

Система автоматичного регулювання термічної обробки напівкопчених ковбас.
-
Процес
Температура в камері, °С
Відносна вологість у камері, %
Підсушування, обсмаження
95...97
12...15
Варіння
82...84
90
Коптіння
40...45
60
Схема автоматизації камери для термічної обробки ковбасних виробів передбачає автоматизацію повного циклу обробки з централізованим контролем зі щита. Динамічна характеристика термокамери дозволяє застосувати позиційний закон регулювання.
У схемі автоматизації термокамери (рис. 3.1) передбачається: контроль тиску пари, що поступає на зволоження; контроль, реєстрація, регулювання температури та вологості; дистанційне управління заслінками; автоматична сигналізація та блокування.
Контроль тиску пари, що поступає у камеру на зволоження, а також у калорифер для обігріву, здійснюється манометрами 1-1 та 2-1.
Контроль, реєстрація та автоматичне регулювання температури в камері І в процесі підсушування, обсмаження та коптіння проводиться автоматичним мостом 8-3 типу КСМ-2 у комплекті з термометром опору 8-1 типу ТСП-5П і термометром 8-2 типу ТСМ-10М, установлених у камері. За різницею температур мокрого 8-2 і сухого 8-1 термометрів визначають вологість пароповітряної суміші в камері. З відхиленням температури та вологості від заданих значень позиційний регулюючий пристрій моста замикає коло електричних виконавчих механізмів: 5-2, розміщеного на паропроводі подачі пари в калорифер Ш, 6-2, установленого на паропроводі подачі пари у зволожувач VI, і замикаючого клапана 7-2 з електромагнітним приводом.
Крім того, автоматичне регулювання температури в камері може відбуватися за температурою усередині батона. Сигнал від голчастої термопари 11-1, що знаходиться всередині батона, надходить до потенціометра 11-2 типу КСП-2 з трьохпозиційним регулюючим пристроєм, який керує виконавчими механізмами 5-2, 6-2, 7-2.
Термічну обробку можна проводити за часом (для варених ковбас). Для цього використовується програмне реле часу 10-1.
Зі щита управління передбачається дистанційне управління електродвигуном заслінок викиду газової суміші з термокамер (12-2), подачі повітря в термокамеру (13-2), подачі диму (14-2) за допомогою кнопок 12-1, 13-1 та 14-1 відповідно. Лампи НL7…НL2 сигналізують про роботу електродвигунів.
Дистанційне управління виконавчими механізмами 5-2, 6-2, 7-2 може здійснюватись за допомогою кнопок 5-1, 6-1, 7-1. Автоматична сигналізація роботи цих механізмів виконується сигнальними лампами НLЗ...НL6.
У схемі застосовується автоматичне блокування подачі пари в термокамеру під час відчинення дверей IV: за допомогою кінцевих вимикачів 16-1 та 16-2 виконавчі механізми 5-2, 6-2 та 7-2 закривають подачу пари в калорифер та в камеру зволожування, а також воду в зволожувач.
Звуковий сигнал після закінчення процесу подає зумер НА1, який вимикається за допомогою кнопки 15-2.
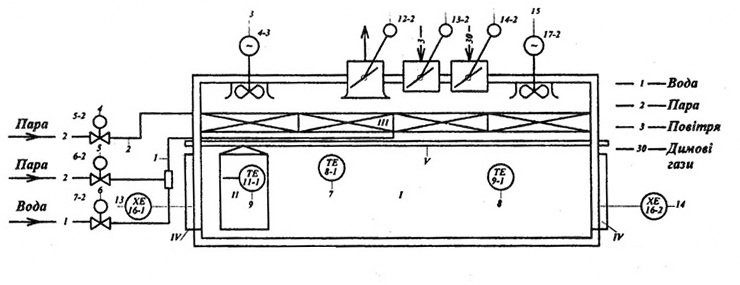
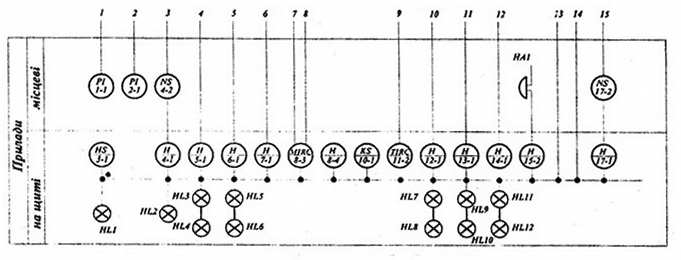
Рис. 3.1. Схема автоматизації термічної обробки ковбасних виробів
Обґрунтування основних умов стійкості САР і дослідження її
на стійкість
Поняття стійкості автоматичних систем .
В процесі функціонування будь-якої системи змінюються властивості та параметри технічних пристроїв, які входять до них (наприклад, внаслідок старіння та зносу). Крім того, на автоматичні системи постійно діють різні, заздалегідь невідомі, збурення. Ці обставини можуть привести до неправильної роботи автоматичного регулюючого пристрою і, як наслідок, до порушень в функціонуванні об'єкту регулювання. Щоб цього не відбулося, автоматична система повинна бути запроектована спеціальним чином і володіти специфічною властивістю - стійкістю.
Автоматична система вважається стійкою, якщо вона протистоїть дії збурення, а будучи виведеною з усталеного стану деякою причиною, повертається в початковий стан після припинення дії цієї причини. В стійкій системі малі зміни вхідного сигналу або деякого збурення початкових умов або параметрів не можуть привести до значних відхилень вихідного сигналу, а виникаючі в автоматичній системі перехідні процеси з часом згасають.
У рамках теорії автоматичного керування автоматичної системи досліджуються шляхом аналізу їх математичних моделей. Математичну модель лінійних стаціонарних систем можна представити диференціальним рівнянням системи.
Достатньо загальним описом математичні моделі лінійної системи є лінійне диференціальне рівняння виду:
 (4.1)
(4.1)

де

У
випадку, якщо система не тільки лінійна,
але й стаціонарна (коефіцієнт
 та
та
 не
залежить від часу, є константами),
рівняння (4.1)
приймає
не
залежить від часу, є константами),
рівняння (4.1)
приймає
вигляд:
 (4.2)
(4.2)

У деяких випадках рівняння (4.2) записують у скороченій формі:
 (4.3)
(4.3)
Відомо також, що рішення цього диференційного рівняння можна представити у вигляді суми загального рішення однорідного рівняння та часткового рішення неоднорідного рівняння. Іншими словами, вихідний сигнал лінійної стаціонарної системи можна представити співвідношенням:
Y(t)= Yb(t) + Y3(t), (4.4)
де Yb(t) - вільна складова вихідного сигналу автоматичної системи, яка уявляє собою реакцію автоматичної системи на нульові початкові умови при X(t)= 0;
Y3(t)- змушена складова вихідного сигналу, яка уявляє собою реакцію автоматичної системи, яка знаходиться у момент вмикання у стані спокою, на вхідний сигнал Х(t).
Зрозуміло, що стійкість системи треба розглядати як внутрішню властивість системи. Властивість незалежну від того, знаходиться система в збудженні чи спокої. Властивість, яка залежить тільки від структури та , параметрів автоматичної системи, але не від зовнішніх збурень. Тому поняття стійкості треба відносити до власних збуджень системи, які породжуються початковими умовами та збуреннями. Відповідно до такого підходу лінійну стаціонарну автоматичну систему треба вважати стійкою, якщо для будь-яких нульових початкових умов вільна складова її вихідного сигналу Ув(t) з часом наближається до нуля.