

15. Определение показателей качества регулирования скорректированной сау
По кривой представленной на рис. 10 определим время регулирования.
Для
этого на кривой отмечаем
от
,
и проводим линии параллельные оси
абцис. На пересечении кривой и нижней
линии получаем точку это и есть время
регулирования
 .
На рис. 11 представлена часть кривой
переходного процесса.
.
На рис. 11 представлена часть кривой
переходного процесса.
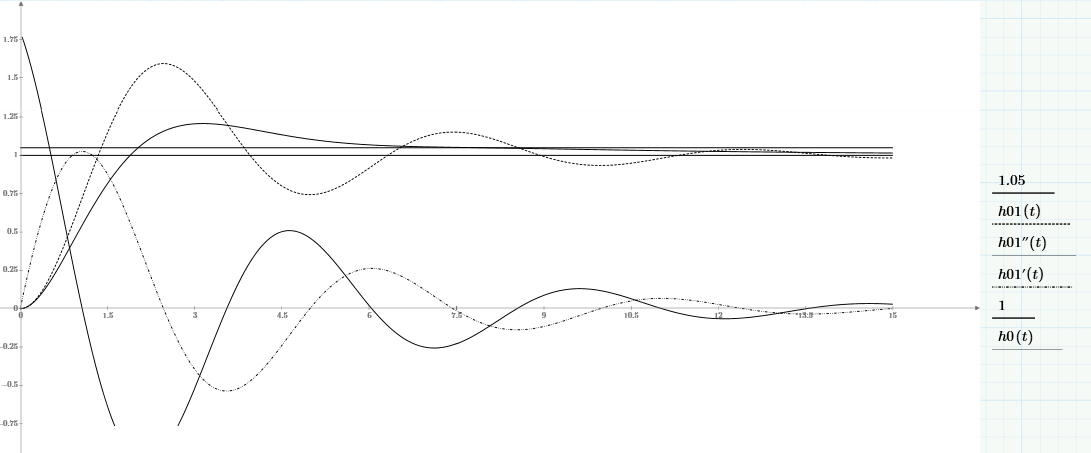
По кривой представленной на рис.11 определяем максимальное ускорение .
Получим максимального ускорения найдя значение максимума второй производной переходного процесса

Для определения перерегулирования воспользуемся формулой:
 ,
получим что
,
получим что

t,c
рис. 11 кривая в программе переходного процесса скорректированной, первая и вторая производная и график нескорректированной системы.
Заключение
Целью данной курсовой работы являлось выполнение анализа и синтеза заданной системы автоматического управления.
В ходе выполнения курсовой работы мы получили желаемую логарифмическую амплитудно-частотную характеристику, удовлетворяя-ющую нашим требуемым статическим и динамическим характеристикам. В соответствии с этим определили ЛАЧХ корректирующего звена и соответствующую ей передаточную функцию.
Таким образом, мы скорректировали данную систему и этим улучшили её статические и динамические характеристики, о чём свидетельствуют показатели качества регулирования скорректированной САУ
Список использованных источников
1. Первозванский А.А. Курс теории автоматического управления: Учеб. пособ. – М.: Наука. Гл. ред. физ.-мат. лит., 1986.‒616 с.
2. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. Учебное пособие для вузов. – М.: Машиностроение, 1985. – 536 с., ил.
3. Шавров А.В., Коломиец А.П. Автоматика. – М.: Колосс, 1999. – 264 с.: ил.
4. Юсупов Р.Х., Шеповалова Л.Н. Автоматика. Методические указания по выполнению курсовой работы. – М.: ФГОУ ВПО МГАУ, 2007. – 72 с.