

микропроцессорные системы управления движением поездов на станциях / лабораторные / микропроцессорные
.docxФедеральное государственное бюджетное образовательное учреждение высшего образования
«Российский университет транспорта (МИИТ)»
Институт транспортной техники и систем управления
_________________________________________________________________
Кафедра "Автоматика и телемеханика на железнодорожном транспорте"
Лабораторная работа №1
По дисциплине «Микропроцессорные системы управления движением поездов на станциях»
на тему:
«Микропроцессорная централизация Ebilock»
Проверил: ст. преподаватель
Васильев А.Ю.
ассистент
Горлин И.Г.
Москва-2017
Цель работы: ознакомиться с устройством МПЦ Ebilock, изучить комплекс аппаратно-программных средств, требования к системам МПЦ и их техническая реализация.
Назначение и основные требования к системам МПЦ
Ebilock 950 предназначен для автоматизированного управления напольными объектами-стрелками, светофорами, переездами и т.п. – на железнодорожных станциях с целью организации движения поездов средствами современной микропроцессорной техники.
Требования по информации для ДСП:
- контроль положения стрелок;
-контроль свободности и занятости стрелочных секций, путей, участков путей;
-контроль подходов станции; районов станции и объектов, переданных на местное управление;
-контроль неисправного состояния объектов;
-контроль установленного маршрута, проследования поезда по этому маршруту и работы всех устройств, включенных в него;
-контроль состояния перегона, переездной сигнализации и устройств контроля состояния подвижного состава.
Требования к аппаратным средствам МПЦ:
-аппаратные средства должны включать в себя постовое оборудование, напольное оборудование и кабельные линии связи;
-постовое оборудование должно включать сдвоенный модуль процессора централизации, АРМ ДСП, АРМ ШН;
-сдвоенный модуль центрального процессора должен осуществлять прием информации, поступающей от напольных устройств и оператора МПЦ, обработку полученной информации в соответствии с принятым алгоритмом функционирования МПЦ, передачу информации на АРМ оператора и в напольные устройства МПЦ, организовывать протоколы обмена информации с напольными устройствами МПЦ;
-модуль центрального процессора должен иметь 100% горячий резерв и автоматическое переключение на резервный модуль при неисправностях основного модуля;
-работа ЦП должна осуществляться циклически, время цикла не больше 0,6 сек.;
-модуль ЦП должен иметь собственную автономную систему электропитания, которая должна включаться автоматически при пропадании основного питания и поддерживать работу модуля ЦП в течение не менее 30 минут;
-АРМ оператора МПЦ должно обеспечивать интерфейс человек-система МПЦ и давать возможность оператору определять состояние объектов управления и контроля, вводить необходимые приказы, протоколировать работу системы МПЦ и оператора;
-протоколирование результатов работы системы и действий оператора должно осуществляться за смену и архивироваться на ГМД (гибких магнитных дисках) или других носителях с сохранением в течение не менее 1 года.
Требования по управлению электроприводом:
-управление ЭП должно обеспечивать перевод объекта из минусового положения в плюсовое и наоборот;
-должна быть предусмотрена возможность возврата объекта в первоначальное положение при любом его положении, включая недоход стрелки до своего нормального положения, по команде оператора. На станциях с диспетчерским управлением должна быть предусмотрена возможность автоматического возврата стрелки в первоначальное положение при ее недоходе, повторного перевода и возврата в первоначальное положение при недоходе требуемого;
-управление спаренными стрелками;
-поочередный перевод стрелок;
-при занятости стрелочной секции при переводе стрелки, стрелка должна быть переведена до конца;
-защита он ложного контроля положения объекта при перепутывании проводов, от появления ложной информации о положении объекта при произвольном замыкании контрольных проводов и снижении сопротивления изоляции кабеля.
Структурная схема МПЦ и функциональное описание основных подсистем
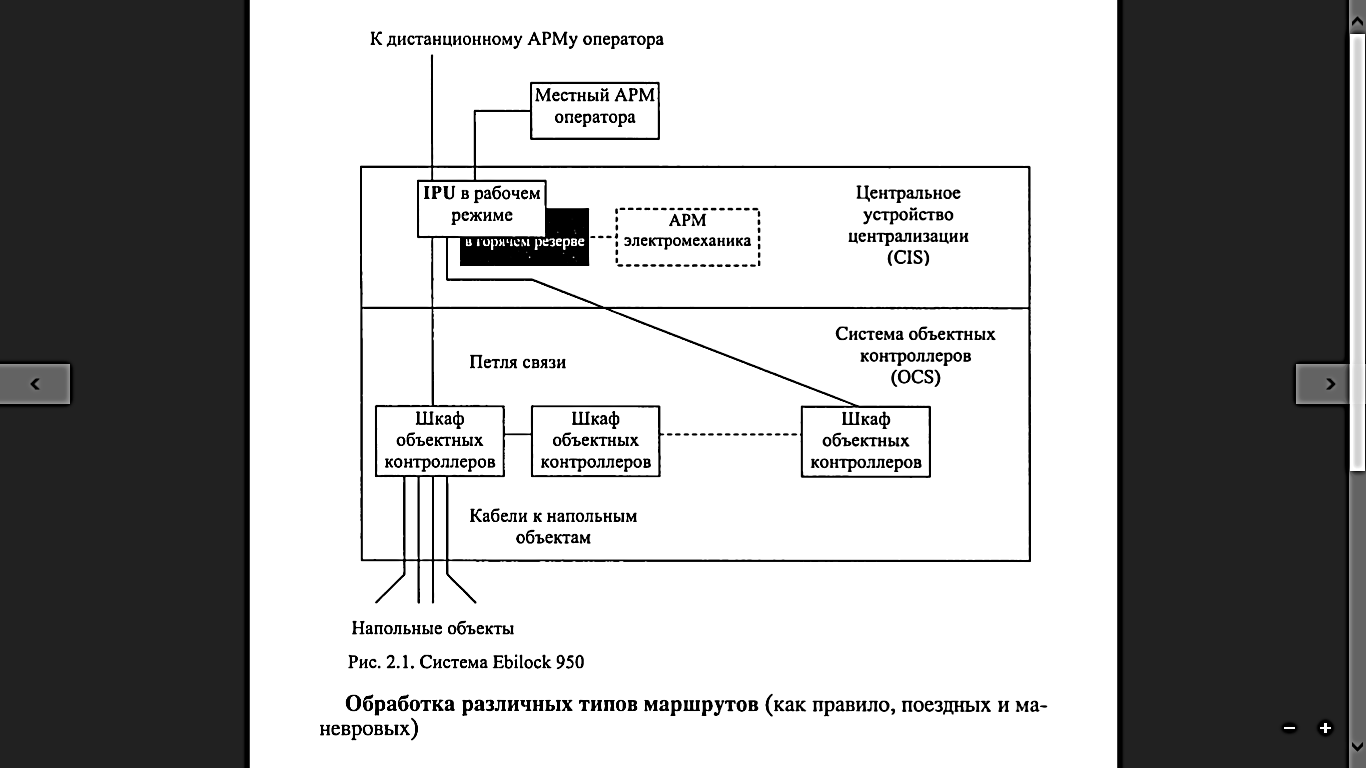
Структура компьютера централизации приведена на рис.8.2. С точки зрения функционального назначения в системе Ebilock-950 можно также выделить четыре основных подсистемы:
-
диалоговая подсистема;
-
подсистема диагностики;
-
подсистема логических зависимостей;
-
подсистема управления и контроля состоянием объектов.
В состав диалоговой подсистемы входит автоматизированное рабочее место дежурного по станции (АРМ ДСП). Основными функциями АРМа являются: отображение путевого развития станции с индикацией текущего состояния объектов контроля и управления; обработка команд дежурного по станции; регистрация событий; обработка сигналов о неисправностях; отображение журнала событий и списка неисправностей.
Применение стандартного персонального компьютера в качестве аппаратной реализации АРМ позволяет снизить стоимость и упростить эксплуатацию и обслуживание системы МПЦ. Программное обеспечение АРМ функционирует под управлением операционной системы Windows NT. В АРМ использован широко распространенный оконный интерфейс пользователя, интуитивно понятный и легкий для освоения.
Подсистема диагностики в системе Ebilock-950 представлена в виде терминал электромеханика (АРМ механика), на который поступает информация о различных неисправностях в системе, например, обрыв петли связи или перегорание лампы в светофоре. Пользовательский интерфейс и общие принципы построения АРМ дежурного по станции и дежурного электромеханика во многом схожи. В АРМе дежурного электромеханика сокращен набор допустимых команд и отсутствует окно, отображающее мнемосхему станции.
Реализация логических взаимозависимостей между станционными объектами в соответствии с требованиями безопасности движения поездов осуществляется на уровне подсистемы логических зависимостей. Технической основой это подуровня системы МПЦ является процессорный модуль централизации (ПМЦ), структура аппаратного и программного обеспечения которого, обеспечивает заданные параметры безотказности и безопасности. ПМЦ состоит из двух компьютеров, один из которых находится в работе, а другой в «горячем резерве». В состав каждого компьютера входят два аппаратных канала обработки информации. Все функции, к которым предъявляются требования по безопасности реализуются в двух независимых вычислительных каналах. Функции, связанные с обеспечением интерфейса с внешними устройствами и системой объектных контроллеров, реализует сервисный процессор.
Компьютер, который находится в состоянии «горячего резерва», постоянно актуализирует данные, поэтому существует готовность системы перейти на резервный канал обработки в случае отказов или сбоев в основном канале обработки информации.
Для непосредственного контроля и управления станционными объектами (стрелки, светофоры, рельсовые цепи и т.д.) служит система объектных контроллеров.
Каждый объектный контроллер может управлять и контролировать один или несколько напольных объектов в зависимости от их типа, используя для этого микропроцессор со специальной программой.
Техническая реализация установленных требований
МПЦ представляет собой сложную техническую систему, включающую в себя средства вычислительной техники, автоматики и связи, поэтому она должна обеспечиваться расширенным набором сервисных средств диагностики и тестирования системы.
Встроенные средства диагностики и тестирования, представляющие собой одну из внутренних подсистем МПЦ, должны производить диагностику ряда параметров:
-состояние нитей светофорных ламп;
-в случае использования двухнитевых ламп обнаруживать перегорание основной нити лампы и производить переключение на резервную;
-при работе стрелочного привода должен контролироваться потребляемый им ток, что позволит диагностировать состояние стрелочного привода и производить прогнозирование его технического состояния.
Использование в системе МПЦ высоконадежных протоколов передачи информации и специального связевого оборудования между объектными контроллерами и ЦП зависимостей должно обеспечивать контроль состояния кабельных магистралей.
Средства тестирования и самодиагностики системы МПЦ должны обеспечивать контроль технического состояния объектных контроллеров и ЦП. Для объектных контроллеров должна производиться диагностика в процессе работы до уровня «годен/не годен» с выдачей соответствующей информации персоналу, обслуживающему систему, что даст возможность быстро устранить возникающие неисправности и повысить готовность системы.
ЦП системы МПЦ должен быть выполнен в дублированном варианте, один комплект рабочий, а второй должен находиться в горячем резерве и иметь широкий набор тестов для определения работоспособности отдельных подсистем ЦП. Такой набор технических средств должен обеспечивать возможность глубокого тестирования состояния системы и своевременного обнаружения сбоев в ее работе, а в случае фатальных ошибок – переключение на резервный комплект аппаратуры.
Выводы
Таким образом мы ознакомились с микропроцессорной системой Ebilock-950, изучили его конструктивные особенности и основные требования к систмеме. МПЦ Ebilock- 950 может быть реализована в двух вариантах: с централизованным расположением оборудования и децентрализованным расположением оборудования. При централизованном варианте размещения процессорный модуль централизации (ПМЦ) Interlocking Processing Unit (IPU), реализующий логические взаимозависимости между станционными объектами, и аппаратура управления напольными устройствами (система объектных контроллеров- СОК) располагается на посту централизации. При децентрализованном варианте ПМЦ размещается на посту централизации, а СОК распределяется по станции в непосредственной близости от объектов управления.
Один комплект ПМЦ может управлять 150 логическими объектами, 1000 IPU объектами (стрелками, светофорами, обмотками реле, контактами реле), что приблизительно соответствует станции 40-60 стрелок.
В системе МПЦ Ebilock- 950 предусмотрено 100%-ное резервирование постовых устройств, применение собственных источников электропитания, рассчитанных на автономную работу в течение не менее 0.5 час., специальное построение линий связи и каналообразующей аппаратуры, что позволяет сохранять работоспособное состояние системы при возникновении отказов.