

Умова рівноваги елементу порівняння матиме вигляд
хт –хз +рВ –рБ =0; (6.75)
рБ – рВ = хт –хз. (6.76)
Для суматорів в лінії зворотного зв'язку
 (6.77)
(6.77)
Звідси відміність
![]() (6.78)
(6.78)
або
![]() (6.79)
(6.79)
Отже
![]() (6.80)
(6.80)
Підставивши (5.53) в (5.49), одержимо
![]() (6.80)
(6.80)
або
![]() (6.81)
(6.81)
де
![]() (6.82)
(6.82)
Об'єднавши рівняння (5.46) і (6.81), одержимо рівняння всього пристрою:
![]() (6.83)
(6.83)
де
![]() (6.84)
(6.84)
Коефіцієнт підсилення К можна змінити з допомогою змінних опорів і . Дійсно, при = 0 К1 = 1, тоді, якщо = 0, то К2=1; К=1, =100 %; якщо =1, то К20, К; 0 (для даного пристрою = 2 %), при =0 К2=1, тоді, якщо =0, то К1 = l, К=l; =100 %; якщо =1, то К10, К0, (для даного пристрою = 3000 %).
Таким чином, для настройки межі пропорційності [= (1/К) 100 %] в зоні = 2—100 % необхідно закрити опір і міняти ступінь відкриття опору , а для настройки в зоні =100—3000% необхідно закрити опір і міняти ступінь відкриття опору . Вихідний сигнал елементу порівняння I поступає через підсилювач потужності III на вимикаюче реле IV, яке служить для відключення регулятора при переході на ручне управління.
Для гасіння автоколивань, що виникають при роботі пристрою, перед камерою ДІІІ встановлене постійний опір. Структурна схема регулюючого пристрою, що побудована на підставі рівнянь (5.46) і (6.81), показана на рис. 6.39. Передавальна функція пристрою щодо розузгодження
 (6.85)
(6.85)
При Ку
![]() . (6.86)
. (6.86)
Пропорційно-інтегральний (ПІ) регулюючий пристрій з лінійними статичними характеристиками ПРЗ.31 (рис. 6.40) складається з п'ятимембранного І і трьохмембранного IV елементів порівняння (підсилювачів), суматорів на опорах ІІ і ІІІ, підсилювача потужності V, повторювача VI і двох вимикаючих реле VII і VIII. Сигнал хТ, пропорційний поточному значенню регульованого параметра, поступає в камеру В, а сигнал х3, пропорційний його заданому значенню, - в камеру Б елементу порівняння І. Вихідний сигнал p1 елементу порівняння І поступає через вимикаюче реле VII на вхід інерційної ланки (опір А, місткість V) і одночасне на вхід суматора ІІ. Вихідний сигнал інерційної ланки хі подається на елемент порівняння І (камера Д) як додатній зворотний зв'язок. На вхід суматора на опорах ІІ окрім сигналу р1 поступає сигнал хі, а на вхід суматора ІІІ — сигнали хі і хвих. Схема побудована так, що працюють або суматор ІІ при =l.ІІІ=0. або сумматор ІІІ при =1, ІІ = 0.
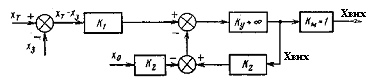
Рисунок 6.39 – Структурна схема регулюючого пристрою ПР2.8
Знайдемо рівняння регулятора при повністю відкритому опорі (=1, .ІІІ= 0).
Умови рівноваги суматора І:
![]()
![]() (6.87)
(6.87)
Рівняння інерційної ланки
![]() (6.88)
(6.88)
Підставивши (6.87) в (6.88), одержимо
![]() (6.89)
(6.89)
або
![]() (6.90)
(6.90)
Рівняння суматора ІІ
![]() (6.91)
(6.91)
З врахуванням (6.87) одержимо
![]() (6.92)
(6.92)

Рисунок 6.40 – Пропорційно-інтегральне регулюючий пристрій з лінійними статичними характеристиками ПРЗ.31
Звідки
![]() (6.93)
(6.93)
Рівняння суматора IV за умови =1; ІІІ = 0
![]() (6.94)
(6.94)
Звідки
![]() (6.95)
(6.95)
де
![]() (6.96)
(6.96)
Розглянемо випадок, коли опір повністю відкритий (=1; ІІ=0).
Рівняння суматора ІІІ
![]() (6.97)
(6.97)
Умова рівноваги суматора IV
![]() (6.98)
(6.98)
За умови =1; ІІ=0
р2 = хТ—хЗ + хІ. (6.99)
Підставивши (6.98) і (6.99) в (6.97), одержимо
![]() (6.100)
(6.100)
звідки
![]() (6.101)
(6.101)
де
![]() (6.102)
(6.102)
Об’єднавши (6.90), (6.95) і (6.101), одержимо загальне рівняння регулюючого пристрою ПРЗ.31:
![]() (6.103)
(6.103)
![]() (6.104)
(6.104)
вихідний сигнал елементу порівняння IV поступає на вхід підсилювача потужності V, а потім на вимикаюче реле VII. Реле VII і VIII служать для переходу з автоматичного регулювання на ручне. При подачі командного імпульсу рк=1 вихід елементу І відключається від входу інерційної ланки (,V) відключається регулятор, а лінія виконавчого механізму з'єднується з камерою Д1 додатнього зворотного зв'язку. Таке включення оберігає лінію виконавчого механізму від стрибка тиску при переході з ручного регулювання на автоматичне. Постійний опір на вході Дv служить для гасіння автоколивань, що виникають при роботі регулятора.
Настройка коефіцієнта підсилення K=K1/К2 регулятора і -межі пропорційності здійснюється за допомогою змінних опорів і суматорів ІІ, ІІІ. При =1, ІІ=0, К1=1. Коефіцієнт підсилення регулятора К= 1/К2, а отже, і межа пропорційності міняються за допомогою опору (= 2—100 %); при =l. ІІІ = 0; К2=1. Коефіцієнт підсилення К=К1 і межа пропорційності міняються за допомогою опору ( =100—3000)%.
Час інтеграції Ті міняється за допомогою опору , Ті=0,05—100 хв. Шляхом структурних перетворень схема регулюючого пристрою ПРЗ.31 (рис. 6.41) може бути приведена до стандартного виду схеми ПІ-регулятора, представляючої собою паралельно включені інтегруючі і підсилювальні ланки (рис. 6.42, ж.
Розглянемо випадок, коли =l, а ІІІ=0. Інерційна ланка, охоплена додатнім зворотним зв'язком (рис. 6.42,а), перетвориться в інтегруючу ланка (рис. 6.42,6). При переносі місця приложення сигналу хі (пропорційна частина загальної схеми) з входу ланки з коефіцієнтом підсилення /( + ) (рис. 6.42 , в) на його вихід з множенням на коефіцієнт /( + )) одержимо схему на рис. 6.42 ,г, а потім схему на рис. 6.42 , д. Передавальна функція ділянки схеми, що включає підсилювач IV, охоплений одиничним від’ємним зворотнім зв'язком (рис. 6.42, е), буде рівна 1. Об'єднуючи рис. 6.42, б, д і е, одержимо схему, показану на рис. 6.42, ж, тобто передавальна функція регулюючого пристрою
![]() (6.105)
(6.105)

Рисунок 6.41 – Структурна схема регулюючого пристрою ПР3.31
Рисунок 6.42 – Структурні перетворення схеми регулюючого пристрою ПР3.31
Застосувавши аналогічний прийом, при =1 і ІІ = 0 одержимо схему, показану на рис. 6.42, з.
Передавальна функція регулюючого пристрою
![]() (6.106)
(6.106)
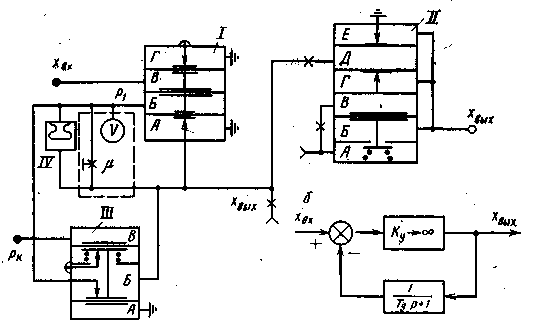
Рисунок 6.43 – Регулюючий пристрій прямого передування
ПФ2.1
Об'єднуючи (6.105) і (6.106), можна записати передавальну функцію пристрою щодо розузгодження у вигляді
![]() (6.107)
(6.107)
де
(6.108)
Регулюючий пристрій прямого передування ПФ2.1 (рис. 6.43, а) складається з підсилювача (елементу порівняння) І, підсилювача потужності II, інерційної ланки (ц, V), вимикаючого реле ІІІ і ємності з сильфоном IV.
Вхідний сигнал хвх поступає в камеру В елементу I, а вихідний сигнал хвих, проходячи через інерційну ланку (, V), поступає в камеру Б у вигляді тиску повітря р1
У стані рівноваги
![]() (6.109)
(6.109)
Рівняння інерційної ланки
![]() (6.110)
(6.110)
Підставивши (6.109) в (6.110), одержимо
![]() (6.111)
(6.111)
У разі, коли швидкість зміни вхідного сигналу рівна нулю або близька до нього, на виході пристрою відстежується вхідний сигнал.
При збільшенні вхідного сигналу, наприклад, з постійною швидкістю збірка мембран елементу порівняння (підсилювача) І переміститься вниз і тиск на виході різко підвищиться, причому з деяким випередженням по відхиленню до вихідного сигналу. Випередження буде тим більше, чим більша швидкість зміни вхідного сигналу і чим менша ступінь відкриття опору . Із зменшенням швидкості зміни вхідного сигналу випередження зменшиться і повністю зникне, коли вхідний сигнал перестане змінюватися. Сигнал з виходу елементу порівняння І проходить на підсилювач потужності ІІ. Місткість з сильфоном IV гасить високочастотні перешкоди. Вимикаюче реле ІІІ призначене для виключення дії передування. При подачі сигналу рк= 1 вихідний сигнал елементу І подається в камеру Б від’ємного зворотного зв'язку, минувши інерційну ланку (, V).
Настроювальний параметр пристрою ПФ2.1—час передування Тд — настроюється за допомогою змінного опору , в межах 0,05—10 хв.
У динамічному відношенні пристрій прямого передування є підсилювальною ланкою з великим коефіцієнтом підсилення, охопленого від’ємним зворотним зв'язком у вигляді інерційної ланки (рис. 6.43,б).
Передавальна функція
 (6.112)
(6.112)
При Ку
![]() (6.113)
(6.113)
При реалізації ПД- і ПІД-регуляторів за допомогою блоку передування ПФ2.1 використовується той факт, що задане значення хз регулюючого параметра, встановлене одного разу, звичайно не міняється в процесі регулювання, тому
![]() [при
хз
= const]. (6.114)
[при
хз
= const]. (6.114)
Таким чином, через блок передування (диференціювання) пропускається тільки сигнал, пропорційний поточному значенню хТ регулюючого параметра. У такому разі рівняння (6.111) міняє вигляд
![]() (6.115)
(6.115)
Пропорційно-інтегрально-диференціальний (ПІД) регулюючий пристрій ПРЗ.35 (рис. 6.44, 6.45) є поєднанням блоку прямого передування (елементи І, II), пропорційного (елементи IV, V, VI) і інтегрального блоків (елементи IX, X, XII). В комплект регулюючого пристрою входять також підсилювач потужності VII і три вимикаючих реле III, VIII і XI.

Рисунок 6.44 – Пропорційно-інтегрально-диференціальне регулюючий пристрій ПР3.35
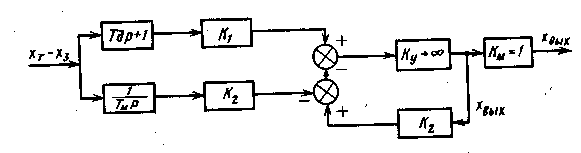
Рисунок 6.45 – Структурна схема регулюючого пристрою
ПР3.35
Сигнал хТ, пропорційний поточному значенню регулюючого параметра, проходить блок передування, що включає підсилювач — елемент порівняння І і інерційну ланку II (, Vi), і поступає на вхід суматора на опорах IV. Туди ж поступає сигнал хЗ, пропорційний заданому значенню регулюючого параметра. Одночасно сигнали хТ і хЗ поступають на вхід інтегрального блоку (суматор IX). Вихідний сигнал інтегрального блоку хІ (з виходу повторювача X) і вихідний сигнал хвих суматора VI поступають на вхід суматора на опорах V.
Знайдемо рівняння ПІД-регулюючого пристрою, використовуючи одержані в даному параграфі рівняння його окремих блоків.
На виході блоу передування утворюється сигнал
![]() (6.116)
(6.116)
Рівняння інтегрального блоку, що є інерційною ланкою (, V2), охопленого позитивним зворотним зв'язком через суматор IX, має вигляд
![]() (6.117)
(6.117)
Рівняння пропорційного блоку (суматори IV, V, VI)
![]() (6.118)
(6.118)
Підставляючи (6.116) і (6.117) в (6.118), одержуємо
![]() (6.119)
(6.119)
У цьому рівнянні [співвідношення (5.47) і (6.82)]
![]()
За допомогою змінних опорів і можна змінювати коефіцієнт підсилення К, а отже, і межу пропорційності .
При = 0, К2 = 1 межа пропорційності міняється за допомогою опору в межах 2—100 %. При =0; К2=1 межа пропорційності міняється за допомогою опору в межах 100—3000 %. Час інтеграції Ті міняється за допомогою опору (Ті=0,05–100 хв), а час передування ТД — за допомогою опору (Тд = 0,05–10 хв).
Вимикаючі реле призначені для переходу з автоматичного регулювання на ручне. При подачі командного сигналу рк=1 реле ІІІ відключає інерційну ланку II блоку передування, реле VIII відключає вихід підсилювача потужності VII від лінії виконавчого механізму, а реле XI, відключаючи інерційну ланку XII, сполучає камеру додатнього зворотного зв'язку суматора IX з лінією виконавчого механізму, готуючи її до зворотного переходу на автоматичне регулювання.
Передавальна функція щодо розузгодження
![]() (6.120)
(6.120)
При Кy
 (6.121)
(6.121)

Рисунок 6.46 – Регулюючий пристрій співвідношення з лінійними статичними характеристиками ПРЗ.33
або
![]() (6.122)
(6.122)
де
(6.123)
Регулюючий пристрій співвідношення ПРЗ.33 (рис. 6.46) з лінійними статичними характеристиками призначено для підтримки постійного співвідношення двох параметрів і складається з двох основних частин: блоку співвідношення А і регулюючого блоку Б. Перший утворюється з двох суматорів на опорах I, II і задатчика ІІІ, а другий є ПІ-регулюючим пристроєм, зібраним по схемі регулюючого пристрою ПРЗ.31.
Сигнали х1 і х2, пропорційні поточним значенням технологічних параметрів, поступають на вхід ПІ-регулюючого пристрою через суматори на опорах. Частина повітря з проточних камер суматорів скидається через змінний опір і камеру А задатчика в атмосферу, причому в камері Б підтримується постійний тиск, рівний 0,02 МПа.
Рівняння суматора І на опорах має вигляд
![]() (6.124)
(6.124)
Шляхом нескладних перетворень це співвідношення може бути представлено у вигляді
![]() (6.125)
(6.125)
або
![]() (6.126)
(6.126)
де
![]() (6.127)
(6.127)
Аналогічно для суматора II
![]() (6.128)
(6.128)
де
![]() (6.129)
(6.129)
Елемент порівняння IV регулюючого блоку знаходиться в рівновазі при х1'=х2', тобто
![]() (6.130)
(6.130)
У камері Б задатчика ІІІ підтримується тиск х0 = 0,02 МПа, рівний нижньому значенню стандартного діапазону пневматичних сигналів (0,02—0,1 МПа). Цей тиск безперервно віднімається з відповідних сигналів х1 і х2. При цьому рівняння (6.130) матиме вигляд
![]() (6.131)
(6.131)
При фіксованих значеннях і одержимо
![]() (6.132)
(6.132)
Міняючи провідності змінних опорів, можна встановлювати значення коефіцієнта співвідношення двох параметрів в межах 0,1—10.
Регулюючий блок Б вироблятиме сигнал
![]() (6.133)
(6.133)