

Каков диапазон регулирования частоты вращения идптпу на спадающем участке рх?
Диапазон
регулирования частоты вращения на
спадающем участке РХ равен
![]() .
.

Рис.2.53.1
Постройте семейство графиков МХ и СХ ИДПТПУ. Какая величина является параметром этих семейств? К какому типу линий относятся указанные графики?
Семейство
графиков МХ (![]() при
при
![]() ;
см. равенство (9) в ответе на вопрос 2.49)
приведено на рисунке 2.53.1. Семейство
графиков скоростных характеристик (
;
см. равенство (9) в ответе на вопрос 2.49)
приведено на рисунке 2.53.1. Семейство
графиков скоростных характеристик (![]() при
;
см. равенство (9) с учётом (4) в ответе на
вопрос 2.49) приведено на рис. 2.53.2.
при
;
см. равенство (9) с учётом (4) в ответе на
вопрос 2.49) приведено на рис. 2.53.2.
Рис.2.53.2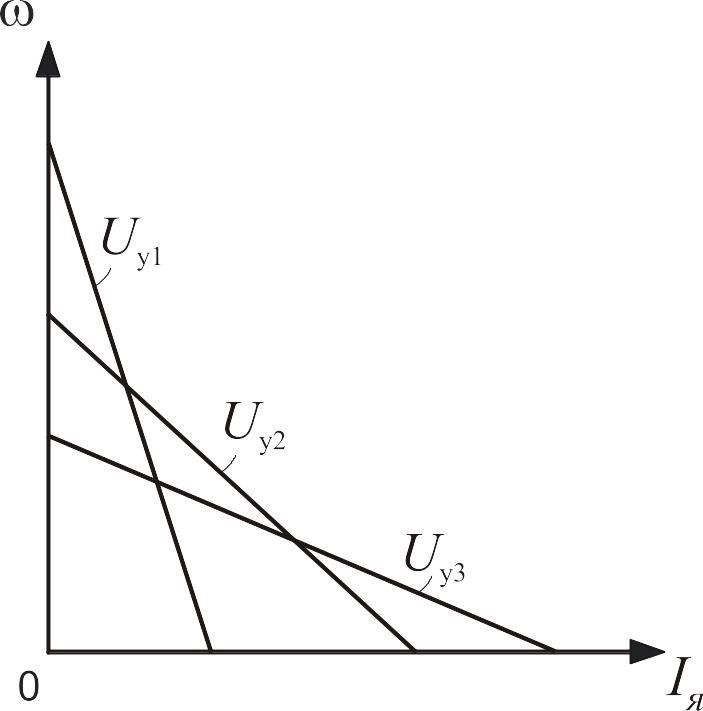
![]() <
<
![]() <
<![]() .
.
Параметром
этого семейства является коэффициент
сигнала
![]() .Тип
линий – прямые, пересекающиеся. Здесь:
.Тип
линий – прямые, пересекающиеся. Здесь:
![]() - ток якорной обмотки.
- ток якорной обмотки.
Параметром этих семейств является напряжение . Графики этих характеристик представляют собой прямые линии.
Как изменяются жесткость и крутизна МХ ИДПТПУ при изменении электромагнитного момента?
При изменении электромагнитного момента жесткость и крутизна МХ не изменяется.
Как изменяются жесткость и крутизна МХ ИДПТПУ при изменении напряжения, подводимого к обмотке главных полюсов?
При уменьшении напряжении управления жесткость МХ ИДПТПУ уменьшается, а крутизна МХ увеличивается.
Быстродействие какого способа регулирования частоты вращения ИДПТ выше: якорного или полюсного? Почему?
Выше быстродействие якорного способа регулирования. Это объясняется тем, что при полюсном управлении сигнал управления преобразуется через дополнительное инерционное звено – обмотку возбуждения (главных полюсов).
Какую часть от полной мощности, подводимой к ИДПТПУ, составляет мощность управления?
Мощность управления двигателя с полюсным управлением составляет 5% … 30% от полной мощности двигателя.
2.58 Какой способ управления ИДПТ требует меньшей мощности управления: якорный или полюсный?
Меньшей мощности управления требует двигатель с полюсным управлением.
Возможен или нет самоход в ИДПТПУ? Почему?
В ИДПТПУ самоход возможен, т.к. при нулевом напряжении управления в машине имеется небольшой остаточный магнитный поток, а следовательно, и небольшой электромагнитный момент, который при малом противодействующем моменте трения может привести якорь во вращение.
Какие типы ИДПТ различают по конструкции якоря?
По конструкции якоря различают следующие типы двигателей:
двигатели с якорем обычного исполнения (с вращающимся ферромагнитным сердечником);
двигатели с полым якорем;
двигатели с беспазовым якорем;
двигатели с цилиндрическим якорем с печатной обмоткой.
2.61 Какие характеристики ИДПТ улучшаются при использовании якорей неклассических конструкций? какие ухудшаются?
При использовании якорей неклассических конструкций повышается быстродействие двигателей и снижается искрение под щётками, но ухудшаются массогабаритные характеристики.