

МИНИСТЕРСТВО ОБРАЗОВАНИЯ, НАУКИ, МОЛОДЕЖИ И СПОРТА УКРАИНЫ
ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Основы проектирования машин»
Курсовой проект по теории машин и механизмов на тему: «Спроектировать и исследовать рычажный, зубчатый и кулачковый механизмы»
Вариант № 1
Выполнил студент гр. Аленичев А. В.
Консультант Гордиенко Э. Л.
Руководитель проекта Гордиенко Э. Л.
Донецк – 2011
РЕФЕРАТ
Курсовой проект: 28 с., 6 рисунков, 11 таблицы, 3 приложения на листе формата А1.
Объектом проектирования и исследования является стержневой, зубчатый и кулачковый механизмы.
Цель работы – синтез и анализ этих механизмов.
Проведен синтез и анализ кинематических схем и характеристика механизмов конвейера.
При проектировании и исследовании механизмов использованы графические и аналитические методы с использованием ЭВМ.
МЕХАНИЗМ, СКОРОСТЬ, КУЛАЧОК, ЗУБЧАТАЯ ПЕРЕДАЧА, ЭВОЛЬВЕНТА, ПЛАНЕТАРНЫЙ МЕХАНИЗМ, ТОЛКАТЕЛЬ, ДИАГРАММА, ЗАЦЕПЛЕНИЕ, КОЛЕСО, РЕДУКТОР, МОМЕНТ.
СОДЕРЖАНИЕ
Введение …………………………………………………………………………4
Исследование стержневого механизма……………………………….....6
1.1 Структурный анализ механизма………………………………………6
1.2 Построение планов скоростей и планов ускорений………………….7
1.3 Аналитический расчет кинематических параметров………………...11
1.4 Определение масс звеньев, сил тяжести и центральных моментов инерции…………………………………………………………………………..13
1.5 Определение усилий в кинематических парах и уравновешивающего момента методом Бруевича………………………………………………….....14
1.6 Определение уравновешивающего момента способом Н.Е.Жуковского………………………………………………………...……….15
Проектирование цилиндрической прямозубой эвольвентой передачи…………………………………………………………………..16
2.1 Геометрический расчет параметров зацепления…………………….16
2.2 Проверки качества зубьев и зацепления………………………..……20
Проектирование и исследование планетарного механизма……….......22
3.1 Подбор чисел зубьев колес планетарного механизма…………........22
3.2 Определение угловых скоростей звеньев редуктора аналитическим методом……………………………………………………………………….....22
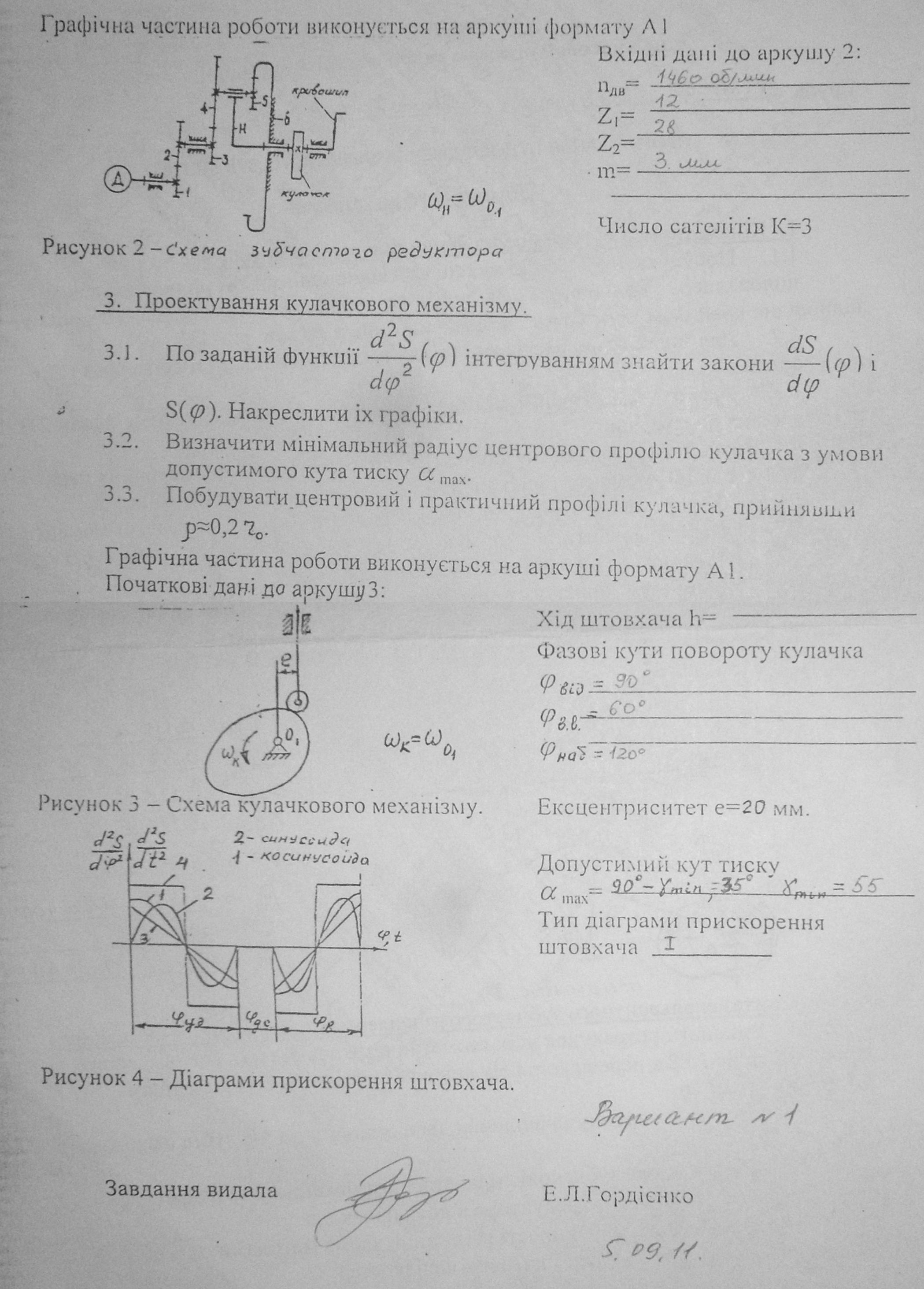
Проектирование кулачкового механизма …………………………...…24
4.1 Расчет законов движения толкателя и построение графиков …..….24
4.2 Построение центрового и действительного профилей кулачка……26
Выводы…………………………………………………………………….….…27
Перечень ссылок………………………………………………………………...28
ВВЕДЕНИЕ
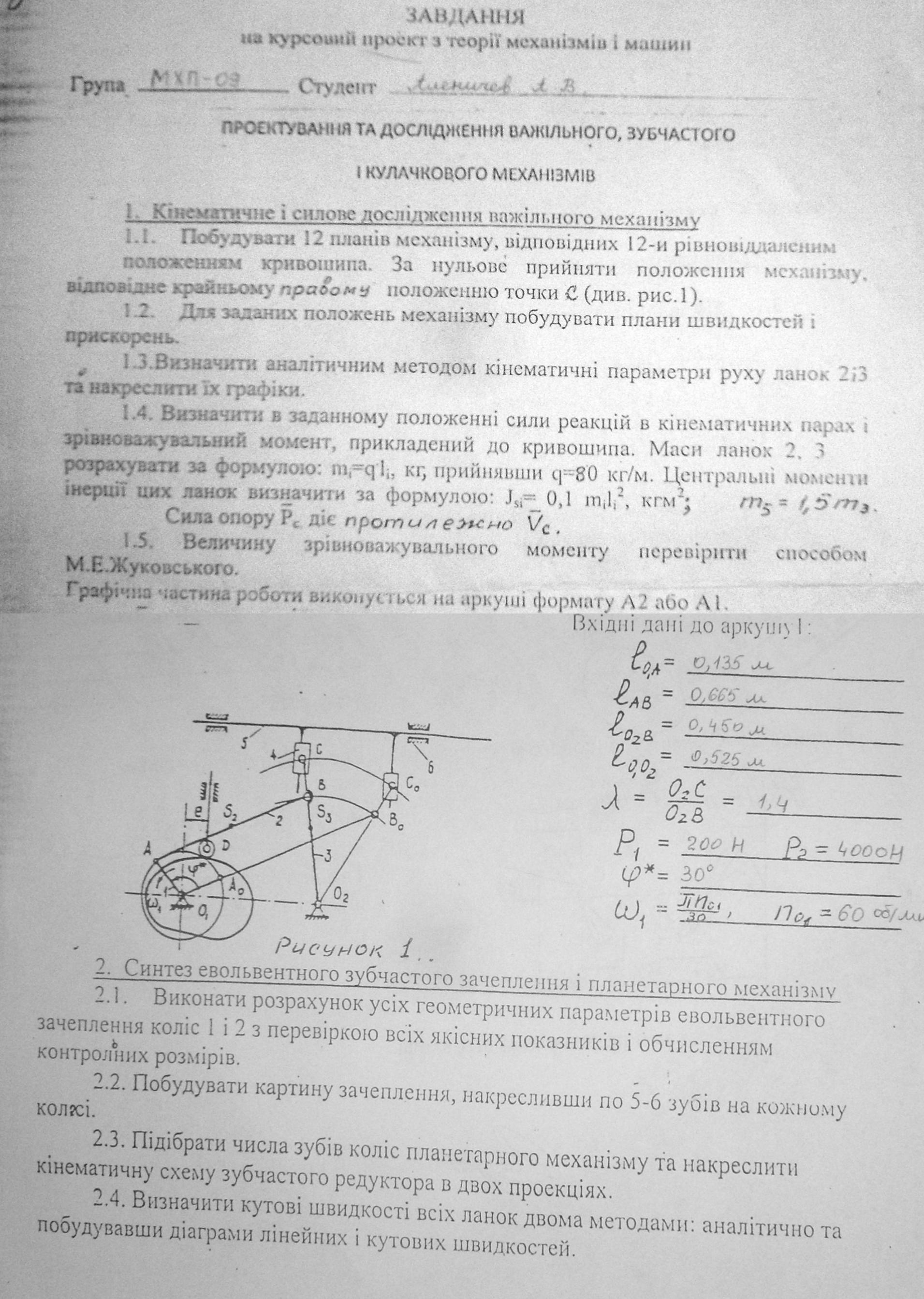
Исследование стержневого механизма
Структурный анализ механизма
Таблица 1.1 – Характеристика звеньев
-
№
звена
Название звена
Вид абсолютного движения звена
1
кривошип
вращательное
2
шатун
плоскопараллельное
3
коромысло
возвратно - вращательное
4
ползун
плоскопараллельное
5
кулиса
возвратно - поступательное
6
стойка
неподвижная
Анализ кинематических пар:
1-6: низшая, плоская, одноподвижная;
1-2: низшая, плоская, одноподвижная;
2-3: низшая, плоская, одноподвижная;
3-4: низшая, плоская, одноподвижная;
3-6: низшая, плоская, одноподвижная;
4-5: низшая, плоская, одноподвижная;
5-6: низшая, плоская, одноподвижная.
Данная кинематическая цепь замкнутая (т.к. все звенья входят не менее чем в две кинематические пары), плоская (т.к. каждое звено относительно всех остальных звеньев совершает плоское движение) и сложная (т.к. звено 3 входит в три кинематические пары).
Так как данный механизм плоский для вычисления числа степеней свободы можно использовать формулу Чебышева:
W = 3 × n – 1P1 – 2P2,
где W – число степеней свободы механизмов,
n – число подвижных звеньев,
P1 – количество одноподвижных пар,
P2 – количество двухподвижных пар.
W = 15 -14 = 1