

2.2 Моделирование схемы амплитудного манипулятора с идеализированным источником несущего колебания
Моделируемая схема амплитудного манипулятора с активной паузой приведена на рисунке 2.1.
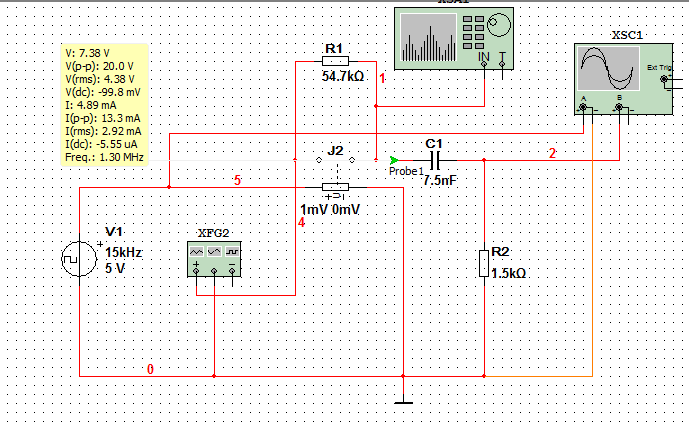
Рис. 2.1 Схема амплитудного манипулятора с активной паузой
Источник несущей частоты - генератор синусоидального колебания с установленной частотой, согласно заданию 1300 кГц и амплитудой 5 В. Источник манипулирующего сигнала - генератор сигналов импульсной синусоидальной формы с параметрами(рис.2.2) частота - 13 кГц, амплитуда
0,5 В.
В качестве нелинейного элемента в схеме применен управляемый ключ. Через контакт этого ключа в сопротивление нагрузки манипулятора транслируется высокочастотный сигнал частей несущего колебания.
Управление ключом производится от генератора манипулирующего сигнала прямоугольной формы (на схеме ключ обозначен в виде управляемого напряжением резистора и контакта).
Включенный конденсатор в последовательной цепи передачи высокочастотного модулированного сигнала через контакт ключа в нагрузку выполняет роль разделительного.
Осциллограмма моделируемой схемы манипулятора с идеальным источником несущего колебания, показана на рисунке 2.3

Рис. 2.3 Осциллограмма моделируемой схемы манипулятора
Как видно из осциллограммы, при отсутствии информационного сигнала – «0», на выходе получаем сигнала амплитудой 0.5В. При наличии


2.3.2 Спекр выходного сигнала
Из спектра сигнала видно что несущая частота 1498 кГц, а боковые равны: нижняя 1486 кГц (левая), а верхняя 1513 кГц (правая).
То есть мы получили Fм1=1500-1486=14 кГц (слева от несущей). Fм2=1513-1500=13 кГц.
В результате моделирования получили амплитудный манипулятор с активной паузой, который удовлетворяет условию задания:
- частота несущего сигнала fн = 1500кГц;
- частота информационного сигнала Fм= 15кГц;
- обеспечивается активная пауза.
2.3 Моделирование схемы амплитудного манипулятора с автогенератором
Манипулятор может быть реализован без функционального генератора несущего колебания.
В этом случае в качестве генератора манипулирующего сигнала остается моделируемый функциональный генератор, а генератор несущего сигнала заменяется разработанным ранее индуктивным трехточечным автогенератором.
Полученный амплитудный манипулятор подключаем к разработанному автогенератору.

Рис. 2.4 Конечная схема передатчика

Рис. 2.5 Осциллограмма выходного и манипулирующего сигнала.
Проверим частоту модулирующего сигнала на спектральной характеристики АМ сигнала рис 2.6
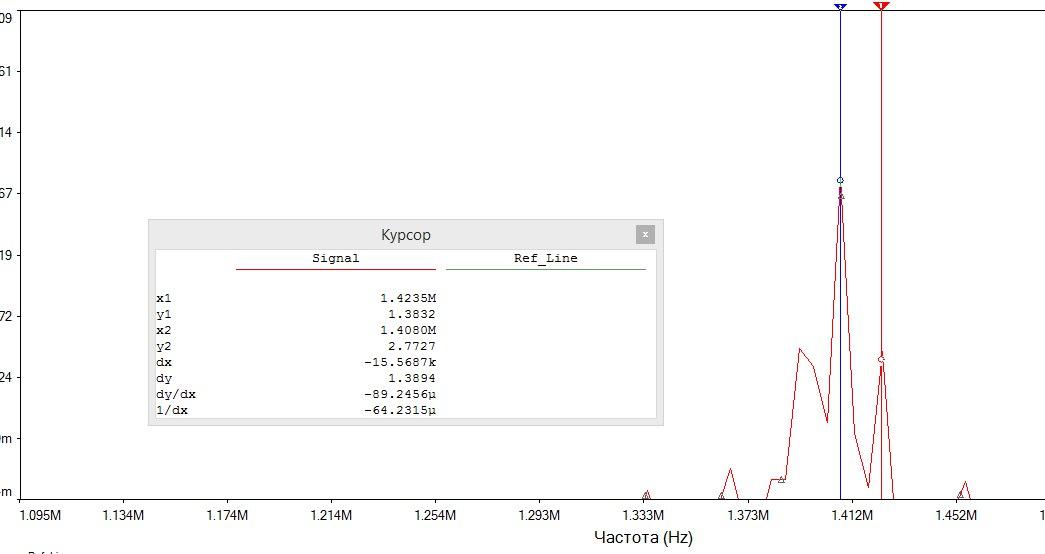
Рис. 2.6 Спектральная характеристика полученного АМ сигнала
Из спектра сигнала видно что несущая частота 1408 кГц, а боковые равны: нижняя 1392 кГц, а верхняя 1423 кГц.
2.4 Анализ результатов моделирования
В результате моделирования был разработан амплитудный манипулятор сигналов со следующими параметрами:
-
Частота несущего колебания F=1498 кГц (1500 кГц по заданию);
-
Частота манипулирующего сигнала Fм=15 кГц;
-
Уровень логического нуля 0.5 В;
-
Уровень логической единицы 18.898 В (≥ 5В по заданию).
ВЫВОДЫ
Смоделированный амплитудный манипулятор с пассивной паузой удовлетворяет поставленным требованиям. Передатчик, полученный в результате каскадного соединения автогенератора и манипулятора, работает стабильно, что видно из осциллограммы его работы. Небольшие отклонения, которые составляют не более 3%, обусловлены неточностями значений элементов при выборе в стандартной библиотеке Multisim при моделировании, и возникающими на высоких частотах паразитными емкостями и индуктивностями.