

С одержание
одержание
1. Постановка задачи проектирования РТК |
3 |
2 Выбор технологического оборудования |
4 |
3 Выбор структуры комплекса |
8 |
4 Определение временных параметров работы комплекса |
11 |
5 План размещения оборудования |
12 |
6 Моделирование |
13 |
7 Список используемой литературы |
16 |
|
|
|
|
|
|
|
|
|
|
|
|
П остановка задачи проектирования ртк.
Сформировать структуру роботизироного комплекса:
Два токарных станка.
Два изделия:
1-ое (40,200 мм) с одной установки,
2-ое (60, 120 мм) делается с двух установок.
Два входа в системе.
Один выходной накопитель.
2 . Выбор технологического оборудования.
Для автоматизации возьмём участок технологической линии по производству валов двигателя. Данный технологический участок имеет в своём составе два токарный станок 16К20Ф3 и один робот ТУР-10, общий накопитель (готовых деталей), два раздельных накопителя (заготовок деталей).
Функционирует участок следующим образом:
1. Со складского комплекса в накопители поступают заготовки.
2. Робот берёт заготовку из одного накопителя (для первого станка) и вставляет в первый станок.
3. Первый станок производит обработку заготовки.
4. Робот берёт заготовку из другого накопителя и вставляет во второй станок.
5. Второй станок производит обработку заготовки.
6. Робот снимает полученную деталь с первого станка и кладет в общий накопитель.
7. Робот снимает полученную деталь с второго станка и кладет в общий накопитель.
Накопитель представляет собой транспортно-приёмное устройство, связанное с роботизированным складским комплексом.
Токарный станок предназначен для обработки наружной поверхности прямого или криволинейного характера за один или несколько рабочих ходов.
Технические характеристики станка:
Наибольший диаметр обрабатываемого изделия 220 мм.
Наибольшая длина устанавливаемого изделия, при установке в церах: 1000 мм.
Наибольшая длина обработки: 905 мм.
Частота вращения шпинделя, устанавливаемого в ручную:
1 диапазон 20 – 395 об/мин
2 диапазон 63 – 900 об/мин
3 диапазон 160 – 2240 об/мин.
Пределы программируемых подач:
продольных 0,01 – 40 мм/об
поперечных 0,005 – 20 мм/об.
Максимальная (максимально рекомендуемая) скорость подачи:
продольной 2000 мм/мин (2,8 мм/об)
поперечной 1000 мм/мин (1,4 мм/об).
Скорость быстрых ходов, не менее:
продольных 7500 мм/мин
поперечных 5000 мм/мин.
Дискретность перемещений:
продольных 0,01 мм
поперечных 0,005 мм
П
 ределы
шагов нарезаемых резьб: 0,01 – 40,95 мм.
ределы
шагов нарезаемых резьб: 0,01 – 40,95 мм.Количество позиций автоматической поворотной головки: 6
Наибольший крутящий момент на шпинделе: 1000 Н*М.
Предельные параметры сверления:
по чугуну 28 мм
по стали 25 мм
Габариты станка (без УЧПУ), не более 3250 * 1700 * 2145 мм
Масса станка (без УЧПУ), не более 3800 кг.
Общий вид станка 16К20Ф3 приведен на рисунке 1.
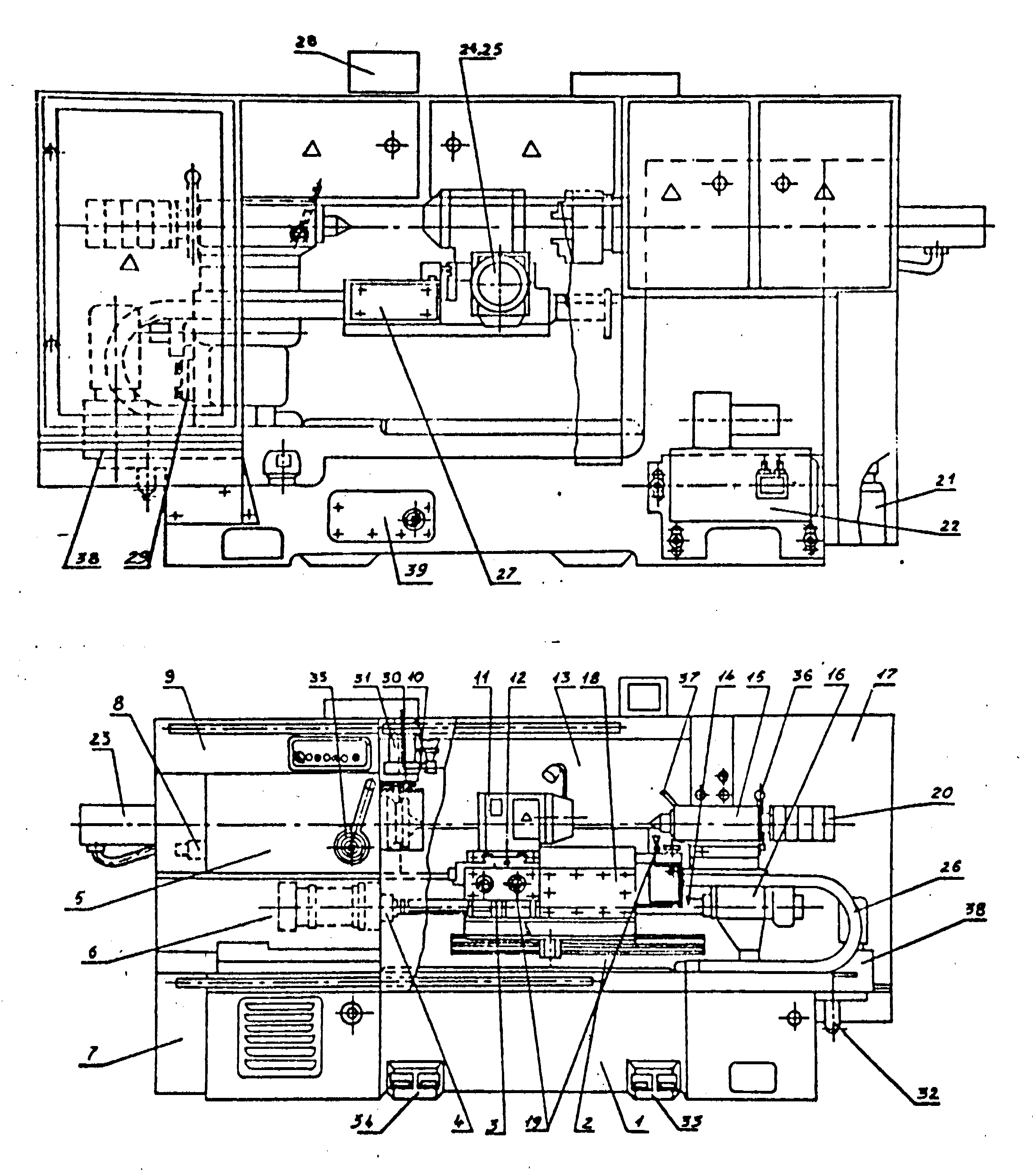
Рисунок 1 - Общий вид станка 16К20Ф3
1 – основание
– основание
2 – станина
3 – каретка
4 – опора левая винта продольного перемещения
5 – бабка шпиндельная
6 – привод продольного перемещения
7 – ограждение шкивов неподвижное
8 – привод датчика резьбонарезания
9 – шкаф электро-автоматики
10 – ограждение подвижное
11 – головка автоматическая универсальная (АПГ)
12 – винтовая шариковая пара поперечного перемещения
13 – шкаф электро-автоматики
14 – винтовая шариковая пара продольного перемещения.
15 – бабка задняя
16 – опора продольного винта правая
17 – шкаф электроприводов
18 – пульт управления ЧПУ
19 – пульты ручного управления
20 – электромеханический привод пиноли 3Б
21 – система централизованной смазки
22 – установка моторная
23 – патрон механический с эл.мех.приводом
24 – привод поперечного перемещения
25 – редуктор поперечной подачи
26 – подвижный металлорукав подвода эл. проводов
27 – коробка подвода
28 – дисплей
29 – гидропанель
30 – ограждение патрона с обдувом кулачков
31 – привод перемещения ограждения
32 – узел подготовки воздуха
33-34 – педали управления эл.мех.головками
35 – рукоятка переключения диапазонов частот
36 – рукоятка зажима задней бабки
37 – рукоятка зажима пиноли
38 – станция смазки каретки
39 – крышка резервуара
Робот предназначен для выполнения различных операций при проведении опытных исследовательских работ по автоматизации машиностроения в серийном производстве.

Рисунок 2
Основные характеристики робота (рисунок 2): |
||
Характер выполняемых операций |
вспомогательная (манипулирование деталями) |
|
Степень специализации |
специализированный |
|
Системы основных координатных перемещений |
сферическая |
|
Мобильность |
стационарный |
|
Конструктивное исполнение |
на платформе |
|
Максимальный вертикальный ход руки |
400 мм |
|
Максимальный угол поворота плеча |
200 град |
|
Максимальный угол поворота локтя |
140 град |
|
Максимальный угол поворота схвата |
+180 град |
|
Максимальная скорость вертикального перемещения руки |
0,5 м/с |
|
Максимальная скорость вертикального перемещения поворота плеча |
90 град/с |
|
Максимальная скорость вертикального перемещения поворота локтя |
120 град/с |
|
Область применения по виду производства, обслуживание линий металлорежущих станков с программным управлением; |
||
Техническая характеристика робота ТУР – 10
|
||
Число степеней подвижности |
5 |
|
Грузоподъемность |
10 кг |
|
Точность позиционирования |
+/- 0.2 мм |
|
Тип управляющего устройства |
позиционное |
|
Объем оперативной памяти |
100 кадров |
|
Число одновременно управляемых движений |
5 |
|
Потребляемая мощность |
4 кВт |
|
Масса манипулятора |
230 кг |
|
Тип привода |
электрический |
|