

8.1. Значення фактору неповноти інформації при прийняті управлінських рішень
Причини неповноти:1.невизначеність економічних процесів 2. Висока вартість повної 3.необхідно замовчувати про повну з різних причин.
Використання:поява в економіці нових понять і питання, почали використовуватись ймовірнісні моделі якими почали описувати різні процеси (Прогнози планування, страхування…).
Неповна інформація може існувати у всіх сферах діяльності – сфера послух,продажу, поставки ресурсів, сфера обслуговування.
Зі зростанням інформації зростає і її неповнота. Підприємства вирішують цю проблему залучивши додаткову інформацію за вільні кошти.
Під час планування діяльності неповну інформацію і шляхи її усунення слід враховувати у альтернативних платах.
У зв’язку з неповною інформацією для багатьох підприємств є характерне : маневреність дій, рівень гнучкості високий.
8.2. Активна, консервативна та змішана модель поведінки підприємства
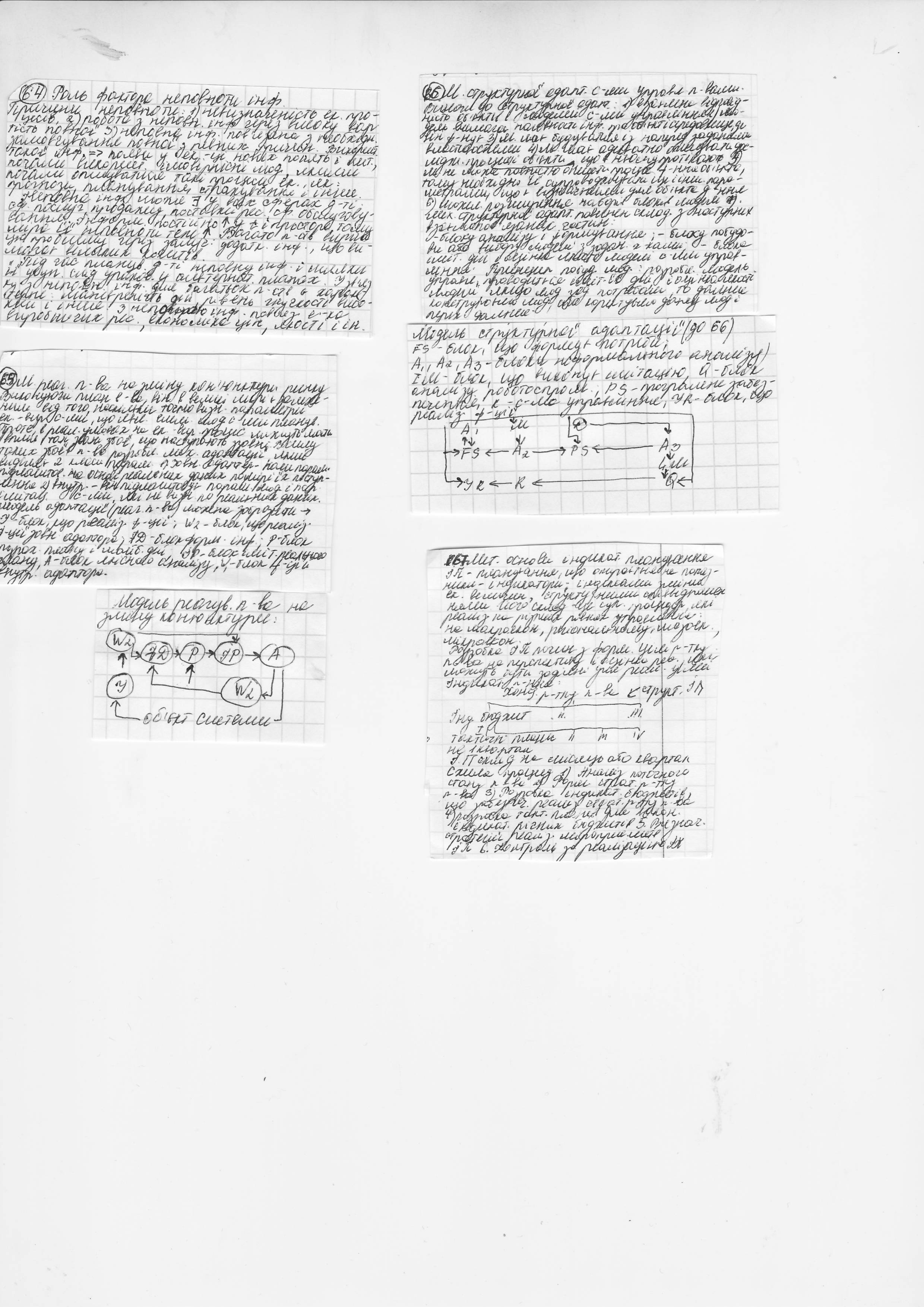
8.3. Модель реагування фірми і галузі на зміну кон’юнктури ринку
Здійснюючи план виробництва, потрібно пам’ятати що план у великій мірі залежний від того наскільки точно визначені параметри економіко-виробничої системи. Проте в реальних умовах економіко виробниче планування може в тій чи іншій мірі мати вплив так звані «збої», що наступають ззовні. В силу таких збоїв підприємство розробляє механізми адаптації , які виділяють два класи параметрів:1 зовнішня адаптація – коли параметри підлаштовуються на основі реальних даних по мірі їх поступлень 2.внутрішні – підлаштовуються параметри моделі і параметри імітаційної системи, які не визначені по реальних даних.
Модель адаптації (реагування підприємства) можна зобразити наступним чином: y –блок що реалізує функції, w2 – блок що реалізується імітації зовнішнього адаптера, ID – блок форми інформації, P – блок плану і майбутніх дій, IP – блок імітації реального плану, A – блок якісного аналізу, W – блок функції внутрішнього адаптера.
8.4. Модель структурної адаптації системи управління підприємства
При
побудові систем управління основна
увага приділяється принципу зворотного
зв'язку. Зв'язок між виходом і входом
тої ж самої системи керування називається
зворотнім зв'язком. Зворотний зв'язок
може здійснюватися, або безпосередньо
від виходу системи до її входу, або через
ще якісь інші допоміжні елементи. Зв'язок
між виходом і входом системи називається
зворотним тому, що передача дії спрямована
в сторону, протилежну до напрямку
передачі основної дії. Він дозволяє
зрозуміти явища, які відбуваються в
керуючих системах різної природи, адже
зворотній зв'язок можна виявити в живих
організмах, в економічних структурах,
в системах автоматичного регулювання
і т.д. Структурну схему системи управління
можна представити у вигляді, рис. 1., де
![]() -
вектор дій, що управляє, впливає на
систему;
-
вектор дій, що управляє, впливає на
систему;
![]() - вектори збурень, що діють відповідно
на об'єкт і регулятор.
- вектори збурень, що діють відповідно
на об'єкт і регулятор.

Рис. 1. Структурна схема системи управління
Знак
запитання на рис. 5.3 означає, що регулятор
необхідно синтезувати так, щоб в системі
виконувалися задані вимоги на рух
об'єкту, наприклад, щоб між виходом
об'єкту
![]() і дією, що управляє
підтримувалося співвідношення вигляду:
і дією, що управляє
підтримувалося співвідношення вигляду:
![]() (1)
(1)
із заданим ступенем точності, не дивлячись на дію невиміряних збурень . При цьому для вирішення даного завдання потрібне знання математичної моделі (ММ) об'єкту. Математи́чна модель — система математичних співвідношень, які описують досліджуваний процес або явище. Математична модель кожного об’єкта (процесу, явища) містить у собі три групи елементів: 1) характеристику об’єкта, який потрібно визначити (невідомі величини), — вектор Y = (yj); 2) характеристики зовнішніх (щодо модельованого об’єкта) умов, які змінюються, — вектор X = (xj); 3) сукупність внутрішніх параметрів об’єкта — A.