

Графічне інтегрування функції
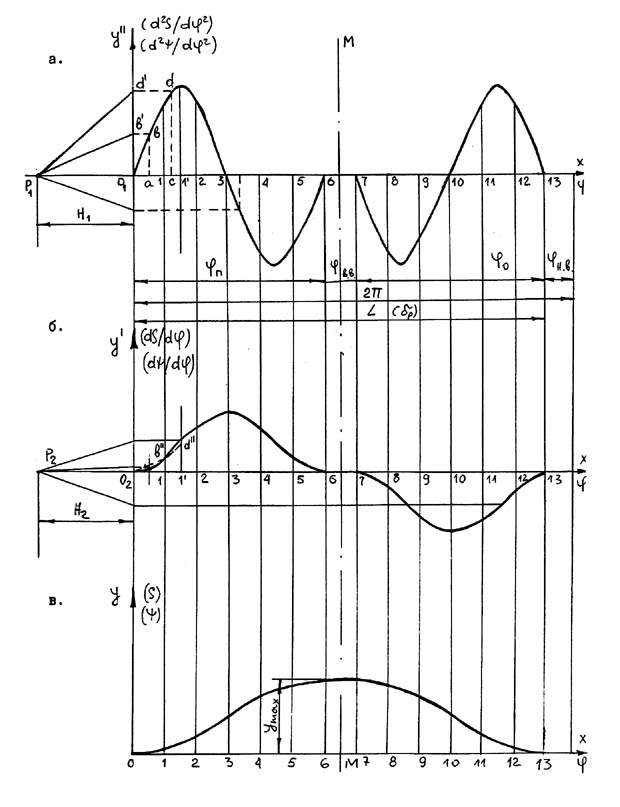
Мал. 4.3
а – первісна функція; б і в – послідовно інтегруємі функції.
Вибір масштабних коефіцієнтів при графічному інтегруванні роблять такою уявою. З огляду на, що при синтезі кулачкового механізму, вісь абсцис Х відповідає рогові повороту кулачка , а вісь ординат - первісної (мал.4.3 а) - прискоренню вихідного елемента (d2S/d2 ) або (d2 ) (без указівки масштабів, у яких побудована задана крива), необхідно визначитися з масштабними коефіцієнтами функції й аргументу на графіках (мал.4.3). По осі абсцис X, як правило, відкладають відрізок довжиною L, мм, що відповідає рогові робочого профілю p на кулачку. У цьому випадку масштабний коефіцієнт (( )) рогів повороту визначиться залежністю
x==![]() ,
,
![]() (4.2)
(4.2)
де довжину відрізка L вибирають, як правило, пропорційної кроку розбивки X осі абсцис.
Відомо 2 , що між масштабними коефіцієнтами діаграм при графічному інтегруванні існують такі залежності (мал. 4.3)
у=Н2х![]()
(4.3)
=Н1х![]()
де -у=s;
=![]() ;
;
![]() =
=![]() -
масштабні коефіцієнти переміщення,
аналогів швидкості і прискорення
штовхача для кулачкового механізму зі
штовхачем, що зворотно-поступально
рухаються; - масштабні коефіцієнти рогу
повороту, аналогів швидкості і прискорення
коромисла для кулачкового механізму з
хитним коромислом.
-
масштабні коефіцієнти переміщення,
аналогів швидкості і прискорення
штовхача для кулачкового механізму зі
штовхачем, що зворотно-поступально
рухаються; - масштабні коефіцієнти рогу
повороту, аналогів швидкості і прискорення
коромисла для кулачкового механізму з
хитним коромислом.
При побудові вихідної функції (х) і графічного інтегрування рекомендується приймати такі значення розмірів:
- відрізок L - від 240 мм до 360 мм;
- відрізок, що відповідає максимальному значенню , у межах 60-100 мм;
- відрізки Н1 і Н2, що визначають положення полюсів Р1 і Р2 у межах 40-60 мм.
Таким чином, задавшись розмірами відрізків L , ( )max, Н1 і Н2 і двічі про інтегрував вихідну функцію (мал. 4.3), обчисляють один по одному значення масштабних коефіцієнтів: для кулачкового механізму зі штовхачем, що зворотно-поступально рухається:
=
;
;
s=![]() ;
;
![]() .
.
(4.4)
=![]() ;
;
![]() ;
=
;
= ;
;
![]()
або для кулачкового механізму з хитним коромислом:
=
;
;
=![]() ;
.
;
.
![]() =
=![]() ;
;
![]() ;
;
![]() =
;
=
;
![]() . (
4.5)
. (
4.5)
Знаючи масштаби всіх кінематичних діаграм, визначають значення: пройденого шляху штовхача S=s-у або рогу повороту коромисла =у
швидкості штовхача = у; або коромисла
 =
у
прискорення штовхача
=
у;
=
у
прискорення штовхача
=
у;або коромисла =
 у;
у;
в будь-якому положенні механізму. Ці значення вписують потім у таблицю 4.1.
Таблиця 4.1
Значення переміщень і рогів повороту і їх похідних
№ положення |
|
1 |
2 |
… |
і |
… |
К |
S()
|
мм (град) |
|
|
|
|
|
|
dsd (d/d) |
м/гр (гр/гр) |
|
|
|
|
|
|
D2s/d2 (d2/d2) |
м/гр2 (гр/гр2) |
|
|
|
|
|
|
4.4 Динамічний аналіз кулачкового механізму
а) Кулачковий механізм із штовхачем, що зворотно-поступально рухається, (мал.4.1 а)
Для визначення теоретичного початкового радіуса кулачка будують фазовий портрет S- у декартовій системі координат (мал.4.4), для чого з початку координат «О» відкладають нагору відрізок OR , обумовлений ходом штовхача h і довільно прийнятим для цієї побудови масштабним коефіцієнтом s
OR=![]() (4.9)
(4.9)
який розмічають від О точками А1... А13 відповідно до графіка S- на мал. 4.3 в. Через точки А1, А2.Аі відрізка OR проводять перпендикуляри до нього (горизонталі), на яких відкладають відрізки A1L1, A2L2... AіLі , що відповідають значенням передатної функції (аналогу швидкості ( )і) для кожного значення рогу повороту кулачка , 1,2 ... і
AіLі= (4.10)
(4.10)
де масштабний коефіцієнт аналога швидкості приймають рівним прийнятому раніше масштабному коефіцієнтуs переміщення, тобто
=s (4.11)
Побудову виконують у правій системі координат. При видаленні штовхача передатну функцію (аналог швидкості ) вважають позитивної і відкладають управо, а при зближенні (опусканні) штовхача - негативної і відкладають уліво. З'єднуючи плавної кривої (за допомогою лекала) кінці Lі відрізків AіLі одержують замкнуту криву - шуканий фазовий портрет S- . Під рогом доп. до проведеної вертикалі проводять дві дотичні HM і CF до побудованої кривої. Точка O1 перетинання цих дотичних визначить положення осі обертання кулачка, що має найменший радіус – вектор romіп.= O1Оs і необхідний у цьому випадку мінімальний ексцентриситет e=es. У тому випадку, коли ексцентриситет заданий, проводять вертикаль q-q, усунуту щодо осі ординат S на розмір відрізка e, що відповідає заданому ексцентриситету e
e=![]() (4.13)
(4.13)
і точка O1 перетинання цієї лінії з дотичної HM визначить найменший для заданих умов теоретичний радіус ro кулачка
ro=O1Os (4.14)