

Значення робіт
№полож. |
1 |
2 |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. У тих самих координатах (під графіком Mп(), при збігу напрямків осі ординат) із масштабними коефіцієнтами А і будують залежності Ас() і Ад()
![]() (3.45)
(3.45)
5. Обчисляють постійний момент рушійних сил Мд
![]() (3.46
)
(3.46
)
і в координатах кривої Mп() будують у масштабі М пряму Mд() паралельно осі абсцис.
6. Будують під графіками Ас() і Ад() у масштабах А і графік зміни кінематичної енергії Е(). Вісь ординат “Е” цього графіка служить продовженням осі ординат “А” графіків робіт і по цій осі для відповідних кутів повороту і вхідної ланки відкладають різницю ординат залежностей Ад() і Ас().
Таким чином, графіки моментів Mд() і Mн(), робіт Ад() і Ас() і зміни енергії Е() розташовуються друг під другом.
7. Будують в обраних масштабах j і графік приведеного моменту інерції Jn(), користуючись даними табл. 3.2. При цьому вісь абсцис розташовують вертикально, а вісь ординат J - горизонтально, як продовження осі абсцис графіків моментів.
8. Виключаючи графічно кут , будують діаграму Е - Jn. Для цього через ординати, що відповідають однієй і тій же абсцисі на кривих Е() і Jn(), проводять горизонтальну (для ординат кривої Е()) і вертикальну (для ординат кривої Jn()) лінії. Точка перетинання цих ліній визначить одну точку «петлі Вітенбауера» Е(Jn). Визначив усі 12 точок «петлі», з'єднують їх за допомогою лекала плавною кривою, одержуючи в масштабах А і J залежність, на якій горизонтальна вісь абсцис визначає розмір Jn, а вісь ординат - Е.
9. Під кутами max і min до осі Jn до зовнішніх точок петлі проводять дотичні AB і CD.
 (3.47)
(3.47)
10. Ці дотичні відтиняють на осі E відрізок BD, що відбиває в масштабі A найбільша зміна кінетичної енергії маховика протягом періоду сталого прямування машин.
Визначають момент інерції маховика по формулі:
![]() (3.48)
(3.48)
На приведеному в додатку малюнку показаний приклад побудови діаграми Виттенбауэра.
На листі, де накреслені графіки і петля Виттенбауэра, необхідно в масштабі вичертит маховик, параметри якого визначають відповідно до залежностей «3.38» і «3.39».
4. Синтез кулачкового механізму
Студент вирішує задачу синтезу кулачкового механізму, представивши розрахунок пояснительной записки, а графічну частину - на четвертому листі.
Кулачковые механізми служать для забезпечення необхідного закону прямування вихідної ланки силових механічних системах і системах керування машин і механізмів. Основні розміри кулачка в проекті визначають з умови обмеження рогу тиску, що виключає самогальмування механізму.
4.1. Вихідні дані для синтезу плоского кулачкового механізму
Схеми кулачкових механізмів
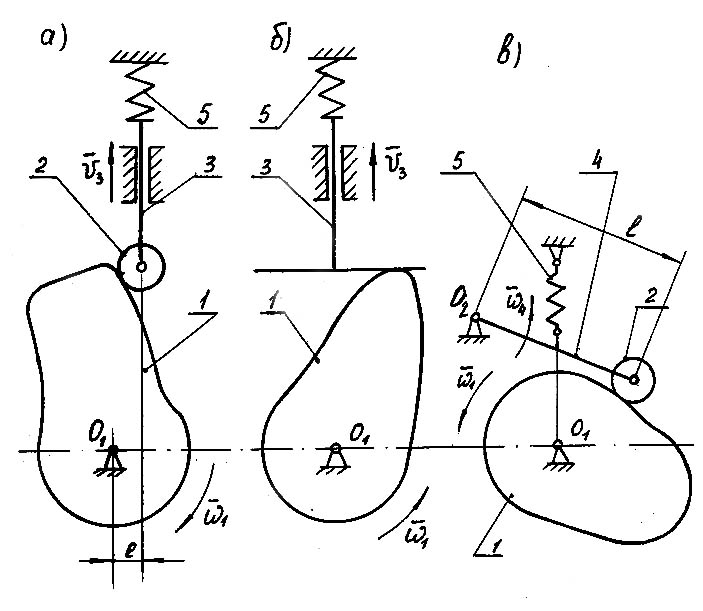
Мал.4.1
а), б) – з возвратно-поступальими рухомим товкачем;
в) – з хитним коромислом
кулачок; 2 – ролик; 3 – товкач; 4 – коромисло; 5 – пружина;
е – ексцентриситет; l – довжина коромисла.
У завданні на курсовий проект приведені такі, необхідні для синтезу кулачкового механізму, вихідні дані:
- схема кулачкового механізму /мал.4.1./ із движущет зворотно-поступально штовхачем (мал.4.1. а, б) або з коромислом, що чинить качательные прямування, (важелем) (мал.4.1. в);
- зсув “e” для штовхача, що поступально рухається, щодо центру обертання кулачка (мал.4.1. а);
- закон прямування кулачка (K =const);
- максимальне лінійне переміщення Smax штовхача (Smax=h ) або кутове переміщення (max) коромислом;
- закон зміни аналога прискорення штовхача (d2S/d2) або коромисла (d2/d2 ), де - ріг повороту кулачка;
- фазові роги повороту кулачка:
n- підйому або y- видалення штовхача (коромисла);
o - опускання або c зближення штовхача (коромисла);
вв - верхнього вистою або д- дальнього стояння штовхача (коромисла);
що-припускається ріг тиску доп ;
- довжина l коромисло підоймового кулачкового механізму.
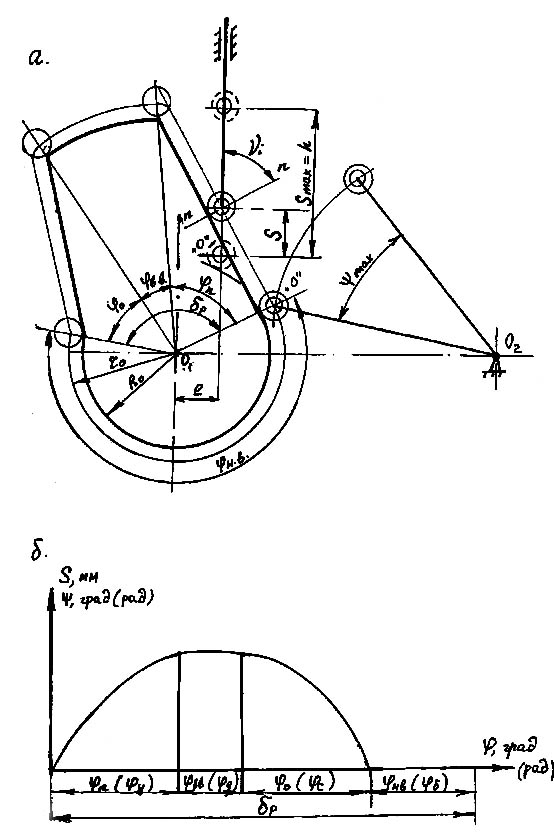
Для пояснення вихідних даних на мал.4.2.а показана сполучена схема кулачкового механізму зі штовхачем, що поступально рухається, і коромислом 2, на якій позначені фазові роги повороту ключа, що визначають ріг p робочого профілю:
p =n+o+вв (4.1 )
поточний ріг тиску і між нормаллю n-n в точці профілю кулачка й абсолютної швидкості точки контакту вихідної ланки; ріг нв нижнього вистою ( - ближнього стояння; початковий радіус кулачка Ro; теоретичний початковий радіус кулачка ro початковий радіус центрового профілю, що є траєкторії осі ролика у відносному його коченні по конструктивному профілі кулачка); початок відліку “o” переміщення S штовхача 2 і рогу повороту коромисла 2; поточне значення і рогу повороту кулачка.
На рис 4.2б без масштабу приведений графік переміщення S штовхача (рогу повороту коромисла) у функції рогу повороту кулачка за цикл (ц=2П ). Цю криву одержують із вихідних даних шляхом двухкратного графічного інтегрування залежності аналога прискорення, що буде розглянуто нижче (п.4.3).
4.2. Формулювання задачі проектування кулачкового механізму
Задачею синтезу кулачкового механізму є побудова профілю кулачка, виходячи з кінематичних, динамічних, конструктивних і технологічних вимог, запропонованих до машини. При рішенні цієї задачі послідовно здійснюють динамічний і кінематичний синтез кулачка
Задача динамічного синтезу кулачка - визначення мінімального радіуса профілю кулачка, при якому перемінний ріг тиску і в жодному положенні кулачкового механізму не буде перевищувати припустиме значення доп. У противному випадку, як відомо, відбудеться заклинювання кулачкового механізму.
При синтезі коромислового кулачкового механізму додатково вирішують задачу визначення відстані між центрами кулачка і коромисла О1О3 заданої довжини коромисла. Задача кінематичного синтезу кулачкового механізму полягає у визначенні (по заданим вихідним даним і на підставі результатів динамічного синтезу кулачкового механізму) теоретичного і дійсного профілів кулачка.
Сполучений кулачковий механізм.
Мал. 4.2
а – кінематична схема; б – графік переміщення товкача (кут повороту коромисла)
При цьому проектування профілю кулачка здійснюють загальними прийомами побудови взаимоогибает кривых.
У методичних указівках розглядаються принципи рішення задач синтезу кулачкового механізму для кінематичних схем, поданих на мал. 4.1 а і мал. 4.1 в.
4.3 Графічне інтегрування кінематичних діаграм
Для синтезу кулачкового механізму в якості вихідних даних повинна бути задана залежність S() лінійного переміщення штовхача (для штовхача, що зворотно-поступально рухається,) або залежність () кутового переміщення коромисла (для хитного прямування вихідного елемента). Як указувалося вище (п.4.1), для одержання цієї залежності необхідно двічі проинтегрировать вихідну функцію аналога прискорення d2S/d2(d2/d2) . Роздивимося принцип графічного інтегрування на прикладі інтегрування довільної функції d2у/dx2(у) , зображеної на мал. 4.3. Для цього:
- вісь абсцис у межах існування функції розбивають на деяке «К» число відрізків із рівним або нерівним кроком X , на яких роблять кусочно-лінійну апроксимацію вихідної функції (мал. 4.3);
- на кожному кроку виконують осреднение аппроксимированной функції за принципом рівності площі криволінійної трапеції і прямокутника, тобто визначають середини інтервалів “в”, “с”…;
- середнє значення ординати на кожному кроку (мал.4.3 а) (ab - на кроку ; O1-1, cd - на кроку 1-1 і т.д.) проектують на вісь ординат о1в =ав, о1d і т.д.);
- з'єднують довільно узяту точку (полюс) на продовженні осі з точками ;
- під графіком первообразной «у» проводять осі координат для що інтегрується функції «у» із початком координат O2 (мал.4.3 б);
- із точки O2 ( мал.4.3 б) проводять відрізок O2в в інтервалі паралельно променю H1d, відрізок вd в інтервалі 1-1 паралельно променю P1dі т.д.
Отримана ломаная крива ( у межі, при X0 - крива) у графічному виді являє собою з урахуванням масштабів, про які буде сказано нижче, інтеграл заданої залежності У/Х/ (тобто криву У/Х/ ).
Аналогічно, інтегруючи криву у/х/, одержуемо шукану інтегральну криву у/х/ . На графіку кривой у/х/ у якості полюса на осі Х (мал. 4.3. б) прийнята довільна точка (P2(O2P2=H2 ).
Для визначення довільних постійних інтегрування задають початкові умови: при X = 0; У= 0; У= 0.