

6.5 Елементи і вузли пристроїв безперервної дії
Пневматичні опори призначені для створення опору перебігу повітря. В схемах пневмоавтоматики вони мають таке ж призначення, як і електричні опори в електричних схемах.
Пневматичні постійні опори системи УСЕППА виконуються у вигляді капілярів, тобто каналів циліндрової форми з великим відношенням довжини до діаметру. Витрата повітря через такий капіляр при невеликих перепадах тиску визначається співвідношенням
![]() ,
(6.29)
,
(6.29)
де I, d — відповідно довжина і діаметр капіляра; р — густина повітря; n — динамічна в'язкість повітря; F — масова витрата; р — падіння тиску.
Вираз (6.29) звичайно представляють у вигляді
![]() (6.30)
(6.30)
де R — пневматичний опір, визначуваний співвідношенням
![]() (6.31)
(6.31)
або у вигляді
![]() (6.32)
(6.32)
де а= 1/R — провідність пневматичного опору
(α ≈1600 d4/l).
Постійний пневматичний опір (рис. 6.18) виконаний у вигляді капіляра 1, поміщеного в подовжньому каналі гвинта 2. Останній укручений в корпус 3, має дві приєднувальні ніжки 5. Стисле повітря під тиском р2 через одну з приєднувальних ніжок і отвір в корпусі (на малюнку не показаний) поступає до капіляра, на зовнішній поверхні якого намотана шерстяна пряжа 4. Повітря проводить через пряжу, внутрішню частину капіляра і під тиском р2 знімається з іншого боку капіляра через другу комутаційну ніжку. Опір, створюваний цим пристроєм, відповідно до виразу (6.31) визначається геометричними розмірами капіляра (зазвичай діаметр 0,3мм, довжина 20 мм).
У змінному опорі типу «конус-конус» (рис. 19) в корпусі 1 поміщена втулка 2 з конусним отвором, уздовж осі якого розташована голка 3. Остання закріплена в жорсткому центрі розділової мембрани 5 і пружиною 4 притискається до лекальної пластини 6. При обертанні настроювальної головки 8 лекальна пластина 6, що спирається на гвинти 10, тисне на голку 3, примушуючи її переміщатися уздовж осі втулки 2. В результаті переміщення голки 3 зазор між голкою і конусною втулкою змінюється, ніж і досягається настройка провідності в межах 0—1. Змінний опір приєднується до пневматичних ланцюгів через дві комутаційні ніжки, які сполучаються з двома торцевими сторонами конусної втулки через отвори в корпусі. Настроювальна головка 5 дроселя забезпечена рівномірно оцифрованою шкалою 9 з покажчиком 7. Змінний опір має індивідуальне градуювання в одиницях тих величин, які залежать від зміни його провідності (наприклад, час ізодрому, коефіцієнт підсилення і т. п.).
Рисунок 6.18 –
Постійний опір
Рисунок 6.19 –
Змінний опір
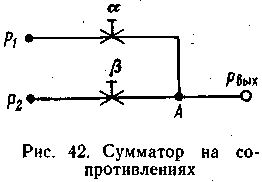
Суматор на опорах (рис. 6.20) призначений для сумувування двох пневматичних сигналів. Рівняння суматора легко може бути одержано з аналогії пневматичних ланцюгів з електричними. Для електричного ланцюга
 I=gU,
(6.33)
I=gU,
(6.33)
де
І — струм; g — електрична п
Рисунок 6.20 –
Суматор на опорах
![]() ,
,
де G — витрата повітря; а — пневматична провідність дроселя; р — перепад тиску.
Для електричного розгалуженого ланцюга відповідно до закону Кірхгофа сума струмів, направлених до вузла, рівна сумі струмів, направлених від вузла. Розглядаючи точку А як такий вузол і враховуючи, що вихідний сигнал Рвих звичайно поступає в глуху камеру (по цій лінії витрата віз духу рівна нулю), можна записати
![]() (6.34)
(6.34)
Підставивши (6.32) в (6.34), отримаємо
![]() (6.35)
(6.35)
звідки
![]() (6.36)
(6.36)
Це вираз часто записується у вигляді
![]() (6.37)
(6.37)
де
![]() (6.38)
(6.38)
Пневматичні ємності призначені для накопичення певної кількості стислого повітря і використовуються для створення інерційних ланок в пневматичних ланцюгах.
Зміна маси m повітря (пневматичний заряд) в посудині об'ємом V при зміні тиску на величину Ар і постійній температурі у визначиться із співвідношення
![]() (6.39)
(6.39)
де
![]() — коефіцієнт акумулюючої спроможності
пневмоємності; Rr—
газова постійна.
— коефіцієнт акумулюючої спроможності
пневмоємності; Rr—
газова постійна.
Пневмоємність системи УСЕППА являє собою циліндрову камеру об'ємом 50 см3 з двома приєднаними ніжками.
Механопневматичний перетворювач широко використовується в пристроях пневмоавтоматики для перетворення механічного переміщення в пневматичний сигнал (рис.6.21).
Рисунок 6.21 –
Механічний пневматичний перетворювач
„сопло заслінка” (а) і його статична
характеристика (б)
Перетворювач складається з постійного опору 1 і змінного опору, виконаного у вигляді поєднання сопла 3 і заслінки 4. Між постійним і змінних опорами є проточна камера 2. Повітря живлення під тиском р0 проходить через перетворювач і виходить через сопло 3 в атмосферу. Позначимо fi площу перетину постійного опору:
![]() (6.40)
(6.40)
Площа перетину змінного опору «сопло-заслінка» визначимо як площа поверхні циліндра заввишки h і діаметром d2
![]() (6.41)
(6.41)
Масова витрата повітря через опори при постійній температурі буде
![]() (6.42)
(6.42)
де і р — відповідно коефіцієнт витрати і густина повітря. В стані рівноваги G1 = G2.
Вважаючи p1 = p2, а також в першому наближенні α1 = α2 , одержуємо
![]() (6.43)
(6.43)
При постійних d1, p0 і d2 зміна відстані h заслінки від сопла приводить до зміни тиску в камері 2 відповідно до статичної характеристики (рис. 6.21(б), крива 1). Цей тиск є вихідною величиною перетворювача.
а)
б)
Рисунок 6.22 –
Пневматичний підсилювач з двома соплами
Як видно з рис. 6.21(6), статична характеристика перетворювача «сопло-заслінка» нелінійна. Тому в пневматичних пристроях, обмежуючи хід заслінки, використовують тільки середню лінійну ділянку характеристики. Чим менші переміщення заслінки викликають зміну тиску в робочому діапазоні, тим вище чутливість пристрою. Крім того, при малих відстанях h невеликий перекіс заслінки щодо сопла може викликати зміну тиску на виходу. Тому бажано одержати характеристику, близьку до кривої 2. Таке перетворення статичної характеристики зменшує робочий хід заслінки і видаляє її від сопла, забезпечуючи тим самим підвищення чутливості і точності пневматичного пристрою.
Для посилення пневматичних сигналів використовуються пневматичні підсилювачі з двома соплами. Вони виконуються трьохмембранними (рис. 6.21(а) на два входи) або п'ятимембранними (рис. 6.22(6) на чотири входи). В конструктивному відношенні вони є набором латунних шайб, розділених «млявими» мембранами, в результаті утворюються чотири (А, Б, В, Г) або шість (А, Б, В, Г, Д, Е) камер. Жорсткі центри всіх мембран сполучені загальним штоком. Кінці штока служать заслінками, що управляють закінченням повітря через нижні і верхні сопла. Забезпечення підстроювання підсилювача сопла виконуються регульованими положеннями. Камери, в яких розташовуються сопла, з'єднуються послідовно і утворюють проточну камеру з двома змінними опорами. Така конструкція дозволяє різко збільшити крутизну статичної характеристики підсилювача, показаний ний на рис. 6.23.
Для трьохмембранного підсилювача
![]() (6.44)
(6.44)
для п'ятимембранного підсилювача
![]() (6.45)
(6.45)
Рисунок 6.23 –
Статична х-ка підсилювача з 2-ма соплами
Рисунок 6.24 –
схема включення п’ятимембраного
підсилювача з зворотнім зв’язком
Коефіцієнт підсилення в такій конструкції Kу≈250, тобто при невеликих флюктуаціях вхідного тиску і живлення підсилювач практично працюватиме в релейному режимі.
Для забезпечення стійкої роботи підсилювача застосовують зворотні зв'язки (рис. 6.24). Три вхідні тиски поступають відповідно в камери Д, Г і В, а камера б використовується як камера від’ємного зворотного зв'язку. Позначивши площу великої мембрани F, а площу малої мембрани f, одержимо умову рівноваги схеми:
![]() (6.46)
(6.46)
звідки
![]() (6.47)
(6.47)
Таким чином, дана схема включення здійснює операцію алгебри, підсумовування трьох пневматичних сигналів. Такий пристрій часто називають мембранним суматором.
Повторювач (Рис. 6.25(а), слідкуюча камера) з постійним опором звичайно використовується для повторення (відлежування) зміни вхідного сигналу.
![]() (6.47)
(6.47)
Він складається з вхідної б і вихідної А камер, розділених гнучкою мембраною. Жорсткий центр цієї мембрани служить заслінкою сопла.
Повторювач діє за принципом компенсації сил. Вхідний пневматичний сигнал поступає в камеру б і розвиває на мембрані зусилля, направлене вниз. В камеру А через постійний опір, в комплекті з яким працює повторювач, безперервно подається повітря по лінії живлення. Частина повітря з камери Л через зазор між заслінкою і соплом скидається в. атмосферу. В камері А встановлюється тиск, проміжний по значенню між тиском ржив і атмосферним. Це тиск, який є вихідним сигналом елементу, розвиває на мембрані зусилля, направлене вгору. Обидва протилежно направлені на мембрану зусилля безперервно порівнюються. При порушенні рівноваги, наприклад при збільшенні рвх мембрана прикриє сопло і зменшить витрату повітря в атмосферу. Тиск в камері А (рвих) збільшиться, і рівновага відновиться. Завдяки високій чутливості мембрани повторювач володіє високою точністю повторення сигналу, проте потужність цього елементу дуже обмежена.
Рисунок 6.25 – Повторювач
На рис. 6.25(6) показана схема «повторювача із зсувом». Конструктивна відмінність цієї схеми від схеми на рис. 6.25(а), полягає в додаванні двох пружин і гвинта. В результаті ' вихідний сигнал такого пристрою може бути більше або менше вхідного сигналу на величину зсуву Ар, визначуваного положенням гвинта, тобто
![]() (6.48)
(6.48)
При вивертанні гвинта дія верхньої пружини зменшується, а нижня пружина створює додаткове зусилля на мембрану, внаслідок чого рівновага наступає при Рвих, меншому, ніж рвх тобто Рвих = рвх –Δр (від’ємний зсув).
При вивертанні гвинта створюється натягнення верхньої пружини, внаслідок чого рівновага поступає при рвих більшому, ніж рвх, тобто (додатній зсув) (рис. 6.26) призначений для повторення вхідного пневматичного сигналу і посилення його по потужності.
Вхідний тиск поступає в камеру Д підсилювача. Тиск живлення проходить в камеру А і через постійний опір в камеру В. При відсутності вхідного сигналу повітря живлення проходить з камери В через сопло 4 в камеру Г і далі через камеру Е і сопло 1 в атмосферу. При підвищенні вхідного тиску мембрана 2 закриває сопло 1, а мембрана 3 закриває сопло 4. Тиск в камері
Рисунок 6.26 –
Усилитель мощности
Рисунок 6.27 –
Задатчик:
а-конструкция;
б-схема
включения


В підвищується, клапан 5 відкривається, і тиск в камері Б І на виході збільшується. Одночасно під дією зворотного зв'язку зростає тиск в камерах Г і Е. Сопла І і 3 привідкриваються, і повітря живлення знову проходить через камери В, Г і Е в атмосферу. Тиск в камері В зменшується і клапан 5 закривається. На виході встановлюється тиск рвих, рівний вихідному тиску рвх. При зменшенні вхідного тиску мембрана 2 відкриває сопло 1, а мембрана 3 відкриває сопло 4. Частина повітря з вихідної камери Б проходить через сопло 1 в атмосферу, і тиск на виході Знижується. Використовуючи додаткове джерело живлення і Керуючий клапан 5 великого прохідного перерізу, підсилювач забезпечує посилення вихідного сигналу по потужності (витраті повітря).
Задаючий пристрій (рис. 6.27) з постійним опором призначений для підтримки постійного (заданого) тиску стислого повітря в глухих камерах регулюючих пристроїв. Він складається з кулькового клапана, утвореного кулькою 4 і сідлом 3, пружини 5, гвинта 7, тарілки 6, вхідний і вихідний приєднувальних ніжок 2 і 1. При подачі через одну з ніжок повітря живлення в камеру Л в ній встановлюється тиск, відповідний стисненню пружини. Надлишок стислого повітря через кульковий клапан і камеру б скидається в атмосферу. Змінюючи ступінь стиснення пружини за допомогою гвинта, можна набути різні значення тиску повітря на виході задаючого пристрою.
Інерційна ланка утворюється при сумісному включенні змінного опору і пневмоємності (рис. 6.28). Зміна вхідного тиску викликає приріст витрати повітря через опір відповідно до виразу (для малих витрат повітря)
ΔF =α(pвх – рвих) (6.49)
У свою чергу, зміна витрати викличе приріст маси газу в пневмоємності на величину Δm. Зміну масової витрати можна представити у вигляді
![]() (6.50)
(6.50)

Рисунок 6.28 – Інерційна ланка
Підставивши в співвідношення (6.50) вираз (6.39) для пневматичного заряду, одержимо
![]() (6.51)
(6.51)
З врахуванням (6.49)
![]() (6.52)
(6.52)
звідки
![]() (6.53)
(6.53)
де T=V/aRrΘ — постійна часу ланки, яку можна міняти зміною провідності змінного опору.
Інтегруюча ланка утворюється при сумісному включенні п'ятимембранного суматора І і інерційної ланки II (рис. 6.29,а). В структурному відношенні це відповідає інерційній ланці, охопленій позитивним зворотним зв'язком (рис. 6.29,б).
Вихідний сигнал суматора І визначається співвідношенням
рвихІ = рвих –р1+р2. (6.54)

Рисунок 6.29 – Інтегруюча ланка
Він же є вхідним сигналом інерційної ланки, для якої справедливе співвідношення
![]() (6.55)
(6.55)
Підставивши (6.27) в (6.28), одержимо
![]() (6.56)
(6.56)
звідки
![]() (6.57)
(6.57)
Цей вираз в інтегральній формі матиме вигляд
![]() (6.58)
(6.58)
Величину Т — постійну часу — можна міняти шляхом зміни провідності змінного опору інерційної ланки. Вважаючи Хвх = р2 — p1, можна легко визначити передавальну функцію ланки виходячи з схеми, показаної на рис. 6.29,б:
![]() (6.59)
(6.59)