |
… |
… |
… |
66 |
… |
… |
… |
… |
… |
υA, м/с |
… |
… |
… |
0,377 |
… |
… |
… |
… |
… |
pb, мм |
… |
… |
… |
42 |
… |
… |
… |
… |
… |
υB, м/с |
… |
… |
… |
0,24 |
… |
… |
… |
… |
… |
ba, мм |
… |
… |
… |
33 |
… |
… |
… |
… |
… |
υBA, м/с |
… |
… |
… |
0,188 |
… |
… |
… |
… |
… |
pc, мм |
… |
… |
… |
48 |
… |
… |
… |
… |
… |
υC, м/с |
… |
… |
… |
0,274 |
… |
… |
… |
… |
… |
pd, мм |
… |
… |
… |
22,4 |
… |
… |
… |
… |
… |
υD, м/с |
… |
… |
… |
0,128 |
… |
… |
… |
… |
… |
pe, мм |
… |
… |
… |
23 |
… |
… |
… |
… |
… |
υE, м/с |
… |
… |
… |
0,131 |
… |
… |
… |
… |
… |
ed, мм |
… |
… |
… |
4,5 |
… |
… |
… |
… |
… |
υED, м/с |
… |
… |
… |
0,0257 |
… |
… |
… |
… |
… |
ps2, мм |
… |
… |
… |
55 |
… |
… |
… |
… |
… |
υ
S |
… |
… |
… |
0,314 |
… |
… |
… |
… |
… |
ps3, мм |
… |
… |
… |
26 |
… |
… |
… |
… |
… |
υ
S |
… |
… |
… |
0,148 |
… |
… |
… |
… |
… |
ps4, мм |
… |
… |
… |
22,5 |
… |
… |
… |
… |
… |
υ
S |
… |
… |
… |
0,128 |
… |
… |
… |
… |
… |
ω2, сек-1 |
… |
… |
… |
3,76 |
… |
… |
… |
… |
… |
ω3, сек-1 |
… |
… |
… |
5,32 |
… |
… |
… |
… |
… |
ω4, сек-1 |
… |
… |
… |
0,428 |
… |
… |
… |
… |
… |
Для построения годографа скорости центра масс S2 шатуна АВ перенесем со всех планов скоростей векторы скорости Vs2 , сохраняя их величину и направление, в общий полюс – произвольно выбранную точку на чертеже (рис. 8). Соединив концы векторов плавной линией, получим годограф скорости т. S2.
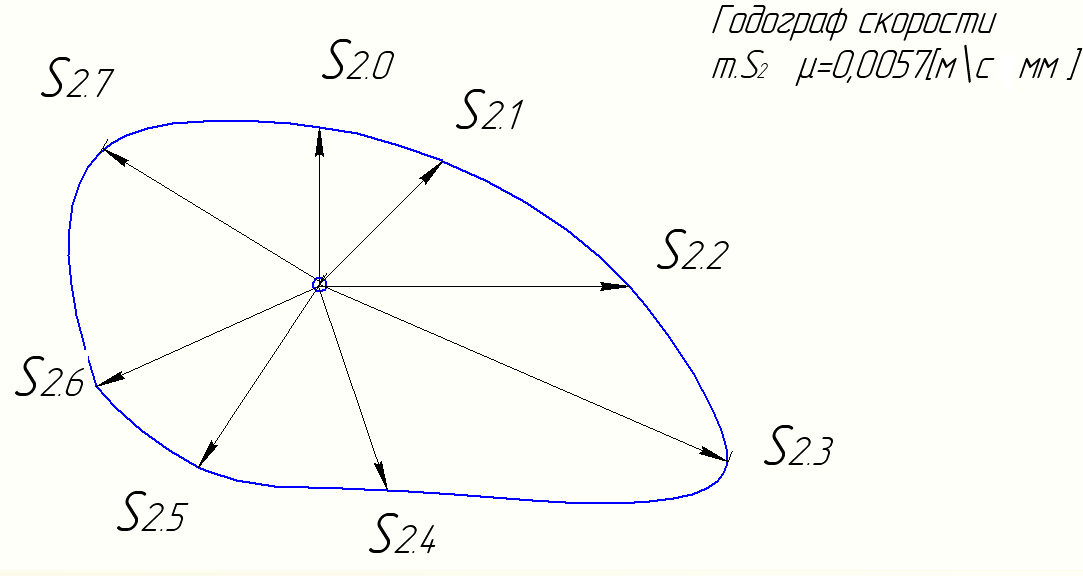
Рис. 8