

§ 2. Кинематический анализ механизмов
Кинематический анализ механизма состоит в изучении движения звеньев без учета сил, действующих на эти звенья, при заданном движении ведущего звена.
Кинематический анализ выполняется по кинематической схеме механизма. Он состоит в определении кинематических характеристик:
перемещений звеньев и траекторий, описываемых характерными точками звеньев (например, центра масс звена);
линейных скоростей и ускорений точек звеньев;
угловых скоростей и ускорений звеньев.
Кинематический анализ позволяет установить соответствие кинематических характеристик (перемещений, скоростей и ускорений) заданному закону движения механизма, а также получить исходные данные для выполнения динамического анализа. По полученным кинематическим характеристикам определяют инерционные нагрузки звеньев, кинетическую энергию механизма, закон движения ведущего и ведомых звеньев в функции времени.
Кинематическое исследование проводят графическим и аналитическим методами. Графическое определение кинематических параметров основано на геометрических построениях, погрешность результатов которых составляет (0,3-0,5)% по сравнению с аналитическими расчетами. Графический метод нагляден и универсален, так как позволяет определять положения, скорости и ускорения звеньев механизма любой структуры. Метод построения планов положений, скоростей и ускорений применяется при инженерных расчетах, как при анализе, так и при синтезе механизмов. Графический метод построения кинематических диаграмм позволяет использовать при анализе заданные в виде графиков законы изменения кинематических параметров в функции обобщенных координат φ1 и t.
2.1 Построение планов положений
Планом положения механизма называется чертеж, изображающий расположение его звеньев в какой-либо определенный момент движения. Отсюда следует, что план положения представляет собой кинематическую схему механизма, вычерченную для заданного положения кривошипа в определенном масштабе.
Планы положений механизмов, включающих в себя двухповодковые группы, строятся методом засечек.
Пример
2. Построить
план положения механизма (рис. 1) для
заданного угла поворота φ1
кривошипа при lO![]() A=
0,03 м; lO
O
A=
0,03 м; lO
O![]() = 0,055 м; lАВ
- 0,05 м; l
O
В=0,045м;
lAC
=
lBC
= 0,027 м; lO
D=
0,024 м; lDE
= 0,06 м;
смещение
= 0,055 м; lАВ
- 0,05 м; l
O
В=0,045м;
lAC
=
lBC
= 0,027 м; lO
D=
0,024 м; lDE
= 0,06 м;
смещение
![]() =0,015
м
и угол φ1
= 55°.
=0,015
м
и угол φ1
= 55°.
Решение.
Для построения плана принимаем, что
длину
кривошипа lO![]() A
на схеме будет изображать отрезок O1A,
длина которого равна 30 мм. Тогда масштаб
длин плана
A
на схеме будет изображать отрезок O1A,
длина которого равна 30 мм. Тогда масштаб
длин плана
![]() м/мм.
м/мм.
Затем вычисляем длины остальных отрезков, которые будем откладывать на чертеже:
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм;
мм;
![]() мм.
мм.
Построение плана (рис. 3) начинаем с нанесения элементов неподвижного звена. Штрихпунктирной линией проводим линию центров O1O2 и на ней наносим точки O1 и O2 на расстоянии O1O2 = 55 мм. На расстоянии а' от линии O1O2 проводим траекторию движения точки Е.
Под углом φ1 = 55° к линии O1O2 через точку О1 проводим ось ведущего звена и от этой точки откладываем на ней отрезок О1А. Это и будет изображение ведущего звена О1A в заданном положении.
Положение точки В определяем методом засечек. Для этого из точки А радиусом АВ, а из точки O2 радиусом О2B проводим дуги. Точка их пересечения и будет точкой В.
На звене O2В находим положение точки D. Сделав радиусом DE из точки D засечку на траектории движения точки Е, определяем положение этой точки на схеме. Положение точки С находим на пересечении дуг радиусов АС и ВС.

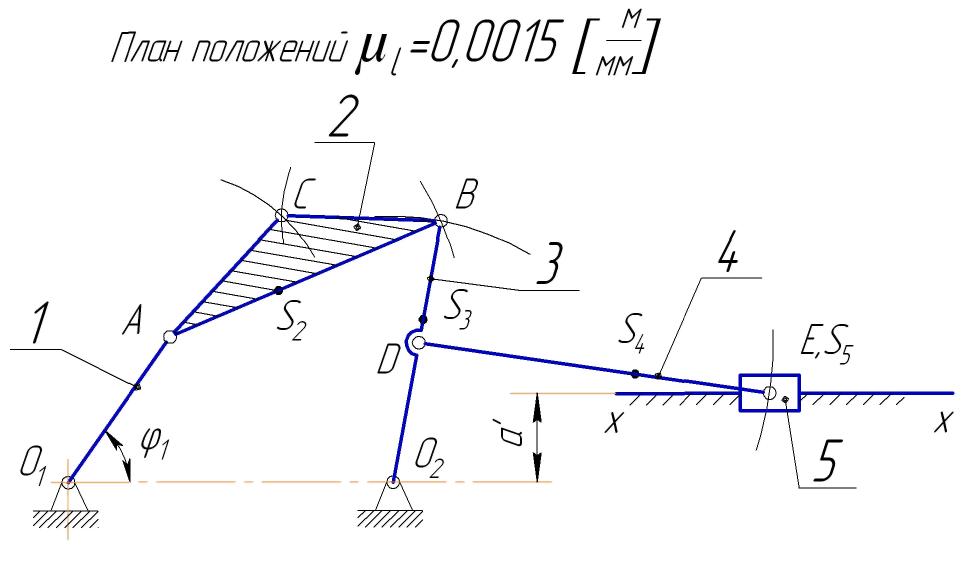
Рис. 3
Дополнительно заданы положения центров тяжести:
![]()
![]()
![]()
Используя
масштаб длин
![]() ,
на
плане положений отмечаем центры тяжести:
,
на
плане положений отмечаем центры тяжести:
![]() мм.
мм.
![]() мм.
мм.
![]() мм.
мм.