

Побудування евольвенти
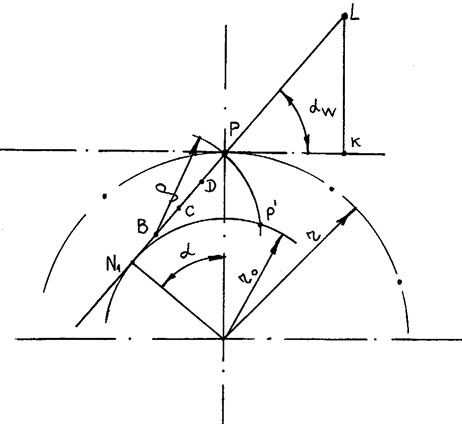
Мал. 5.2
5.4. Визначення якісних показників зачеплення
До якісних показників зачеплення ставляться коефіцієнти перекриття , відносного ковзання і питомого опору .
У курсовому проекті студент визначає розмір коефіцієнта перекриття і будує графіки коефіцієнтів відносного ковзання.
Коефіцієнтом перекриття називають відношення довжини дуги зачеплення до кроку по початкових окружностях коліс. Він характеризує повільність зачеплення, а його розмір показує середню кількість пар зубів, що знаходяться одночасно в зачепленні. Тому для нормальної, ненаголошеної роботи зубцюватого зачеплення необхідно, щоб коефіцієнт перекриття був більше единицыю. Його розмір визначають по формулі
![]() (5.16)
(5.16)
де
![]() і
і
![]() -
роги профілю зуба відповідно шестерні
і колеса у вершин, обумовлені залежностями:
-
роги профілю зуба відповідно шестерні
і колеса у вершин, обумовлені залежностями:
 (5.17)
(5.17)
Коефіцієнтом
відносного /питомого/ ковзання
![]() називають відношення швидкості ковзання
vк
точок контакту зубів до ксательным
складових
називають відношення швидкості ковзання
vк
точок контакту зубів до ксательным
складових
![]() швидкостей
точок контакту сполучених профілів
швидкостей
точок контакту сполучених профілів
 (5.18)
(5.18)
-для зуба шестерні
 (5.19)
(5.19)
- для зуба колеса.
Тут
![]()
Для практичних розрахунків використовують залежності:
 (5.20)
(5.20)
де
![]() і
і
![]() - передатне число зубцюватого зачеплення;
l- довжина
відрізка N1
N2
лінії зачеплення /мал.
5.1/; х-
відстань торкання N1
теоретичної лінії
зачеплення з основною окружністю першого
/меншого/ колеса до поточної точки
контакту зубів, що звітується в напрямку
до точки N2
.
- передатне число зубцюватого зачеплення;
l- довжина
відрізка N1
N2
лінії зачеплення /мал.
5.1/; х-
відстань торкання N1
теоретичної лінії
зачеплення з основною окружністю першого
/меншого/ колеса до поточної точки
контакту зубів, що звітується в напрямку
до точки N2
.
Користуючи формулами /5.20/, скласти табл. Значень 1і 2.
Таблиця
Коефіцієнти відносного ковзання
|
|
|
|
|
|
1і |
|
|
|
|
|
2 |
|
|
|
|
|
Довжину теоретичної лінії зачеплення вимірюють на мал.5.1, розмір х змінюють у межах від о до l з інтервалами 15 - 30 мм. Користуючи даними табл., будують діаграми для значень коефіцієнтів 1і 2 в прямокутній системі координат (мал.5.4): вісь абсцис проводять паралельно прямой N1 N2 через або точку О1, або О2, віссю ординат буде або О1N1, або О2N2.
На діаграмах 1і 2 виділяють ділянку, що відповідає активної частини ab лінії зачеплення.
6. Проектування кінематичної схеми планетарного редуктора
/синтез планетарної передачі/
/Розрахунки студент виконує в пояснительной записці, а графічну частину - на п'ятому листі/
Як відомо, для зниження числа оборотів двигуна на його валі встановлюють редуктор, вихідний вал якого надає руху вхідна ланка підоймового механізму. Редуктора механізмів, аналізованих у завданнях на курсовий проект, складаються з двох послідовно сполучених передач - планетарної передачі - одне - або двохступінчатої/ і відкритої одноступінчатої зубцюватої передачі з зовнішнім зачепленням. Гідності планетарної передачі /соосность, малі габарити при достатньо великих передатних відношеннях/ дозволяють установлювати її безпосередньо на валі двигуна.
Задачею синтезу планетарної передачі /планетарного редуктора / є визначення числа зубів коліс і числа сателітів.
Вихідними даними для цього розрахунку є частота обертання двигуна nдв, частота обертання вихідного вала редуктора n1 вид і число їхніх щаблів редуктора, числа зубів коліс Zк і Zш циліндричної передачі.