

22 Удаление ограничений
Чтобы удалить ограничение наведите курсор мыши на линию ограничения на графике. Курсор превратиться в большой крест. Нажмите правую кнопку мыши. В появившемся меню выберите Delete. Также ограничение можно удалить, выделив его левой кнопкой мыши и нажав затем клавишу Backspace или Delete клавиатуры.
Кроме того, если добавление ограничения было последним выполненным действием, то его можно удалить, выбрав в меню Edit пункт Undo Add Constraint или нажав Ctrl+Z.
23 Текущий компенсатор
Панель Current Compensator (текущий компенсатор) показывает структуру проектируемого компенсатора. По умолчанию компенсатор задан с единичным коэффициентом усиления без нулей и полюсов. После добавления полюсов и/или нулей панель Current Compensator отображает структуру компенсатора в формате нули/полюса/коэффициент усиления.
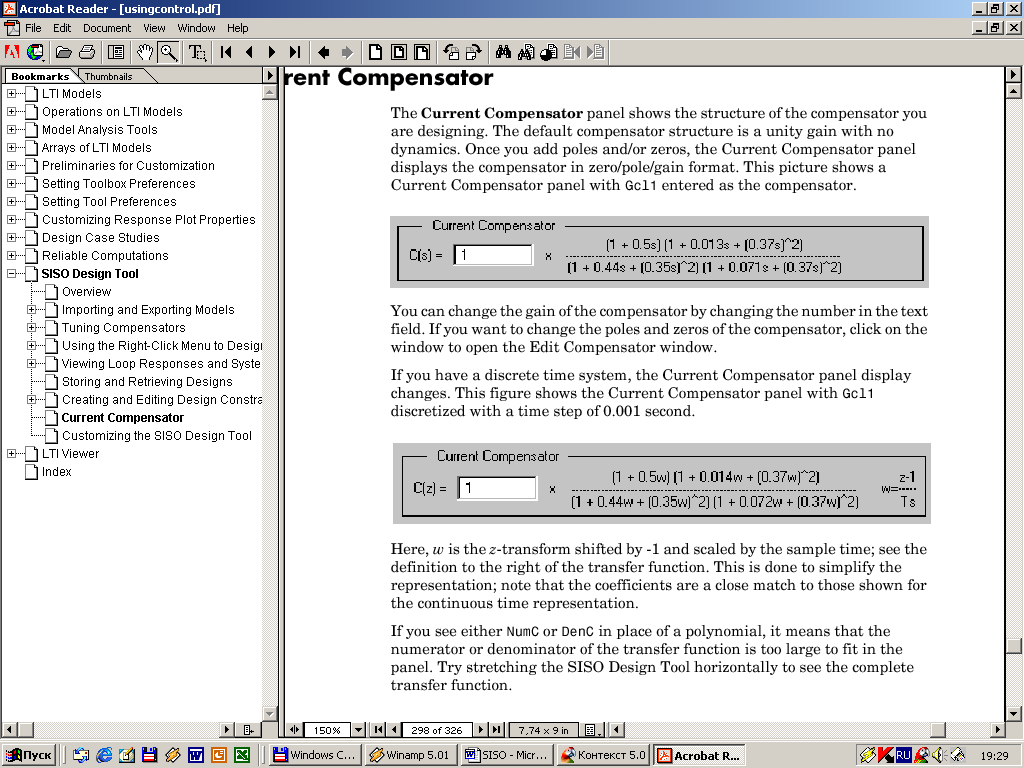
Рисунок 27 Панель текущего компенсатора
Коэффициент усиления компенсатора можно изменить в текстовом окне. Чтобы изменить нули и полюса, щелкните по окну мышкой. Откроется окно Edit Compensator.
При вводе систем с дискретным временем вид панели Current Compensator меняется.
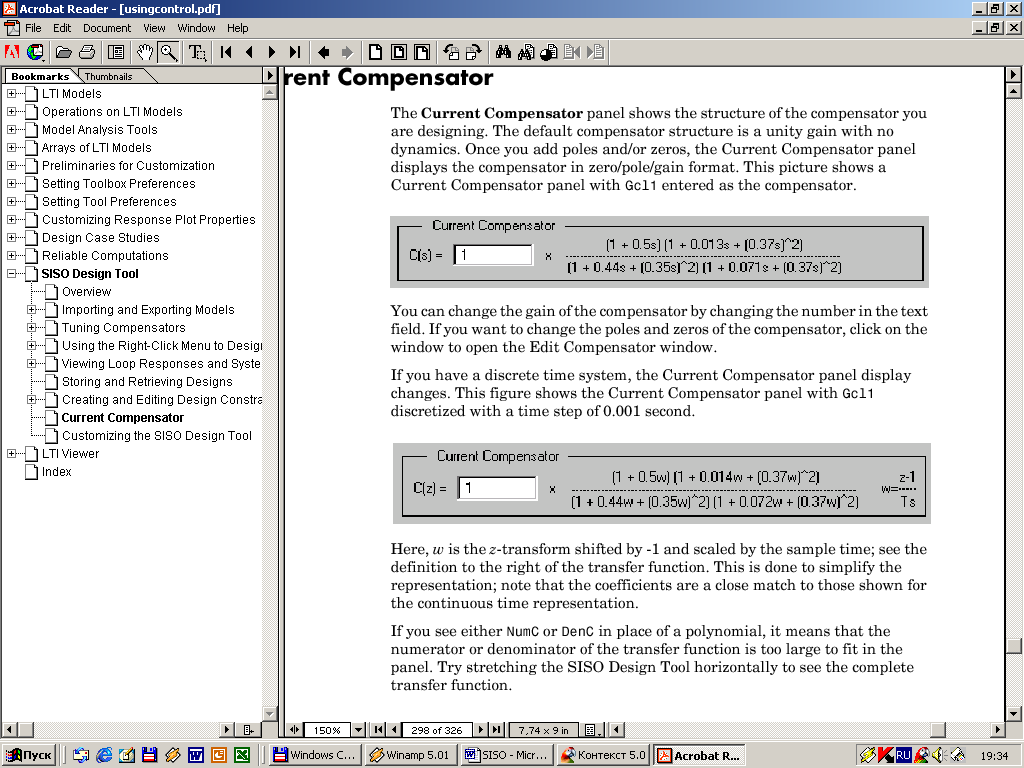
Рисунок 28 Панель текущего компенсатора при работе с дискретным временем (период дискретизации 0.001 с.)
Здесь w = (z-1)/Ts. Это сделано для упрощения представления. Обратите внимание, что коэффициенты почти совпадают с коэффициентами при непрерывном времени.
Если на месте полинома в окне компенсатора появятся обозначения NunC и DenC, это значит, что числитель и знаменатель передаточной функции слишком большие для отображения.
24 Переход от непрерывного времени к дискретному и обратно
Чтобы преобразовать систему из непрерывной в дискретную, выберите в меню Tools пункт Continuous/Discrete Conversions. Откроется окно Continuous/Discrete Conversions.
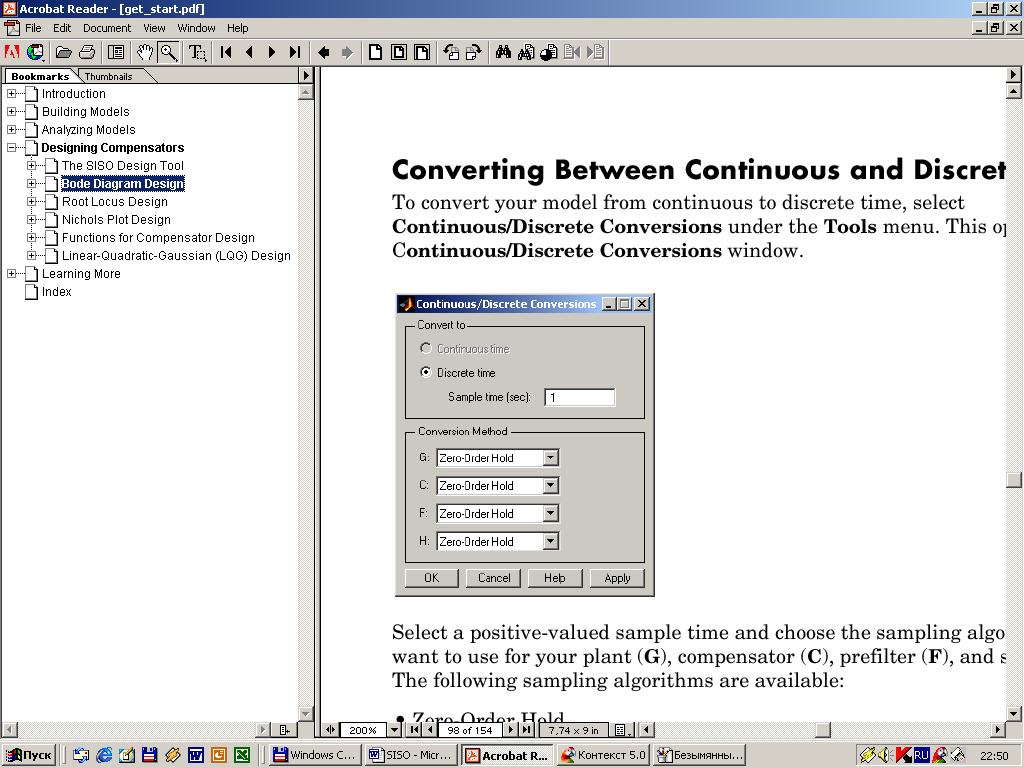
Рисунок 29 Окно Continuous/Discrete Conversions
Выберите период квантования в поле Sample time и метод восстановления для объекта управления (G), компенсатора (С), предфильтра (F) и датчика (Н). Доступными являются следующие алгоритмы восстановления:
Zero-Order Hold (приближение нулевого порядка).
First-Order Hold (приближение первого порядка).
Tustin (аппроксимация тастина).
Tustin w/Prewarping (аппроксимация тастина с предварительным квантование).
Match Zero/Pole (сопоставление нулей/полюсов).
Если в качестве метода восстановления выбран аппроксимация тастина с предварительным квантование, то появляется дополнительное окно, в котором необходимо задать частоту предварительного квантования.
Чтобы преобразовать систему обратно в непрерывную, выберите в меню Tools пункт Continuous/Discrete Conversions. Откроется окно Continuous/Discrete Conversions, в котором надо поставить галочку в строке Continues time.
Практическое задание
Запустите SISO Design Tool. Для этого нажмите кнопку Start на основном окне программы MATLAB и в появившемся меню выберите Toolboxes>Control System>SISO Design Tool.
По данным табл. 1 в соответствии с номером варианта в рабочем поле MATLAB с помощью функции tf задайте передаточную функцию объекта управления. Формат команды h = tf([числитель], [знаменатель]). Сохраните файл с именем ОУ.
Импортируйте созданный файл в SISO Design Tool в качестве объекта управления. Для этого выберите в меню File пункт Import. В появившемся окне поставьте галочку в строке MAT-file, затем нажмите кнопку Browse и выберите файл ОУ. В окне рядом появится имя переменной, которое вы задали для передаточной функции. Нажмите стрелку рядом со строкой G. В строке появится имя переменной. Нажмите OK.
С помощью метода расположения корней спроектируйте компенсатор, обеспечивающий удовлетворительное качество переходного процесса. Для этого в меню View поставьте галочку только в сроке Root-locus и Open-Loop Bode. Далее следуйте указаниям, изложенным в пункте ‘расположение корней’ на странице 7.
На титульном листе отчета укажите свою фамилию, группу и номер варианта.
Таблица 1.
№ варианта |
Параметры объекта регулирования |
|||
Kоб |
T1об, с |
Т2об, с |
об, с |
|
1 |
0,9 |
2,4 |
0,8 |
0,1 |
2 |
1,1 |
23 |
7 |
2 |
3 |
52 |
55 |
17 |
8 |
4 |
35 |
21 |
7 |
3 |
5 |
6 |
62 |
18 |
9 |
6 |
2,7 |
23 |
10 |
5 |
7 |
0,75 |
14 |
5 |
1,2 |
8 |
0,8 |
3,5 |
1,1 |
0,1 |
9 |
2,4 |
17 |
6,3 |
0,5 |
10 |
0,12 |
19,5 |
4,7 |
2,2 |
11 |
1,6 |
31 |
9,6 |
1 |
12 |
0,32 |
17 |
4,3 |
1,5 |
13 |
1,8 |
37 |
10 |
1,6 |
14 |
54 |
64 |
22 |
2,5 |
15 |
61 |
21 |
7,4 |
4,2 |
16 |
2,3 |
8 |
2,7 |
0,5 |
17 |
0,6 |
3,1 |
1,2 |
0,2 |
18 |
1,2 |
22 |
6,8 |
1,2 |
19 |
51 |
58 |
15 |
4,4 |
20 |
33 |
23 |
8 |
1,5 |
21 |
6,5 |
64 |
17 |
6 |
22 |
3,0 |
25 |
11 |
2 |
23 |
0,7 |
15 |
6,1 |
1,3 |
24 |
0,9 |
3,7 |
1,3 |
0,2 |
25 |
2,2 |
17,6 |
7,3 |
1,8 |
26 |
6,1 |
6 |
1,4 |
0,2 |
27 |
2,5 |
8,4 |
2,6 |
0,5 |
28 |
0,6 |
5,1 |
1,2 |
0,16 |
29 |
1,4 |
25 |
6,8 |
0,8 |
30 |
54 |
55 |
13 |
2,4 |