

6.8 Екстремальні регулятори
Дія екстремального регулятора зводиться до відшукання екстремума статичної характеристики об'єкту і підтримки регулюючого параметра поблизу знайденого екстремального значення (49, роз. 7). Відшукання екстремуму здійснюється методом пошуку, який можна організувати різними способами. Відомо, що екстремумом функції y=f(x) називаються такі її значення f(хе), для яких справедливі наступні нерівності [39]: f(xе+h)<f(xе)—для випадку максимуму; f(xе + h)>f(xе) —для випадку мінімуму при будь-яких малих значеннях h, позитивних і негативних.
Очевидно, що для визначення екстремального значення функцій необхідно перевірити або приріст функції при позитивних і негативних h, або поведінку похідної справа і зліва від передбачуваної точки екстремуму. Виходячи з цього розроблено два основні способи пошуку екстремуму.
Пошук по приросту полягає в тому, що при переміщенні робочої точки по характеристиці об'єкту визначається приріст цієї функції, відповідне приросту вхідного сигналу об'єкту. Якщо характеристика досягає екстремуму, то при подальшій зміні вхідного сигналу приріст змінить знак. Під час переходу через максимум приріст стане з додатнього від’ємним [f(xе+h)<f(xе)], а під час переходу через мінімум — навпаки. Тоді правильним напрямом руху при пошуку максимуму буде те, якому відповідають позитивні прирости вихідної величини, а при пошуку мінімуму — негативні.
Пошук по похідній полягає у формуванні управляючого сигналу за наслідками вимірювання крутизни характеристики об'єкту в даній точці. Якщо похідна досліджуваній функції по вхідному параметру позитивна, то для досягнення максимуму необхідно збільшити вхідний сигнал об'єкту, а для досягнення мінімуму — зменшити його. Під час переходу через екстремум похідна міняє знак.
Відомо декілька методів організації пошуку. Пошук по приросту звичайно реалізується або методом запам'ятовування екстремуму, або кроковим методом. Пошук по похідній здійснюється або вимірюванням похідних за часом, або використовуванням періодичного пошукового сигналу (з модуляцією). В пневматичних екстремальних регуляторах використовується пошук по приросту, реалізовуваний методом запам'ятовування екстремуму або кроковим методом.
Метод запам'ятовування екстремуму полягає у використовуванні різниці між поточним і екстремальним значеннями характеристики об'єкту для знаходження моменту реверсу системи. Для визначення екстремального значення регулюючого параметра використовується запам’ятовуючий, пристрій. Пошук по методу запам'ятовування ілюструється графіком, показаним на рис. 6.47. Припустимо, починаючи з моменту t0 під дією регулюючої дії у регулюючий параметр хТ починає зростати. Запам’ятовуючий, пристрій стежить за цією зміною. Як тільки величина хт досягне свого максимального значення хтах, запам'ятовуючий пристрій зафіксує цю величину, і при зменшенні хТ значення хЗ—хтах, що запам'яталося, залишається незмінним. При хT = хmax система продовжує рухатися в тому ж напрямі протягом деякого часу, визначуваного зоною нечутливості регулятора .
У момент t1, коли різниця між хЗ, що запам'яталося, і поточним хТ значеннями регулюючого параметра стане рівний (х3-хТ=), система реверсує. Надалі принцип пошуку екстремуму повторюється. Таким чином, регулятор скоюватиме «рискання» з постійною швидкістю у екстремального значення регулюючого параметра хтах.
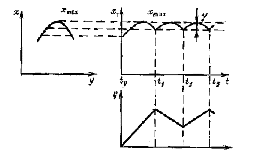
Рисунок 6.47 – Графік пошуку по методу запам'ятовування екстремуму
Кроковий метод пошуку екстремуму ілюструється графіками, показаними на рис. 6.48. В такій системі через рівні проміжки часу (кроки), що задаються імпульсним елементом, здійснюються примусові регулюючі дії у і вимірюється різниця значення вихідної величини, що запам'яталося, за попередній крок х3 з її новим значенням хТ. При хТ1>хЗ0, що означає, що вихідна величина збільшується, здійснюється нова регулююча дію у, в запам’ятовуючий пристрій заносяться нове значення х31, яке порівнюється із значенням регулюючого параметра хт2 і т.д.
При хт = хmах система продовжує рухатися в тому ж напрямі протягом деякого часу, визначуваного зоною нечутливості регулятора . У момент часу t1, коли різниця між значенням х3 і поточним значенням хт, що запам'яталося на попередньому кроці, регулюючого параметра стане рівною (хз—хТ = ), система реверсує. При цьому знову по команді імпульсного елементу регулюючу дію змінюється кроками у і вимірюється різниця х3—хТ. В результаті регулятор підтримує екстремальне для даних умов значення регулюючого параметра, не даючи йому відхилитися на величину, що перевищує зону нечутливості.
Пневматичний самоналагоджувальний регулятор АРС (рис. 6.49) працює за принципом запам'ятовування екстремуму і призначений для підтримки оптимального режиму роботи малоінерційних технологічних процесів [6]. Всі елементи, що входять до складу регулятора, утворюють три функціональні блоки: порівняння і запам'ятовування, інтегратора, обмеження.
По схемі на рис. 6.49 регулятор налаштовано на пошук максимуму. Розглянемо принцип дії регулятора. Блок порівняння і запам'ятовування утворюється елементами з VII по XV.

Рисунок 6.48 – Графік крокового методу пошуку
Пневматичний сигнал під дією тиску стиснутого повітря рх, пропорційним поточному значенню регулюючому параметрами, через повторювач з зсувом ІХ поступає в камеру В елементу порівняння ХІІІ, в камери Д і К елемента пам’яті VIII і в камеру А повторювача з запам’ятовуванням VII.
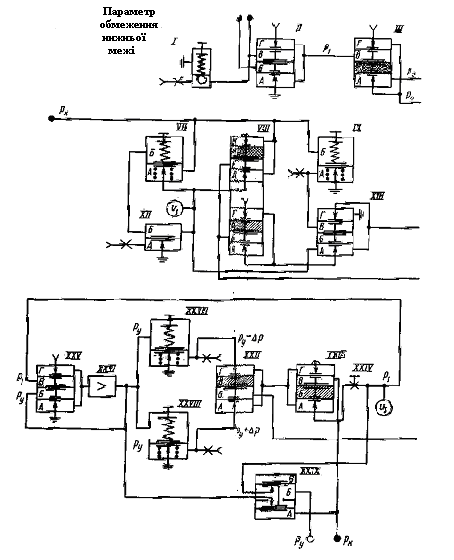
Рисунок 6.49 – Самоналагоджувальний регулятор АРС
Час затримки регулюється змінним опором XV.
Імпульс рІ, потрапивши в камеру БVIII, відкриває сопло в камері АVIII, з‘єднуючи цю камеру з атмосферою. Вихідний сигнал елементу XIII скидається до 0, тобто імпульс рІ усуває можливість помилкового спрацьовування імпульсатора.
Крім того, імпульс рІ чинить перезапам’ятовування тиску рЗ. Проходячи в камеру ЕVІІІ, імпульс РІ відкриває сопло в камері ДVІІІ, через який поточний тиск рх поступає в повторювач XII і в камеру БVІІ.
Блок інтегратора утворюється елементами XVI—XXVIII. Імпульс рІ з виходу блоку порівняння і запам'ятовування проходить на вхід тригера через сопло в камері -ГXVI, відкрите під дією сигналу «1», що поступає від кнопки XVIII. Тригер утворюється елементами XIX, XX і X-XI (50 цього розділу). Стан тригера залежно від сигналу рІ:
РІ.............0 1 0 1
рт............ 0 1 1 0
Рт............ 1 0 0 1
рП............ 1 1 0 0
Відповідно до схеми на рис. 6.49 використовується один вихід тригера, по якому сигнал рт поступає в камеру Б реле XXII. Якщо рт=1, то закрите сопло в камері ГХХІІ і відкрите сопло в камері АХХІІ. В результаті реле XXII пропускає через камеру АХХІІ сигнал ру+р з виходу повторювача XXVIII з позитивним зсувом. Якщо рт = 0, те реле XXII пропускає через камери. ГХХІІ і АХХІІ сигнал Ру—р з виходу повторювача XXVII з негативним сзувом.
Блок власне інтегратора (елементи XXII—XXVIII) зібраний по схемі інерційної ланки (змінний опір XXIV і місткість V3), охопленої позитивним зворотним зв'язком через підсилювач XXV, включений по схемі суматора. Дійсно, суматор XXV в рівновазі при
![]() (6.134)
(6.134)
Рівняння інерційної ланки XXIV—V3, наприклад, при включенні повторювача XXVIII з позитивним зсувом матиме вигляд
![]() (6.135)
(6.135)
Підставивши (6.134) в (6.135), одержимо
![]() (6.136)
(6.136)
Таким чином, під час вступу імпульсу рт=1 вихідний сигнал регулятора ру змінюватиметься з постійною швидкістю, визначуваною при р = const величиною постійної часу Т1, тобто ступенем відкриття опору XXIV. Змінюючи ступінь відкриття опору XXIV, можна змінювати швидкість зміни ру.
Вихідний сигнал тригера рт міняє свою величину під час вступу імпульсу рІ=1. Отже, підключення повторювачів з позитивним або з негативним зсувом і тим самим реверс вихідного параметра ру регулятора наступають при появі імпульсу рІ, тобто при р3—рх = у.
Блок обмежень утворюється елементами з 7 по VI. Він передбачає видачу імпульсу рІ, а отже, і реверс регулюючої дії ру при досягненні якими-небудь іншими параметрами процесу значень вище або нижче допустимих величин.
Елемент порівняння ІІ працює на обмеження нижньої межі, а елемент порівняння IV — на обмеження верхньої межі. Величини обмежень задаються задатчиками і V.
Параметр, величина якого повинна бути обмежена знизу, поступає в камеру БVI. Поки параметр залишається більшим тиску обмеження, сопло в камері ГVI закрите і на виході елементу порівняння II pi = 0. При цьому р4 = 0 і ре = 0.
При зменшенні параметра до величини обмеження pi = l, р4 = 1 і через сопло в камері A\i на елемент X пройде сигнал Рб=1. Цей сигнал відкриє сопло в камері ах і через сопло в камері Aiv пройде на вхід дискретного елементу пам'яті XI. В результаті утворюється імпульс рi=1 і відбувається реверс регулюючої дії ру. Аналогічно працює схема при обмеженні верхньої межі і третього параметра.
Для екстреного реверсу передбачена кнопка XVIII, при включенні якій припиняється подача сигналу в камеру Вxvi.
Настроювальні параметри регулятора можна змінювати в наступних межах: зона нечутливості у=1,5—6,0 кПа, час затримки імпульсу рi Т=2—1800 с, швидкість пошуку V=0,2—60 кПа/хв.
Пневматичний самоналагоджувальний регулятор APC-2-OИ (рис. 6.50) працює по кроковому методу і призначений для підтримки оптимального режиму роботи інерційних об'єктів [6]. Регулятор складається з трьох функціональних блоків: блоку імпульсного запам'ятовування і порівняння, блоку інтегратора і блоку обмежень (на схемі не показаний). По схемі рис. 6.50 регулятор налаштовано на пошук максимуму. Розглянемо принцип дії регулятора.
Блок імпульсного запам'ятовування і порівняння, що включає елементи І—XI, призначений для порівняння поточного рх і що запам'ятав тиск р3 , видачі командного сигналу ра і для генерації імпульсів, що забезпечують кроковий пошук екстремуму.
Тиск рг через повторювач І із зсувом поступає в камеру В елементу порівняння ІІ. Одночасно воно проходить в камери А до Г безперервного елементу пам'яті ІІІ. У момент включення регулятора в роботу тиск в камері б рівно атмосферному. Сопло в камері АI під дією підпору в камері Вт відкрито, і тиск рх потрапляє в камеру запам'ятовування Дт, об'єм якої збільшений за рахунок місткості V.
Вихідним тиском елементу ІІІ є тиск ра, який формується в камері XIII шляхом відстежування тиску pi, що поступає в камеру ДIII.
Якщо сопло в камері АI закрито, то р3 рівно тому значенню рх, яке було в камері ДIII у момент закриття сопла.
Для формування рівномірно чергуючих імпульсів стислого повітря «0» і «1», що забезпечують кроковий пошук екстремуму, служить генератор з імпульсатором (53 цього розділу).
Генератор (елементи X, XI, уз, Vt) і імпульсатор (елементи VІI, IX) формують імпульс ра, який управляє роботою елементів III і IV, а також, проходячи через елемент V (операція НЕ), роботою елементу порівняння ІІ.
При видачі імпульсу ра=1 сопло в камері Лга закрито, а сопло в камері av відкрито. Тиск р3, що запам'ятав на попередньому кроці, проходить в камеру Б елементу порівняння. Проте, так-як сигнал на виході елементу У(НЕ) ра = 0, живлення до сопла в камері ац не підводиться. При ра=0 (ра=1) сопло в камері АІ відкривається, тобто відбувається зняття значення р3, що запам'ятало, на попередньому кроці. Сопло в камері Av закривається, а до сопла камери АІІ підводиться живлення від елементу V.
Якщо ра—рх<у, сопло в камері АІ закрито і тиск на виході елементу порівняння рівний нулю. При ра—рх=у сопло в камері АІІ відкривається, на виході елементу порівняння з'являється сигнал рі=1, який через проміжне реле VI поступає на вхід блоку інтегратора.
Величина у —зона нечутливості регулятора—задається за допомогою повторювача І із зсувом. Введення цієї складової запобігає передчасному спрацьовуванню елементу порівняння і, отже, помилковий реверс вихідного параметра регулятора.
Блок інтегратора призначений для зміни величини і напряму вихідного тиску ру регулятора по команді рі елементу порівняння. Командний імпульс рі поступає на тригер, утворений елементами XII і XIII і має один вихід рт. Полягання тригера при зміні командного сигналу рІ:
рІ............. 0 1 0 1
рт............. 0 1 1 0
рП.............1 1 0 0
Тригер міняє своє стан лише при появі командного імпульсу рІ.
Вихідний сигнал тригера рт управляє роботою реле КУШ, яке сполучає вихідну лінію регулятора ру з одним з двох повторювачів із зсувом XVI або XVII. Елемент XX побудований так, що він зменшує вихідний тиск на постійну величину Ар, а елемент VII — збільшує його на величину Ар за кожний крок.
Вихідний тиск регулятора ру формується в камері А елементу пам'яті XV, з якого воно проходить в камери б повторювачів XVI і XVII. Вихідні камери повторювачів сполучені з верхнім і нижнім соплами реле VIII.

Рисунок 6.50 – Самоналагоджувальний регулятор АРС
При рт = 0 і ра=1 (рис. 6.50) сопло в камері Вxiv закрито, а сопло в камері Бxv відкрито. На виході регулятора маємо сигнал ру, який проходить через повторювач із зсувом VII і у вигляді ру+р— через нижнє сопло реле XVIII — камеру БХІV елементу пам'яті. При ра = 0 сопло в камері BXIV відкривається, а в камері Бxv закривається. Тиск ру + р запам'ятовується в камері БXIV. Далі, якщо сигнал на виході тригера не міняється (рт=0), до вихідного сигналу (ру+р) знову додається величина Ар. В мить, коли р3—px = y> рі=1, тригер міняє свій стан (рт=1) і перемикає реле XVIII, підключаючи повторювач з негативним зсувом XVI. З вихідного сигналу відніме величина Ар, яка через елемент пам'яті XIV пройде на вихід. Таким чином, при зміні стану тригера проходить реверс зміни вихідного сигналу ру. Тепер при кожному кроці вихідний тиск зменшуватиметься на величину р до наступної зміни стану тригера. Робота регулятора ілюструється графіками, приведеними на рис. 6.51.
Сигнал про вихідний тиск після підсилення за допомогою двохсоплового підсилювача XIX і підсилювача потужності XX проходить через вимикаюче реле XXI. При переході на ручне управління до регулятора під водиться сигнал рк=1. Блок обмежень, який повністю аналогічний відповідному блоку регулятора АРС і тому не показаний на рис. 6.50 видає сигнал рк=1 при виході яких-небудь інших параметрів за задані межі. В цьому випадку формується сигнал ра=1 і відбувається реверс вихідної величини регулятора.
Набудовані параметри регулятора можна змінювати в наступних межах: зона нечутливості Y=l>5—6,0 кПа, крок імпульсу (період коливань генератора) 1—60 хв; тривалість періоду порівняння (імпульсу ра) 1—60 с.
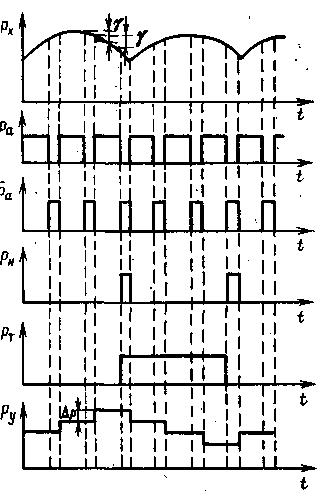
Рисунок 6.51 – Графіки, відображаючі принцип дії регулятора АРС-2-ОИ
7 СХЕМИ АВТОМАТИЧНОГО РЕГУЛЮВАННЯ ОСНОВНИХ ТЕХНОЛОГІЧНИХ ПАРАМЕТРІВ
До основних параметрів у технологічних процесах нафто-газовидобування, транспортування і переробки нафти та газу належать витрата, тиск, рівень, температура, якісні показники. Системи автоматичного курування типовими технологічними процесами реалізовані згідно ГОСТ 21.404.85. Умовні позначення засобів автоматизації згідно ГОСТ 21.404.85 приведені в додатку А.