

12.3. Плоскость. Основные задачи
Угол между двумя плоскостями. Условия параллельности и перпендикулярности двух плоскостей
Пусть заданы две плоскости Q1 и Q2:
A1x + B1y + C1z + D1 = 0,
А2х + В2у + C2z + D2 = 0.
Под углом между плоскостями Q1 и Q2 понимается один из двугранных углов, образованных этими плоскостями.
Угол φ
между
нормальными векторами
![]() = (A1;B1;C)
и
= (A1;B1;C)
и
![]() = (А2;В2;
С2)
плоскостей
Q1
и Q2
равен одному
из этих углов (см. рис. 72). Поэтому
= (А2;В2;
С2)
плоскостей
Q1
и Q2
равен одному
из этих углов (см. рис. 72). Поэтому
![]() или
или
![]()
Для нахождения острого угла следует взять модуль правой части.


Рис. 72. Рис. 73.
Если плоскости Q1
и Q2
перпендикулярны
(см. рис. 73, а),
то таковы же их нормали, т. е.
![]() (и наоборот).
Но тогда
·
= 0, т. е. А1А2
+ В1В2
+ С1С2
= 0. Полученное
равенство есть условие
перпендикулярности двух плоскостей
Q1
и Q2.
(и наоборот).
Но тогда
·
= 0, т. е. А1А2
+ В1В2
+ С1С2
= 0. Полученное
равенство есть условие
перпендикулярности двух плоскостей
Q1
и Q2.
Если плоскости Q1
и Q2
параллельны
(см. рис. 73, б),
то будут
параллельны и их нормали
и
(и наоборот). Но тогда, как известно,
координаты векторов пропорциональны:
![]() Это и есть
условие
параллельности
двух плоскостей Q1
и Q2.
Это и есть
условие
параллельности
двух плоскостей Q1
и Q2.
Расстояние от точки до плоскости
Пусть задана точка М0(х0;у0; z0) и плоскость Q своим уравнением Ах + By + Cz + D = 0. Расстояние d от точки М0 до плоскости Q находится по формуле
![]()
Вывод этой формулы такой же, как вывод формулы расстояния от точки М0(х0;у0) до прямой Ах + By + С = 0 (см. с. 61).
Расстояние d
от точки М0
до плоскости Q
равно модулю
проекции вектора
![]() ,
где
M1(x1;y1;z1)
— произвольная
точка плоскости Q,.на
направление нормального вектора
,
где
M1(x1;y1;z1)
— произвольная
точка плоскости Q,.на
направление нормального вектора
![]() = (А; В; С) (см.
рис. 74).
Следовательно,
= (А; В; С) (см.
рис. 74).
Следовательно,

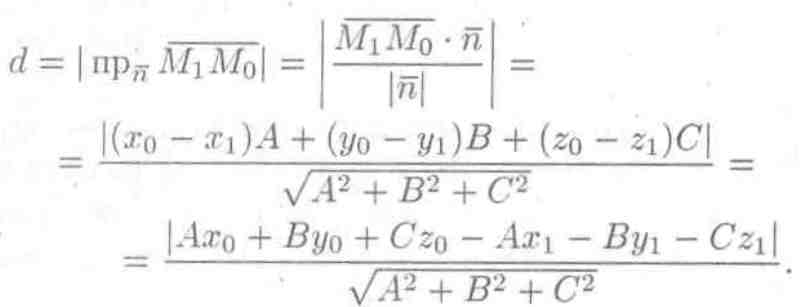


Рис. 74!
А так как точка M1(x1;y1;z1) принадлежит плоскости Q, то Ax1+By1+Czl+D = 0, т.е. D = -Ax1 – Ву1 – Сz1.Поэтому . Отметим, что если плоскость Q задана уравнением xcos α + у cos β + z cos γ -р = 0, то расстояние от точки М0(х0;у0; z0) до плоскости Q может быть найдено по формуле
d = |x0 cos α + ;y0 cosβ + z0 cosγ - р|.
Уравнения прямой в пространстве
Векторное уравнение прямой
Положение прямой
в пространстве вполне определено, если
задать какую-либо точку М0
на прямой и
вектор
![]() ,
параллельный этой прямой. Вектор
называется
направляющим
вектором прямой.
Пусть прямая
L
задана, ее
точкой М0(хо;
у0;
z0)
и
направляющим вектором
= (т;п;р).
Возьмем на
прямой L
произвольную
точку M(x;y;z).
Обозначим
радиус-векторы точек M0
и М соответственно
через
,
параллельный этой прямой. Вектор
называется
направляющим
вектором прямой.
Пусть прямая
L
задана, ее
точкой М0(хо;
у0;
z0)
и
направляющим вектором
= (т;п;р).
Возьмем на
прямой L
произвольную
точку M(x;y;z).
Обозначим
радиус-векторы точек M0
и М соответственно
через
![]() и
.
Очевидно,
что три вектора
,
и
и
.
Очевидно,
что три вектора
,
и
![]() связаны
соотношением
связаны
соотношением
= + (12.10)
Вектор , лежащий на прямой L, параллелен направляющему вектору , поэтому = t , где t — скалярный множитель, называемый параметром, может принимать различные значения в зависимости от положения точки М на прямой (см. рис. 75).
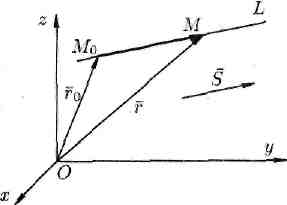

Рис. 75.
Уравнение (12.10) можно записать в виде
= + t (12.11)
Полученное уравнение называется векторным уравнением прямой.
Параметрические уравнения прямой
Замечая, что = (x;y;z), = (х0;у0;z0), t = (tm;tn;tp), уравнение (12.11) можно записать в виде
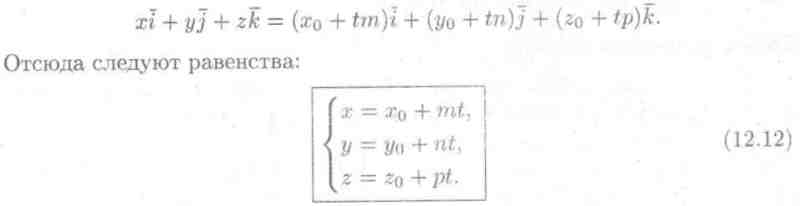

Они называются параметрическими уравнениями прямой в пространстве.
Канонические уравнения прямой
Пусть = (m;n;p) — направляющий вектор прямой L и M0(x0; y0;z0) - точка, лежащая на этой прямой. Вектор , соединяющий точку M0 с произвольной точкой М(х; у; z) прямой L, параллелен вектору . Поэтому координаты вектора = (х - х0; у – у0; z - z0) и вектора = (m;n;p) пропорциональны:
![]() (12.13)
(12.13)
Уравнения (12.13) называются каноническими уравнениями прямой в пространстве.
Замечания: 1) Уравнения (12.13) можно было бы получить сразу из параметрических уравнений прямой (12.12), исключив параметр t. Из уравнений (12.12) находим
= t