

§ 6.3. Сложение пар
Если в одной плоскости действует несколько пар, то их можно заменить одной парой, момент которой равен суме моментов этих пар (рис.6.5).
Пусть на твёрдое тело в одной плоскости действуют две пары F1 F'1; F2 F́′2; F1=3kH, F2=4kH; h1=300мм; h2=400мм. Требуется определить равнодействующую пару, с плечём h= 200 мм.
Согласно, свойства эквивалентности пар заменим наши пары новыми парами, которые имеют общее плечо h=200мм.
М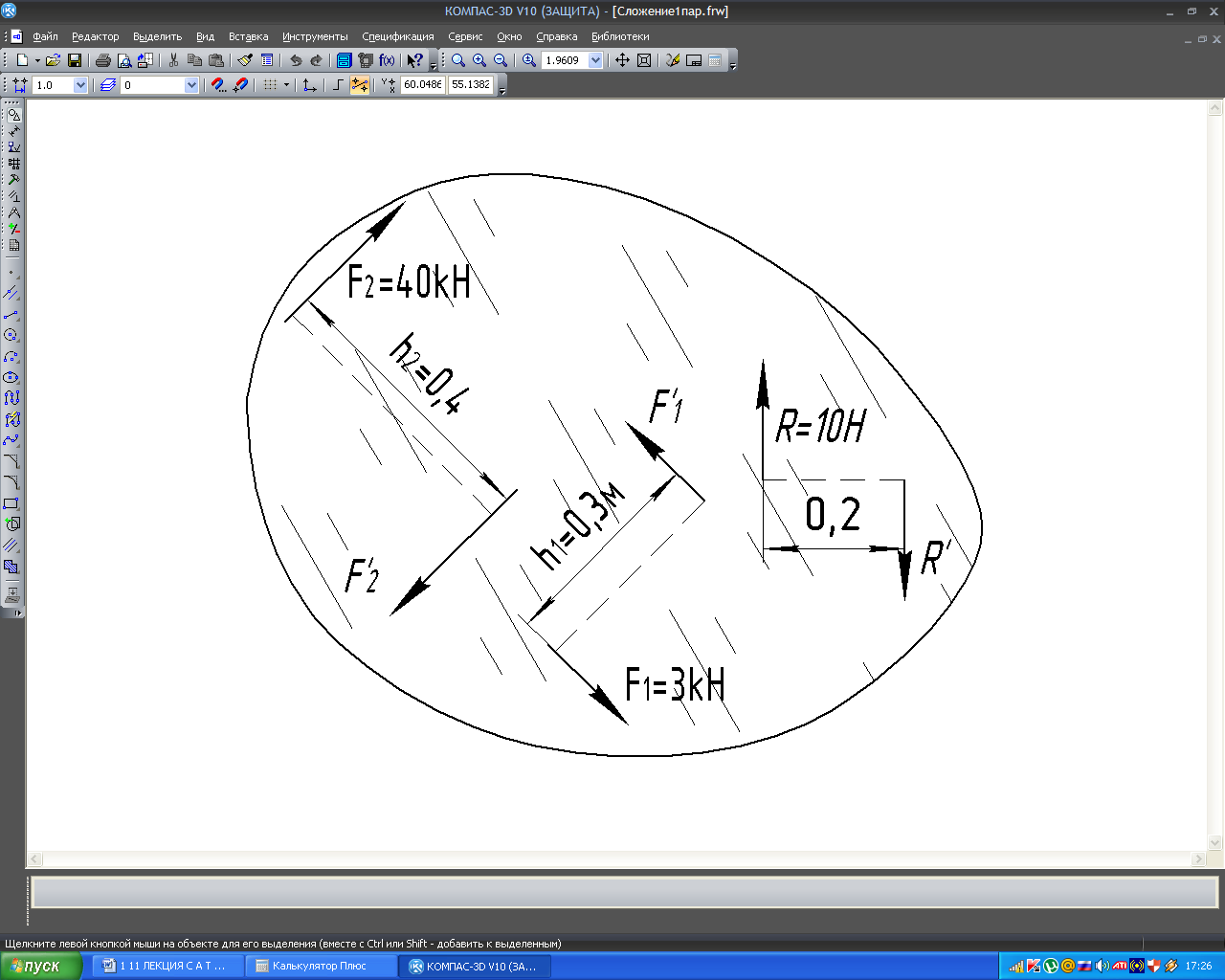 1=F1·h1=3·0,3=0,9
kH·м;
М2=F2·h2=4·0,4=
1,6 kH·м.
1=F1·h1=3·0,3=0,9
kH·м;
М2=F2·h2=4·0,4=
1,6 kH·м.
Определим модули сил с плечом h:
Модуль равнодействующей пары:

Рис.6.5
Вращение
эквивалентной пары по часовой стрелке.

МЭ= R h = 3,5 ∙ 0,2 = 0,7 kН·м.
Момент равнодействующей пары равен алгебраической сумме моментов слагаемых пар.
Если под действием нескольких пар твёрдое тело находится в равновесии, то такие пары при их сложений не дают равнодействующей пары, т.е. эти пары взаимно уравновешиваются. Отсюда следует вывод, что для равновесия пар необходимо и достаточно, чтобы алгебраическая сумма моментов пар равнялась нулю.
Сумма проекций сил пары на любую ось равна нулю, поэтому пара сил не имеет равнодействующей.
Для равновесия плоской системы пар необходимо и достаточно, чтобы алгебраическая сумма моментов данных пар равнялась нулю.
∑МК = 0.
§ 6.4. Условия равновесия пар сил и моментов
Известно, что тело получает вращательное движение, если приложенные силы создают момент относительно возможной точки вращения. Если моменты сил, стремящиеся вращать тело в обратном направлении, окажутся равными моментам сил, то тело остаётся в равновесии.
Следовательно, для равновесия тела под действием пар сил и моментов необходимо, чтобы алгебраическая сумма моментов всех пар и моментов была равна нулю.
Пример 9.1. На 2х-колодочный тормоз действуют нормальные силы N=10кН (рис.6.6). Определить какой груз F может удерживать тормоз, если Д1 =160 мм, Д2 =250 мм. Коэффициент трения f=0,4.
К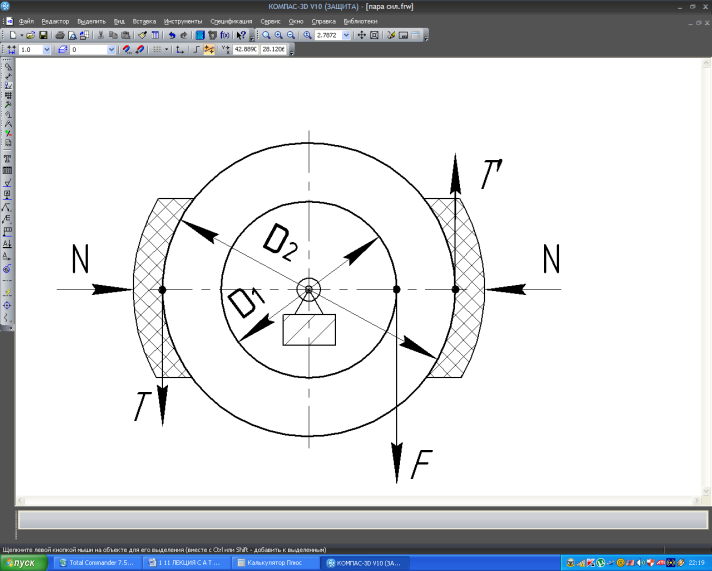 оэффициент
трения f=Т/N.
оэффициент
трения f=Т/N.
Т-сила трения, N-нормальные силы, прижимающие колодки к барабану.
Сила трения Т=fN=0,4·10=4 kH.
Сила трения Т создаёт пару сил ТТ ':
МТ = Т ∙ Д2=4·0,25=1кН·м.
Рис.6.6
Уравнение равновесия:

Пример 9.2. На концы консолей (консолью называется часть балки, выступающая за опору) балки (рис.6.7) действуют две параллельные силы
F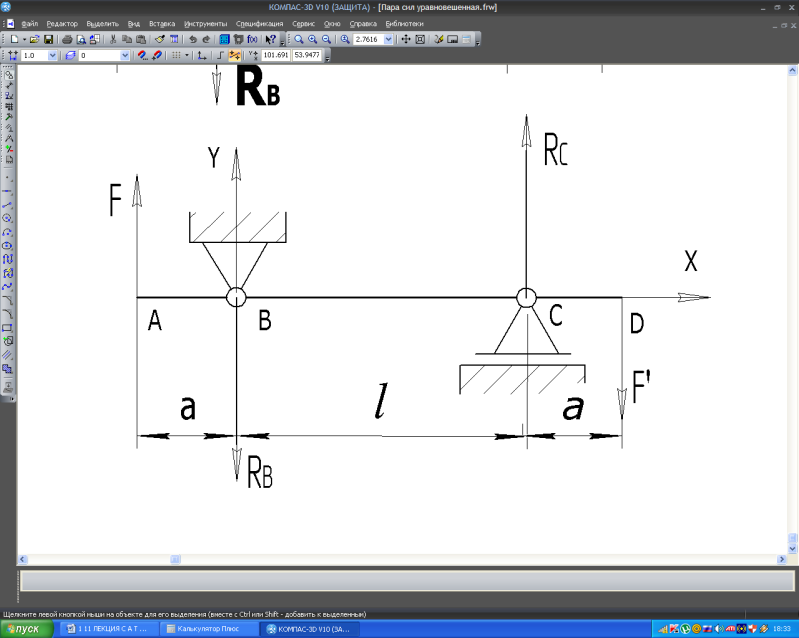 = F
= 10кН, причём сила
= F
= 10кН, причём сила
F – направлена вверх, а сила F - вниз. Определить реакции опор балки, пренебрегая её весом, если пролёт балки l = 2 м и длина каждой консоли, а = 1 м.
На данную балку действует пара сил FF, стремящаяся повернуть балку по часовой стрелке.
Рис.6.7
Момент этой пары :М = -F(l +2a) = -104 = - 40 к∙Нм.
Пара сил создаёт давления на опоры В и С. Если убрать, например опору В, то мы должны приложить силу, равную силе давления и направленную в обратном направлении Rв. Эта сила называется реакцией связи или реакция опоры (более подробно будет рассматриваться ниже).
Пара сил может быть уравновешена парой, имеющий момент, равный по величине и обратный по знаку моменту данной пары.
Чтобы система сил находилась в равновесии, нужно пару сил уравновесить:
М + МR = - F(2a+l) + (Rвl):2 = 104 - 202 = 0. RB=RC.