20 Теория автоматического управления
Исходные данные для курсовой работы:
1.Система автоматического управления.

2.Уравнение объекта:
![]()
3.
Tоб, с |
τоб,с |
коб |
20 |
20 |
2 |
Исследование объекта управления.
Вывод дифференциального уравнения объекта.
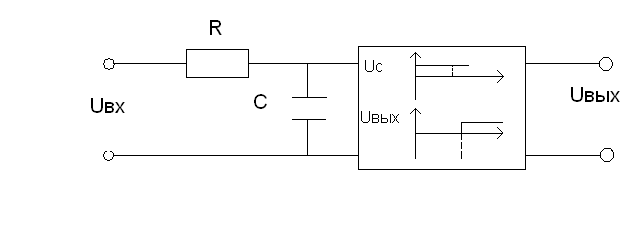
Рис.1. Схема исследуемого объекта.
Uвх =Ir +Uc; i=cdUс /dt
Uвх=RcdUс /dt+Uс;
Td Uс /dt+ Uс =KUвх Uвх , где T=RC, K=1.
С учетом запаздывания τ уравнение объекта:
TdUвых /dt+Uвых =KUвх(t-τ).
Значение T=RC, τ, K задаются преподавателем.
Вывод передаточной функции объекта:
![]()
![]() ;
;
![]()
![]()
![]()
![]()
Характеристики объекта:
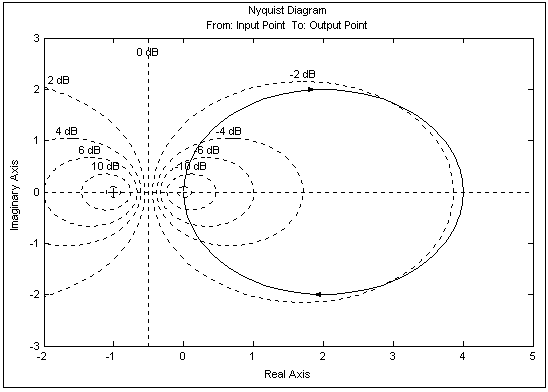
Амплитудно-фазовая характеристика:

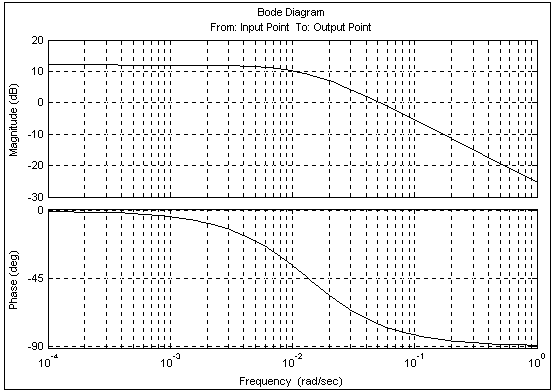
Логарифмическая характеристика:
![]()
Амплитудно-частотная характеристика:
A(ω)=
Фазо-частотная характеристика:
φ(ω)=![]()
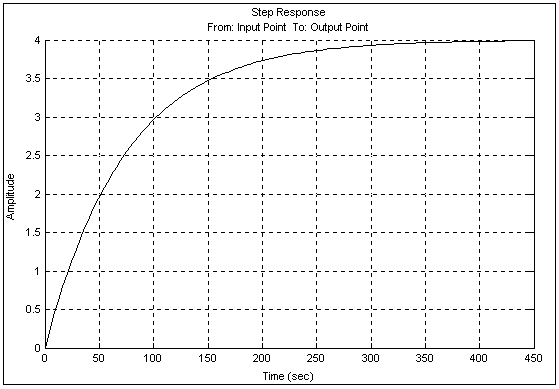
Переходная характеристика:
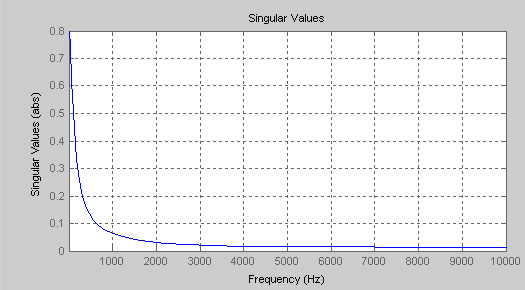
Амплитудная характеристика:
|
Амплитудно-фазовая характеристика:
Логарифмическая фазовая (ЛФХ) и амплитудная (ЛАХ) характеристики:
Исследование сау с п-регулятором
1. Исследование сау с п-регулятором без запаздывания
Схема САУ с П-регулятором и объектом без запаздывания:
Результаты моделирования при различном kp:
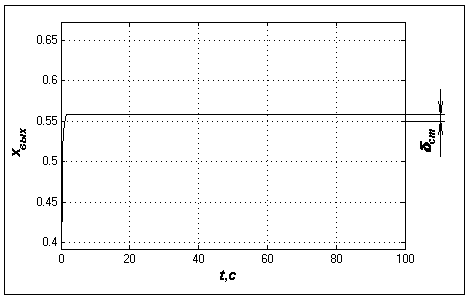
kp=100
Динамическое отклонение…нет.
Время регулирования …3[c].
Перерегулирование………….нет.
Устойчивость………………да.
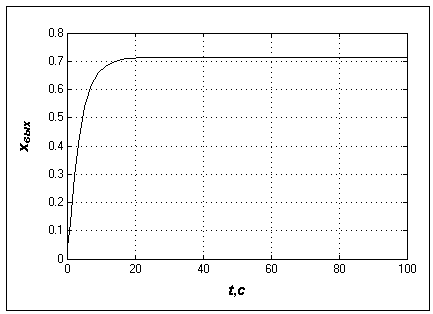
kр=5
Динамическое отклонение…нет.
Время регулирования …20[c].
Перерегулирование………….нет.
Устойчивость………………да.
kp=1000
Динамическое отклонение…..?
Время регулирования …+∞[c].
Перерегулирование………100%
Устойчивость………граничная.
Из графиков видно, что оптимальное значение kp=100,так как нет колебательности и статическая ошибка достаточно мала. При меньших значениях kp статическая ошибка увеличивается. При увеличении kp появляется колебательность.
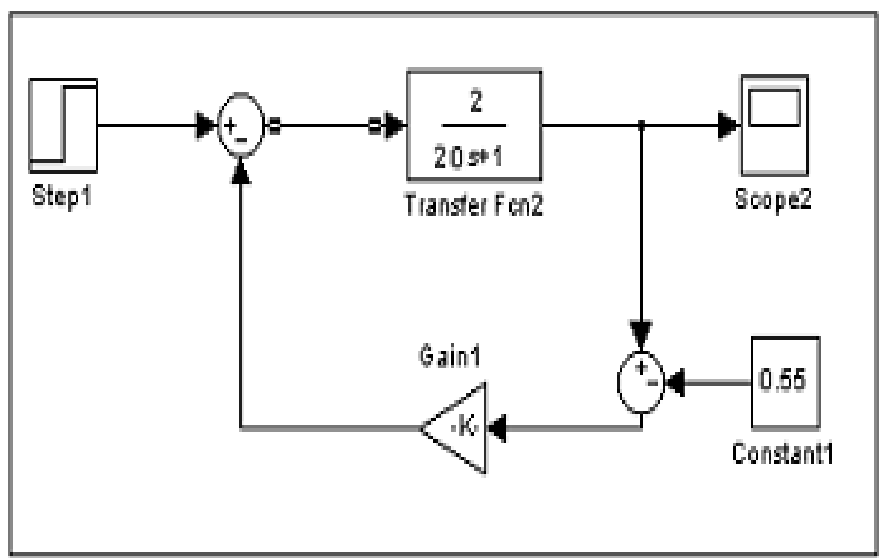
2. Исследование сау с п-регулятором с запаздыванием
Схема САУ с П-регулятором и объектом регулирования, которому соответствует запаздывание τоб =20[c]:

Результаты моделирования при различном kp:
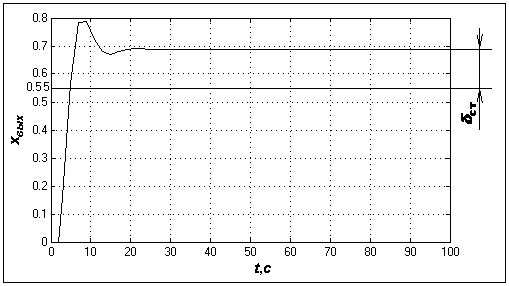
kp=6
Динамическое отклонение…0,1
Время регулирования …24[c].
Перерегулирование…………30%
Устойчивость………………да.
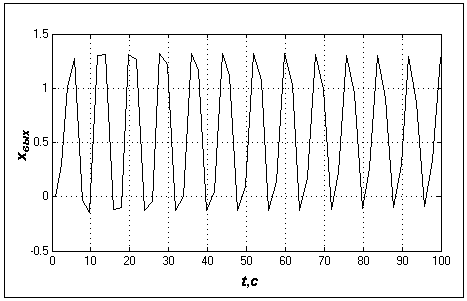
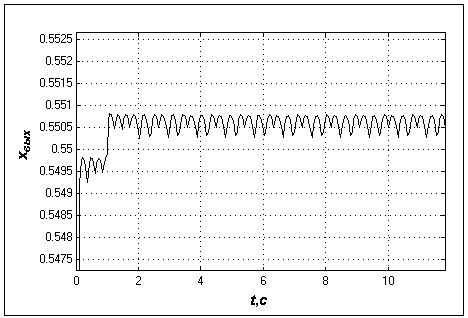
kp=18,5
Динамическое отклонение…?
Время регулирования …+∞[c].
Перерегулирование………100%
Устойчивость………граничная.
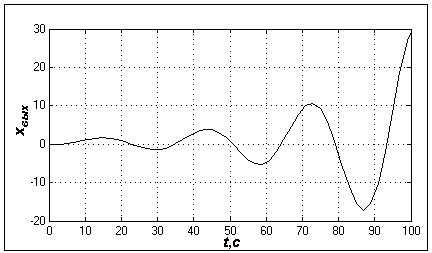
kp=20
Динамическое отклонение…----.
Время регулирования …-----
Перерегулирование……>100%
Устойчивость……………нет.
В данном случае приемлемое значение kp=6 ,так как не большая статическая ошибка и приемлемая длительность переходных процессов. При значении kp=18,5 получаем автоколебательный процесс, то есть система находится в граничном режиме работы. При kp>18,5 система выходит из устойчивого режима работы.
Характеристики замкнутой САУ:
![]()
![]()

![]()
![]()
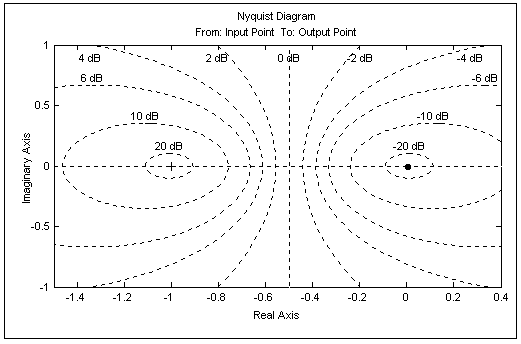
Амплитудно-фазовая характеристика:
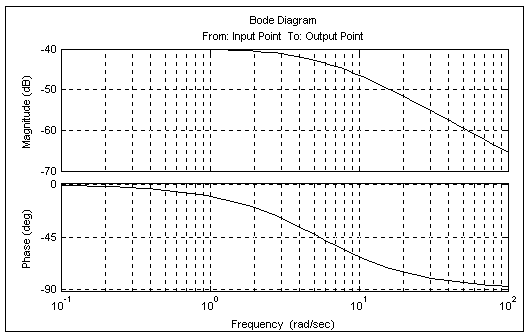
Логарифмическая фазовая (ЛФХ) и амплитудная (ЛАХ) характеристики:
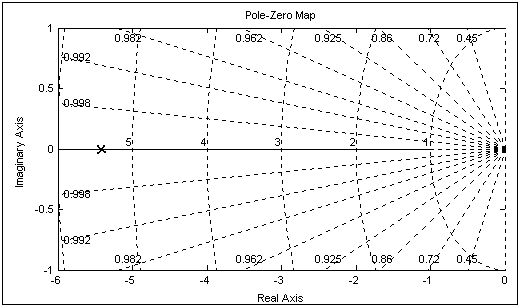
Корни характеристического уравнения: