

6.3 Регулятори прямої дії
Як вже вказувалося вище, регулятори прямої дії конструктивно поєднують в собі чутливий елемент, елемент порівняння і регулюючий орган. Для переміщення регулюючого органу не використовуються сторонні джерела енергії. Ці регулятори призначені для стабілізації якогось певного параметра. Їх перевагами є простота конструкції, надійність і невисока вартість.
Регулятор температури типа РТПД (рис. 6.16) призначений для стабілізації температури води, масла і інших неагресивних рідин і газів. Регулятор побудований на базі манометричного термометра, основними елементами якого є термобалон 1, капіляр 2 і сильфон 4, поміщений в кожусі 3. Приблизно 2/3 об'єму термобалону і решти термометричної системи заповнені робочою низькозакипаючою рідиною. Верхню частину термобалона займає насичена пара цієї рідини, тиск якого залежить від температури. При зануренні термобалона у вимірюване середовище в термосистемі встановлюється тиск насиченої пари, пропорційний температурі вимірюваного середовища. Сильфон 4 виконує роль елементу порівняння. Він порівнює дію тиску рідини, пропорційного поточній температурі, з дією пружини 5, яка визначає задане значення температури. Якщо поточне значення температури перевищує задане, сильфон 4 стискається і переміщає шток 6 вниз, викликаючи зменшення прохідного перетини регулюючого органу 8.
При цьому зменшується кількість нагріваючого продукту, що поступає в об'єкт регулювання.
За законом регулювання цей регулятор відноситься до П-регуляторів. Його рівняння.
![]() (6.28)
(6.28)
де хвх — зміна температури; xВИХ — переміщення регулюючого органу.
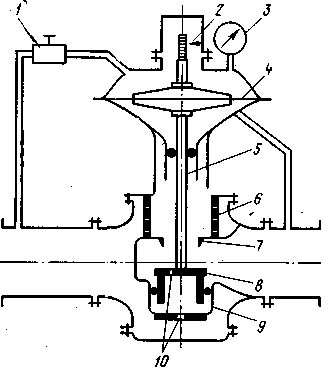
Рисунок 6.17 – Принципова схема регулятора тиску прямої дії типа РД
Коефіцієнт підсилення К в цьому регуляторі не міняється. На певне задане значення температури регулятор настроюється зміною попереднього натягнення пружини за допомогою гайки 7.
Регулятори РТПД випускаються з різними діапазонами регульованою, температури (40—50, 45—55 і т.д. до 75— 85 °С). Величина ходу регулюючого органу 10 або 20 мм. Відповідно коефіцієнт підсилення регуляторів рівний 1 або 2 мм/°С.
Регулятор тиску прямої дії типу РД (рис. 6.17) призначений для стабілізації тиску газу. Газ, що відбирається з боку входу регулятора, поступає через редуктор 1 в порожнину над мембраною 4, а газ, що відбирається з боку виходу регулятора, – в порожнину під мембраною. Остання за допомогою штока 5 пов'язана з регулюючим органом 8, який переміщається уздовж спрямовуючого циліндра 9. Стакан 6 з отворами служить для попереднього редукування газу. Задане значення тиску на виході регулятора встановлюється редуктором 1 по манометру 3. При збільшенні тиску газу після регулятора тиск під мембраною також збільшиться і стане більшим заданого. Мембрана прогнеться вгору і перемістить регулюючий орган 8 щодо його сідла 7. Переміщення продовжуватиметься, до тих пір, поки тиск на виході регулятора, а отже, і під мембраною не буде рівно заданому. Таким чином, за законом регулювання регулятор РД відноситься до І-регуляторам. Положення регулюючого органу контролюється за допомогою покажчика 2. Затвор регулюючого органу розвантажується від дії регулюючого середовища через отвори 10. Діапазон настройки регулюючого тиску на виході складає 0,25—2,5 МПа.