

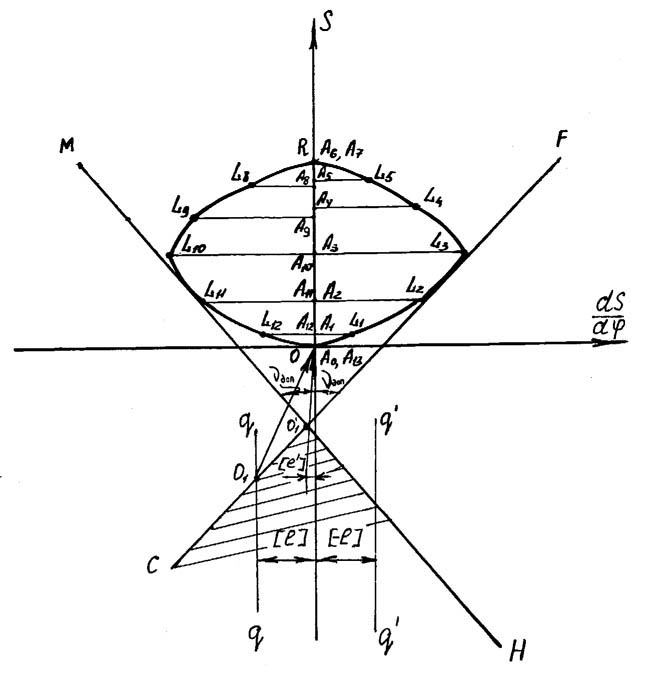
Динамічний аналіз кулачкового механізму з возвратно-поступальною що рухається штовхальником
Мал. 4.4
Слід зазначити, що чим нижче усередині заштрихованого рогу CO1H розташувати центр обертання кулачка O1
Слід зазначити, що чим нижче усередині заштрихованого рогу розташувати центр обертання кулачка , тим меншим буде максимальний ріг тиску max і тем краще будуть умови роботи механізму. Проте, одночасно з поліпшенням умов роботи механізму буде збільшуватися максимальний радіус r0 кулачка й отже будуть рости його розміри.
б) Кулачковий механізм із хитним коромислом (мал.4.1в)
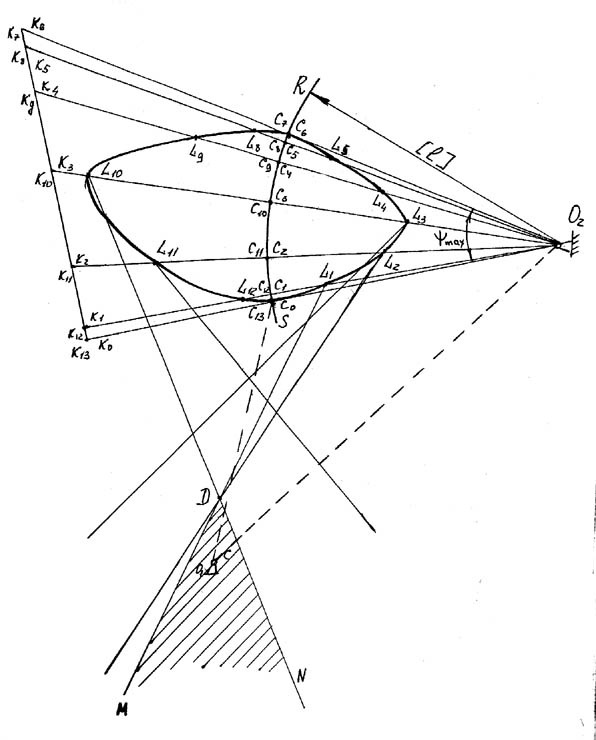
Як було сказано раніше, при динамічному синтезі такого кулачкового механізму крім визначення мінімального радіуса кулачка r0mіn визначають відстань O1O2 між центрами обертання кулачка O1 і лаштунки O2. Порядок рішення цих задач такий:
- з довільної точки (центру обертання лаштунків) O2 проводять дугу, радіусом SR (мал.4.5)
![]()
=
=
![]() (4.15
)
(4.15
)
де - довжина коромисла, м;
s - довільно обраний масштабний коефіцієнт переміщення; SR - на дузі відзначають точку C0 - початкове положення центру ролика штовхача (коромисла). Від точки C0 по дузі SR з масштабним коефіцієнтом s відкладають розмір ходу центру ролика C0C6 = max . Можна також від початкового положення відкласти ріг каченя max коромисла;
- шлях
центру ролика C0C6
розмічають відповідно до побудованого
раніше діаграмою переміщення ()
. Для цього на прямої O2C0
відкладають відрізок O2К0
= (1,5![]() 2,0)
O2C0
, до якого в точці К6
відновлюють перпендикуляр і відзначають
на ньому точку К0
перетинання його з продовження прямої
O2С6
. На перпендикулярі К0К6
відкладають відрізки К0К1,
К0К2,….К0Кі…
К0К13,
що відповідають тангенсам рогів каченя
коромисла й обумовлені по діаграмі
()
на мал.4.3в
2,0)
O2C0
, до якого в точці К6
відновлюють перпендикуляр і відзначають
на ньому точку К0
перетинання його з продовження прямої
O2С6
. На перпендикулярі К0К6
відкладають відрізки К0К1,
К0К2,….К0Кі…
К0К13,
що відповідають тангенсам рогів каченя
коромисла й обумовлені по діаграмі
()
на мал.4.3в
К0Кі = К0 O2tgі (4.16 )
де і = yі - ріг повороту коромисла для і -го положення кулачка. Промені O2К1, O2К2, …, O2Кі,…, O2К13 являють собою миттєві положення коромисла при його переміщенні по заданому законі прямування, а точки С1, С2,…, Сі,…, С13 перетинання цих променів з інший С0С6 визначають відповідні положення центру ролика;
- на променях O2 С1, O2 С2, …, O2С13 від точки С1, С2,… ,Сі, …, С13 відкладають відрізки С1Lі, розміри яких відшукують по формулі
С1Lі
=
![]()
,
(4.17 )
,
(4.17 )
де і - номер положення кулачка; - аналог кутової швидкості коромисла; - довжина коромисла; s - масштабний коефіцієнт довжини (переміщення). Відрізки CіLі відкладають на проміжних положеннях коромисла на фазі підйому (видалення) коромисла (від центру його обертання O2 , якщо кулачок і коромисло обертаються в протилежних напрямках і до центру O2 , якщо вони обертаються в одну сторону);
Динамічний аналіз кулачкового механізму з хитним коромислом
Мал. 4.5
-
через крайні точки L1,
L2,…,
Lі,…,
L13
проводять прямі під мінімально припустимим
рогом передачі прямування
![]() = 90o
-
= 90o
-
![]() до даних відрізків. Будують що обгинає
криву MDN, що визначає область центру
кулачка. З достатньою точністю можна
вважати що ця область розташовується
між прямими, що мають щонайнижчу точку
перетинання D (заштрихована область на
мал.4.5). Обране в цій області положення
центру O1
обертання кулачка визначає шуканий
початковий радіус ro
= O1C0
s
і відстань L12
між центрами обертання кулачка і
коромисла.
до даних відрізків. Будують що обгинає
криву MDN, що визначає область центру
кулачка. З достатньою точністю можна
вважати що ця область розташовується
між прямими, що мають щонайнижчу точку
перетинання D (заштрихована область на
мал.4.5). Обране в цій області положення
центру O1
обертання кулачка визначає шуканий
початковий радіус ro
= O1C0
s
і відстань L12
між центрами обертання кулачка і
коромисла.
L12 =O1O2 s (4.18)
Довжина мінімального радіуса кулачка визначається відрізком DCo . При цьому відстань L між центрами обертання кулачка і коромисла буде дорівн
L = LO2 s (4.19)
4.5. Кінематичний аналіз кулачкового механізму
Проектування профілю кулачка при заданих вихідних даних здійснюють методом обертання механізму. За допомогою цього методу розглядають прямування штовхача (коромисла) навколо умовно загальмованого кулачка.
а) Кулачковий механізм із штовхачем, що зворотно-поступально рухається, (мал.4.1 а)
Для проектування профілю кулачка необхідно знати закон прямування штовхача S() у виді діаграми (мал.4.6 а), мінімальний радіус кулачка r0, ексцентриситет штовхача е.
Порядок проектування (мал.4.6 б):
- через довільну точку A0 проводять вертикаль A0F - траєкторію штовхача, на котрої нижче точки A0 вибирають точку B0 - центр ролика штовхача;
-
зліва від прямої A0F
на відстані
=![]() , обумовленій ексцентриситетом e ,
проводять пряму OE//A0F.
На цієї прямої з центру B0
дугою радіуса B0O=r0=
, обумовленій ексцентриситетом e ,
проводять пряму OE//A0F.
На цієї прямої з центру B0
дугою радіуса B0O=r0=![]() роблять зарубку.
роблять зарубку.
Точка О є центром обертання кулачка:
- із центру О радіусами і OB0 проводять дві окружності. При переміщенні (обертанні) штовхача навколо кулачка вісь його прямування завжди спрямована по дотичної до окружності радіуса ;
- окружність радіуса від точки C0 торкання її з вертикаллю A0F поділяють (у межах робочого рогу профілю p , відліченого проти годинної стрілки) на частині через 10o ( 1 = 2 = … = 100);
- у точках C1, C2, C3, ... кінців цих ділянок проводять дотичні до окружності, що визначають положення осі штовхача для кожного рогу повороту зверненого механізму;
- від точок B1, B2, B3, ... перетинання цих дотичних з окружністю радіуса OB0 відкладають відрізки S1, S2, S3 , .... узяті з діаграми переміщень кулачка (мал.4.6 б). Одержують точки B1, B2, B3, ... центрового профілю, що з'єднують за допомогою лекала плавної кривої;
-
визначають радіус ролика rp![]() (0,4
0,5)r0
і будують профіль кулачка еквидистантно
кривої центрового профілю на відстані
(0,4
0,5)r0
і будують профіль кулачка еквидистантно
кривої центрового профілю на відстані
rp
=
![]()
б) Кулачковий механізм із хитним коромислом (мал.4.1 в)
Для проектування профілю кулачка необхідно знати закон прямування коромисла () у виді діаграми (мал.4.7 а), мінімальний радіус кулачка ro, довжину коромисла і міжосьове відстань L0102 .
Порядок проектування (мал.4.7 б):
- із
довільно розташованої точки O1
(вісь кулачка) проводять дві окружності:
А - радіусом ro=![]() і С - радіусом O1O2;
і С - радіусом O1O2;
- дугою SR радіуса = з центру обертання коромисла довільно прийнятого на окружності С, роблять зарубку на окружності А. Отримана точка Bo визначає саме близьке положення коромисла до центру кулачка. Розмічають дугу SR - траєкторію прямування центру ролика - відповідно до діаграми прямування (мал.4.7 а) на ділянці BoB5 (див.п.4.4);
- від прямої O1O2 в напрямку обертання кулачка послідовно відкладають задані фазові роги , , ;
- розбивають роги і променями на роги, що відповідають положенням кулачка (діаграма мал. 4.7 а), і на окружності С одержують точки B1, B2, ... ;
із точок B1, B2 , … проводять дуги радіусами = , засікають їх у точках B1, B2, ... дугами радіусів O1B1 , O1B2 , …... , проведеними з центру обертання кулачка O1;
- з'єднують за допомогою лекала і циркуля плавної кривої точки B1, B2, ... і одержують теоретичний профіль кулачка;
- визначають радіус ролика rp< (0,4 0,5)r0 ;
- із точок B1, B2, ….. проводять окружність радіусом rp = ;
будують що обгинає отриманих окружностей, що є практичним профілем кулачка.