

II техническая характеристика
Двигатель:
асинхронный, трехфазного тока, тип 4АМ160S4УЗ, исполнение закрытое обдуваемое, мощность- 15 кВт, частота вращения вала – 1465 мин -1 , диаметр выходного конца вала 38,5 мм.
Открытая передача:
Клиноременная, сечение ремня Б, число ремней z=5, длина ремня L=2800 мм,
Редуктор:
Одноступенчатый
цилиндрический горизонтальный,
прямозубый, межосевое расстояние 250 мм,
передаточное число
![]() ,
подшипники
– радиальные однорядные.
,
подшипники
– радиальные однорядные.
III описание и обоснование выбранной конструкции
Согласно заданию, полученному для расчета, привод включает в себя цилиндрический прямозубый редуктор и клиноременную передачу, также для передачи вращающего момента с выходного вала на вал винтового питателя в привод включаем муфту (МУВП).
Клиноременная передача, согласно условию, применяется в заданной кинематической схеме для понижения угловой скорости приводного вала и занимает место между электродвигателем и редуктором. При расчете необходимо выбрать тип ремня и определить: размеры шкивов, длину и количество ремней, межосевое расстояние.
Редуктор предназначен для понижения угловой скорости и повышения вращающего момента ведомого вала по сравнению с ведущим. Зубчатые колеса – прямозубые, редуктор – горизонтальный. Валы редуктора монтируются на подшипниках качения.
Муфту в заданном расчете выбирают стандартную – МУВП, в зависимости от диаметра выходного конца вала.
IV РАСЧЕТЫ, ПОДТВЕРЖДАЮЩИЕ РАБОТОСПОСОБНОСТЬ ИЗДЕЛИЯ
Кинематический расчет привода
Схема привода
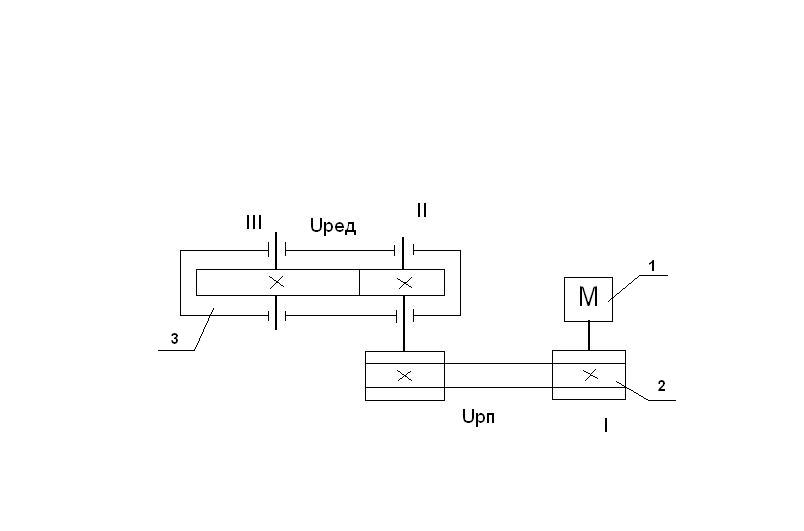
Рисунок 1.1 – Схема привода
1 – Электродвигатель
2 – Открытая ременная передача
3 – Редуктор
Задача расчета
Подобрать электродвигатель по номинальной мощности и частоте вращения ведущего вала.
Определить общее передаточное число привода и его ступеней.
Определить мощность, частоту вращения, угловую скорость и вращающий момент на каждом валу привода.
Данные для расчета
Мощность на выходном валу (Рвых=12 кВт).
Частота вращения (nвых=200 об/мин).
Условия расчета
Для устойчивой работы привода необходимо соблюдение условия: номинальная (расчетная) мощность электродвигателя должна быть меньше или равна мощности стандартного электродвигателя
Рном ≤ Рдв
Допускаются отклонения:
Рном > Рдв на 5%
Рном < Рдв до 10%
Расчет привода
Двигатель является одним из основных элементов машинного агрегата. От его мощности и частоты вращения его вала зависят конструктивные и эксплуатационные характеристики рабочей машины и ее привода.
1.5.1 Определяем общий КПД по формуле:
ηобщ = ηрп · ηпп · ηзп· ηпп (1.1.)
где ηрп =0,95 – КПД ременной передачи;
ηзп =0,97 – КПД зубчатой передачи;
ηпп =0,99 – КПД пары подшипников.
ηобщ =0,95*0,99*0,97*0,99=0,90
1.5.2 Определим требуемую мощность электродвигателя:
Рном = Рвых/ ηобщ
Рном = 12/0,9 = 13.33 кВт
По значению номинальной мощности, по таблице выбираем электродвигатель большей мощности:
Рном = 15 кВт
Выбор оптимального типа двигателя зависит от кинематических характеристик рабочей машины и производится после определения передаточного числа привода и его ступеней. При этом надо учесть, что двигатели с большей частотой вращения (синхронной 3000 мин-1) имеют низкий рабочий ресурс, а двигатели с низкими частотами (синхронной 750 мин-1) весьма металлоемки, поэтому их нежелательно применять без особой необходимости в приводах общего назначения малой мощности.
Для расчета выбираем двигатель серии 4АМ160S4УЗ с номинальной мощностью 15 кВт и номинальной частотой вращения 1465 мин-1.
1.5.3 Определение передаточного числа привода.
Передаточное число привода (Uобщ) определяется отношением номинальной частоты вращения двигателя (nном) к частоте вращения приводного вала рабочей машины (nрм) и равно произведению передаточных чисел редуктора (Uред) и ременной передачи (Uрп).
Uобщ =nдв/nвых = Uрп · Uред
Uобщ =1465/200=7,325
Uр.п =3.66
Uред=Uобщ/Uрп
Uред=7.325/3.66=2
Чтобы габариты передачи не были чрезмерно большими, нужно придерживаться некоторых средних значений Uзп, Uрп, по возможности не доводя их до наибольших, допускаемых лишь в отдельных случаях.
1.5.4. Определение силовых и кинематических параметров привода.
Силовые (мощность и вращательный момент) и кинематические (частота вращения и угловая скорость) параметры привода рассчитывают на валах исходя из требуемой (расчетной) мощности двигателя Pдв и его номинальной частоты вращения nном.
Определим мощности на каждом валу привода:
Р1 = Рдв = 15 кВт
Р2 = Р1 · ηрп · ηпп = 15*0,95*0,99 = 14,11 кВт
Р3 = Р2 · ηпп · ηзп = 14,11*0,99*0,97 = 13,55 кВт
Определяем частоту вращения каждого вала:
n1 = nдв= 1465 мин-1
n2 = nдв/Uрп = 1465/3,66 = 400 мин-1
n3 = n2/Uред = 400/2 = 200 мин-1
Определяем угловые скорости каждого вала:
ω1 = π·n1/30 = 3,14*1465/30 = 153 с-1
ω2 = π·n2/30 = 3,14*400/30 = 77 с-1
ω3 = π·n3/30 = 3,14*200/30 = 21 с-1
Определяем вращающий момент для каждого вала:
Т1 = Р1·103/ω1 = 15*103/153 = 98 Н·м
Т2 = Р2·103/ω2 = 14,11*103/77 = 183 Н·м
Т3 = Р3·103/ω3 = 13,55*103/21 = 645 Н·м
Результаты расчетов сводим в таблицу 1.1
Таблица 1.1 – Силовые и кинематические параметры привода.
Вал |
Мощность Р, кВт |
Частота вращения n, мин-1 |
Угловая скорость ω, с-1 |
Вращающий момент Т, Н·м |
1 |
15 |
1465 |
153 |
98 |
2 |
14,11 |
732,5 |
77 |
183 |
3 |
13,55 |
200 |
21 |
645 |
Заключение: анализ силовых и кинематических расчетных параметров, приведенных в таблице 1.1, показывает, что проектируемый привод обеспечивает значение заданных выходных параметров, Рвых и nвых соответствующих техническому заданию.