

Кутові швидкості ланок
|
1 |
… |
i |
… |
12 |
1 |
|
|
|
|
|
… |
|
|
|
|
|
j |
|
|
|
|
|
Визначення прискорень точок ланок механізму
Загальні відомості.
Як відомо, прискорення точок ланок механізму можуть бути визначені двома методами: методом планів прискорень - для всіх точок механізму в однім положенні механізму і за допомогою кінематичних діаграм - для однієї точки механізму при різноманітних положеннях механізму.
У даному проекті методом планів обмежуються при визначенні прискорення точок ланок механізму для трьох його положень. Плани прискорень використовують при динамічному аналізі плоского важільного механізму і будують їх на другому листі. Методом кінематичних діаграм визначають прискорення вихідної ланки для всіх розглянутих раніше положень механізму.
2.3.1 Побудова планів прискорень
а) Загальні відомості
Як відомо [2], прискорення двох точок M і N ланки, що бере участь у плоскому русі, пов'язані між собою векторним рівнянням:
![]() (2.10)
(2.10)
де
![]() - вектор відносного прискорення ланки
.
- вектор відносного прискорення ланки
.
У залежності від виду кінематичної пари, яку аналізована ланка утворить із з'єднуємою з нею у точці N іншою ланкою, вектор відносного прискорення визначається залежностями:
для обертальної КП (мал.2.4а)
![]() (2.11)
(2.11)
для поступальної КП (мал.2.4 б)
![]() (2.12)
(2.12)
де
![]() і
і
![]() - нормальна і тангенціальна складові
вектора відносного прискорення,
- нормальна і тангенціальна складові
вектора відносного прискорення,
![]() і
і
![]() - релятивна і кориолісова складові
вектора відносного прискорення.
- релятивна і кориолісова складові
вектора відносного прискорення.
Нормальну складову відносного прискорення, направлену по ланки від точки N до точки M , якщо центром обертання прийнята точка M, обчисляють по формулі
![]() (2.13)
(2.13)
Тангенціальну
складову відносного прискорення,
направлену перпендикулярно ланки NM й
указуючу напрямок кутового прискорення
![]() ланки, обчисляють по формулі
ланки, обчисляють по формулі
![]() (2.14)
(2.14)
Плани прискорень ланок механізму
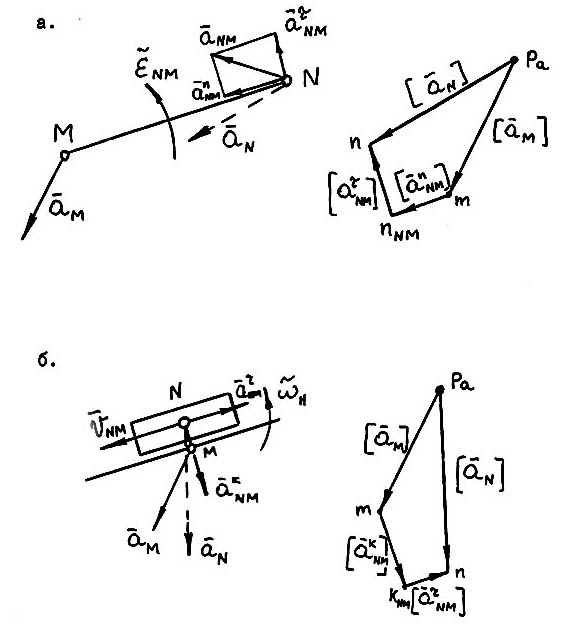
а - при плоскопаралельному русі ланки MN; Мал. 2.4
в - при поступальному русі ланки N.
Релятивну складову відносного прискорення, направлену по руху ланки по направляючий, визначають із плану прискорень, а кориолісове прискорення ланки знаходять по формулі
![]() , (2.15)
, (2.15)
де
![]() - кутова швидкість ланки, по якій рухається
повзун.
- кутова швидкість ланки, по якій рухається
повзун.
Для
визначення напрямку кориолісова
прискорення необхідно вектор відносної
швидкості
![]() (мал.2.1
б) на плані швидкостей для відповідного
положення механізму повернути на кут
900
по напрямку обертання ланки-направляючої
(по напрямку кутової швидкості
).
(мал.2.1
б) на плані швидкостей для відповідного
положення механізму повернути на кут
900
по напрямку обертання ланки-направляючої
(по напрямку кутової швидкості
).
б) Порядок побудови плану прискорень (мал. 2.5, 2.6)
Побудову плану прискорень для одного з положень починають із нанесення на лист полюса прискорень Ра (довільна, нерухома точка з прискоренням рівним нулю) із вказівкою індексу, що відповідає положенню механізму, і запису в ньому через коми позначень нерухомих точок, у тому числі стійок. Точки на планах прискорень позначаються також, як і на планах швидкостей прописними буквами латинського алфавіту. Після цього визначають розмір прискорення точки В вхідної ланки
![]() (2.16)
(2.16)
При
цьому варто врахувати, що
![]() = 0 (при
= 0 (при
![]() ).
).
Для
побудови вектора прискорення
![]() через полюс прискорень проводять лінію
паралельно положенню вхідної ланки на
плані положень механізму і на ній від
полюса в напрямку від точки до стійки
А відкладають відрізок [ab], відповідний
значенню прискорення
(мал. 2.5).
через полюс прискорень проводять лінію
паралельно положенню вхідної ланки на
плані положень механізму і на ній від
полюса в напрямку від точки до стійки
А відкладають відрізок [ab], відповідний
значенню прискорення
(мал. 2.5).
План прискорень вхідного валу
Мал. 2.5
План прискорень структурних груп
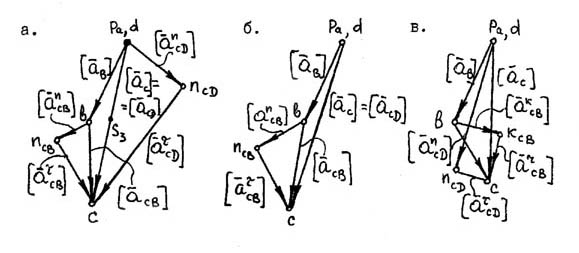
Мал. 2.6
а - СГ 1-го виду (ВВВ); б - СГ 11-го виду (ВВП);
в - СГ 111-го виду (ВПВ).
Задаються
масштабним коефіцієнтом прискорень
або вибирають його в масштабі кривошипа.
Для зручності користування масштабним
коефіцієнтом прискорення
![]() розмір відрізка [ab] рекомендується
вибирати кратному розміру прискорення
.
Чисельне значення масштабного коефіцієнта
прискорень варто узгодити з масштабами
і воно повинно забезпечувати « читаємість»
плану прискорень.
розмір відрізка [ab] рекомендується
вибирати кратному розміру прискорення
.
Чисельне значення масштабного коефіцієнта
прискорень варто узгодити з масштабами
і воно повинно забезпечувати « читаємість»
плану прискорень.
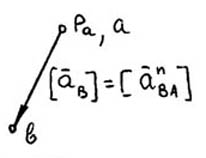
Далі визначають прискорення точки С, що належить двом ланкам (мал. 2.3), пов'язаним іншими своїми точками з вхідною ланкою (як правило в точці В) і іншою ланкою (наприклад, із стійкою) прискорення якийсь його точки D відомо.
Положення точки С на плані прискорень визначають графоаналітично відповідно до рівнянь:
- для обертальних кінематичних пар (мал. 2.3 а):
![]() }
}![]() (2.17)
(2.17)
коли кінематичні пари В и C - обертальні, а кінематична пара D - поступальна (ланка 3 - камінь) рухається по нерухомій направляючій (мал. 2.3 б):
![]() }
}
![]() (2.18)
(2.18)
для кулісного механізму, коли кінематичні пари В и D - обертальні, а кінематична пара С - поступальна (мал. 2.3 в)
![]() }
}![]() (2.19)
(2.19)
У цих
рівняннях однією лінією підкреслені
прискорення, для котрих відомо тільки
їхній напрямок (
![]() і
і
![]() направлені перпендикулярно ланкам СВ
і CD;
направлені перпендикулярно ланкам СВ
і CD;
![]() і
і
![]() - паралельно тим же ланкам), а двома
лініями - прискорення, для яких відомий
напрямок і розмір:
- паралельно тим же ланкам), а двома
лініями - прискорення, для яких відомий
напрямок і розмір:
![]() (2.20)
(2.20)
направлені
паралельно ланкам СВ і СD відповідно
від точки С к точкам В (![]() )
і D (
)
і D (![]() ) (мал. 2.6 а, в).
) (мал. 2.6 а, в).
Кориолісове прискорення обчислюють по формулі
![]() (2.21)
(2.21)
а
його напрямок визначають поворотом на
900
вектора відносної швидкості
![]() ланки СВ по напрямку кутової
швидкості
ланки СВ по напрямку кутової
швидкості
![]() ланки СD (мал. 2.6 в).
ланки СD (мал. 2.6 в).
Для
визначення положення точки С на плані
прискорень обчислюють розміри відрізків
![]() а
а![]() /а;
/а;
![]() =а
=а![]() /a;
[bkCB]=
/a;
[bkCB]=![]() і відкладають їх відповідно до вказівок
до формул (2.20) і (2.21) від кінців векторів
і відкладають їх відповідно до вказівок
до формул (2.20) і (2.21) від кінців векторів
![]() (мал.2.6) та
(мал.2.6) та
![]() .
.
Перетинання
напрямків тангенціальних складових (![]() і
і![]() )
прискорень для ланок (мал. 2.3 а),
тангенціальної (
)
прискорень для ланок (мал. 2.3 а),
тангенціальної (![]() )
і релятивної (
)
і релятивної (![]() ) складових (для ланок мал.
2.3
б), релятивної (
) складових (для ланок мал.
2.3
б), релятивної (![]() )
і тангенціальної (
)
складових прискорень (для ланок мал.
2.3 в), проведених відповідно через кінці
векторів, що зображують на плані
прискорень складові прискорення точки
С:
)
і тангенціальної (
)
складових прискорень (для ланок мал.
2.3 в), проведених відповідно через кінці
векторів, що зображують на плані
прискорень складові прискорення точки
С:
![]() і
і
![]() (для ланок мал. 2.3 а),
і
(для ланок мал. 2.3 а),
і
![]() (для ланок мал. 2.3 б),
(для ланок мал. 2.3 б),
![]() і
(для ланок мал. 2.3 в), визначить точку С
на плані прискорень і розмір абсолютного
прискорення
і
(для ланок мал. 2.3 в), визначить точку С
на плані прискорень і розмір абсолютного
прискорення
![]() точки С (шляхом побудови вектора, що
з'єднує полюс Ра
з точкою С на плані прискорень)
точки С (шляхом побудови вектора, що
з'єднує полюс Ра
з точкою С на плані прискорень)
![]() м/с2 (2.22)
м/с2 (2.22)
де [Pac]
- відрізок, що зображує прискорення
![]() на плані прискорень, мм.
на плані прискорень, мм.
Одночасно, по довжинах відрізків [bc]; [cd]; [nCBc]; [nCDc]; [kCBc] визначають розміри відносних прискорень aCB; aCD:
![]() (2.23)
(2.23)
![]() (2.23)
(2.23)
та їх складових:
![]()
![]() (2.24)
(2.24)
![]()
![]()
Напрямок
абсолютного прискорення аС
і його складових (![]() ;
;![]() ;
;
;
;![]() ;
;
![]() )
визначають по кінцях їхніх векторів,
що сходяться в точці С (мал. 2.6).
)
визначають по кінцях їхніх векторів,
що сходяться в точці С (мал. 2.6).
Знаходження прискорень інших точок, що належать раніше розглянутим ланкам, роблять по теоремі подоби, відповідно до якої відношення двох будь-яких відрізків ланки дорівнює відношенню відповідних відрізків на плані прискорень цієї ланки, подібного самій ланки.
Для ланок, що рухаються плоскопаралельно або обертально, обчислюють розмір кутового прискорення за допомогою формул
![]() 1/м2;
1/м2;
(2.25)
![]() 1/м2.
1/м2.
Напрямок
кутового прискорення визначають по
напрямку вектора
або
![]() ,
умовно перенесеного з плану прискорень
на план положення відповідної ланки
(СВ або СД) у точку С (при умовно нерухомій
точці В (Д)).
,
умовно перенесеного з плану прискорень
на план положення відповідної ланки
(СВ або СД) у точку С (при умовно нерухомій
точці В (Д)).
Побудова плану прискорень, визначення розмірів і напрямків прискорень точок ланок і структурних груп, послідовно під’єднаних до ланок найпростішого механізму, для точок котрого прискорення вже знайдені, виконують в описаній раніше послідовності. Кутові прискорення ланок механізму, що беруть участь у плоскопаралельному русі, визначають по залежностях (2.25).
Результати розрахунку прискорень усіх точок ланок, у тому числі відносних і кутових для трьох положень зводять у таблиці, у яких i - номер положення механізму, j - номер ланки, А, В... - кінематичні пари.
Таблиця 2.4