

3.6 Диференціююча ланка
Диференціюючою називають таку ланку, в якій вихідна величина пропорційна похідній від вхідної величини
![]() . (3.48)
. (3.48)
Перетворимо рівняння (3.48) за Лапласом
![]() тоді
тоді
![]()
Знаходимо перехідну функцію ланки, перехідна характеристика якої показана на рис. 3.10
![]() .
.
Амплітудно-фазова функція
![]() .
.
АФХ співпадає з уявною віссю (рис. 3.11).
АЧХ:
![]()
ФЧХ:
![]()
ЛАЧХ:
![]()
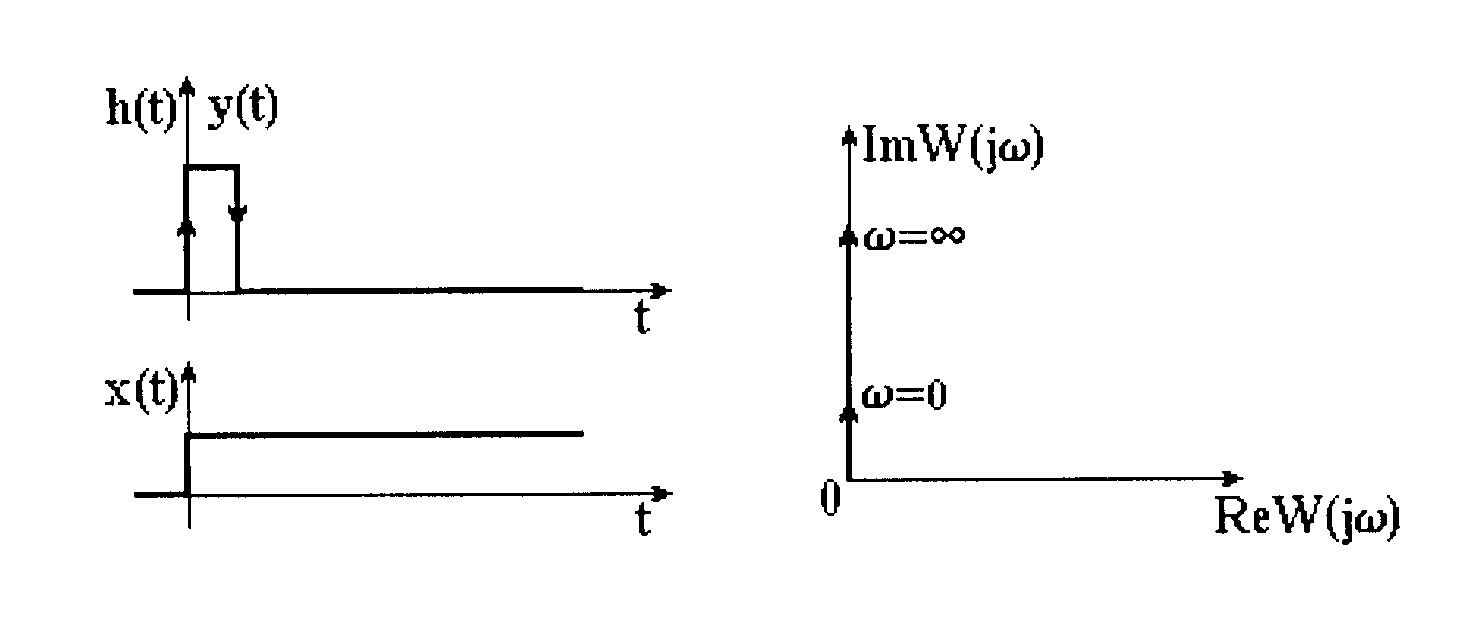
Рисунок 3.10 – Перехідна характеристика диференціюючої ланки |
Рисунок 3.11 – АФХ диференціюючої ланки |
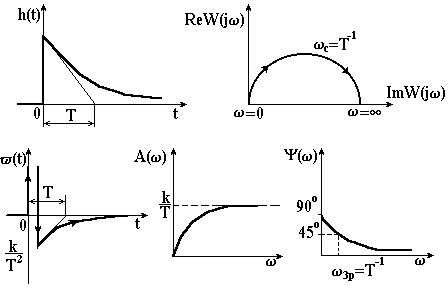
Реальна диференціююча ланка являє собою послідовне з’єднання ідеальної диференціюючої ланки та інерційної ланки І-го порядку. Вона має таке диференціальне рівняння:
Рисунок 3.12 – АЧХ (а), ФЧХ (б), ЛАЧХ (в) диференціюючої ланки |

![]() (3.49)
(3.49)
і передавальну функцію
![]() . (3.50)
. (3.50)
Таку ланку можна зобразити у вигляді послідовного або паралельного з’єднання безінерційної і інерційної ланок (рис. 3.13).
Характеристики реальної диференціюючої ланки приведені на рисунку 3.14.
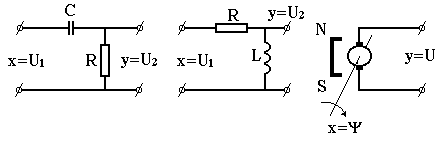
Приклади реальних диференціюючих ланок приведені на рисунку 3.15.
Диференціюючі ланки в статичному режимі не передають сигналу на вихід, вони добре пропускають високочастотні сигнали і погано-низькочастотні. Вони вносять додатковий фазовий зсув.
Рисунок 3.13 – Реальні диференціюючі ланки |
Рисунок 3.14 – Характеристики реальної диференціюючої ланки |
Рисунок 3.15 – Приклади диференціюючих ланок |

3.7 Інерційні ланки другого порядку
Диференціальне рівняння ланок ІІ-го порядку має вигляд
![]() . (3.51)
. (3.51)
Йому відповідає рівняння динаміки в операторній формі
![]() (3.52)
(3.52)
і передавальна функція
![]() . (3.53)
. (3.53)
Характеристичне
рівняння
![]() має два корені
має два корені
 . (3.54)
. (3.54)
Характер перехідного процесу залежить від типу коренів, які можуть бути дійсними, комплексними і уявними.
Рисунок 3.16 – Перехідна характеристика аперіодичної ланки ІІ-го порядку |

І. Якщо
![]() ,
то обидва корені дійсні, тобто
,
то обидва корені дійсні, тобто
![]()
де
![]() і
і
![]() – умовні постійні часу.
– умовні постійні часу.
Перехідна характеристика такої ланки є монотонною. Вона близька до інерційної ланки І-го порядку, тому її називають – аперіодична ланка ІІ-го порядку.
При передавальну функцію (3.53) можна представити в таких еквівалентних формах:
![]() , (3.55)
, (3.55)
![]() , (3.56)
, (3.56)
яким відповідають алгоритмічні схеми, приведені на рисунку 3.17, б, г.
ІІ. Якщо
![]() ,
то корені характеристичного рівняння
комплексні і спряжені
,
то корені характеристичного рівняння
комплексні і спряжені
 (3.57)
(3.57)
Перехідна характеристика в цьому випадку носить коливальний характер (рис. 3.18). Тобто, маємо коливальну ланку.
ІІІ.
Якщо
![]() ,
то обидва корені уявні, і перехідна
характеристика являє собою незатухаючу
синусоїду. Інерційну ланку ІІ-го порядку
з
називають ідеальною коливальною або
консервативною.
,
то обидва корені уявні, і перехідна
характеристика являє собою незатухаючу
синусоїду. Інерційну ланку ІІ-го порядку
з
називають ідеальною коливальною або
консервативною.
Поряд із загальними властивостями всі ланки реально відрізняються одна від одної. Розглянемо окремо характеристики інерційних ланок ІІ-го порядку.
Перехідна функція аперіодичної ланки ІІ-го порядку може бути одержана додаванням загального рішення
![]() (3.58)
(3.58)
Рисунок 3.17 – Алгоритмічні схеми інерційних ланок ІІ-го порядку |

і
рішення, яке відповідає примусовій
складовій при
![]() тоді перехідна функція має такий вигляд:
тоді перехідна функція має такий вигляд:
![]() . (3.59)
. (3.59)
Після
підстановки початкових умов
![]() і
і
![]() у вираз (3.59), маємо
у вираз (3.59), маємо
![]() (3.60)
(3.60)
|
|
Рисунок 3.18 – Перехідна характеристика коливальної ланки |
Рисунок 3.19 – Перехідна характеристика консервативної ланки |


тоді перехідна функція має такий вигляд:
 . (3.61)
. (3.61)
Передавальна функція
![]() . (3.62)
. (3.62)
Сталі
часу
![]() і
і
![]() можна визначити на підставі
графікоекспериментальної перехідної
характеристики.
можна визначити на підставі
графікоекспериментальної перехідної
характеристики.
Характеристики аперіодичної ланки ІІ-го порядку показані на рис 3.21.
З частотних характеристик даної ланки випливає, що вона добре пропускає сигнали низької частоти і погано пропускає сигнали високої частоти.
Коливальна ланка – це така ланка, в якій при стрибкоподібній зміні вхідної величини вихідна величина прямує до нового встановленого значення, здійснюючи навколо нього затухаючі коливання.
Для більш детального вивчення диференціальне рівняння ланки записують у такому вигляді:
![]() , (3.63)
, (3.63)
Рисунок 3.20 – Перехідна характеристика аперіодичної ланки ІІ-го порядку |

де
![]() – постійна часу, яка характеризує
інерційність ланки;
– постійна часу, яка характеризує
інерційність ланки;
![]() де
де
![]() – відносний коефіцієнт затухання; він
характеризує коливальність ланки і
змінюється від 0 до 1.
– відносний коефіцієнт затухання; він
характеризує коливальність ланки і
змінюється від 0 до 1.
Перетворивши рівняння (3.63) за Лапласом, отримаємо передавальну функцію
![]() , (3.64)
, (3.64)
![]() . (3.65)
. (3.65)
Ця передавальна функція вигідніша, бо тут фігурує одна постійна часу Т. Прирівнюючи до нуля знаменник (3.65), одержимо характеристичне рівняння
Рисунок 3.21 – Характеристики аперіодичної ланки ІІ-го порядку |

![]() . (3.66)
. (3.66)
Розв’язуючи це рівняння відносно р, будемо мати
![]() , (3.67)
, (3.67)
де
![]() – коефіцієнт затухання;
– коефіцієнт затухання;
![]() – кутова частота затухання коливань,
рад/с.
– кутова частота затухання коливань,
рад/с.
Підставляючи
в загальний розв’язок диференціального
рівняння (3.58) значення комплексних
коренів (3.67) і додавши до нього часткове
рішення
![]() ,
отримаємо перехідну функцію коливальної
ланки
,
отримаємо перехідну функцію коливальної
ланки
![]() , (3.68)
, (3.68)
За допомогою формули Ейлера
![]() (3.69)
(3.69)
функцію (3.68) можна перетворити до такого вигляду:
![]() . (3.70)
. (3.70)
Використовуючи
початкові умови
і
![]() ,
знайдемо
,
знайдемо
![]() , (3.71)
, (3.71)
![]() . (3.72)
. (3.72)
Остаточно перехідна функція може бути записана в наступному вигляді:
![]() . (3.73)
. (3.73)
Вільна складова перехідної функції (рис. 3.22, а) являє собою синусоїду, амплітуда якої зменшується за законом експоненти.
Період затухаючих коливань дорівнює
![]() . (3.74)
. (3.74)
Чим
менша постійна часу Т і чим більший
коефіцієнт демпфування ,
тим швидше затухають коливання. Якщо
коефіцієнт демпфування
![]() ,
що відповідає
,
що відповідає
![]() ,
то на виході ланки після подачі одиничного
ступінчатого впливу виникають незатухаючі
коливання з частотою
,
то на виході ланки після подачі одиничного
ступінчатого впливу виникають незатухаючі
коливання з частотою
![]() .
.
Швидкість затухання коливального перехідного процесу оцінюють степенем затухання
![]() . (3.75)
. (3.75)
Рисунок 3.22 – Характеристики коливальної ланки ІІ-го порядку |

Чим
ближче до одиниці, тим швидше затухають
коливання. Степінь затухання залежить
від співвідношення дійсної і уявної
частин комплексного кореня. Дійсно,
якщо у вираз (3.73) підставити два значення
t, які відрізняються на період затухання
коливань
![]() ,
то можна отримати
,
то можна отримати
![]() . (3.76)
. (3.76)
Відношення
![]() називають ступенем коливальності.
називають ступенем коливальності.
Використовуючи вираз (3.67), можна з’ясувати зв’язок між ступенем коливальності і коефіцієнтом демпфування
![]() . (3.77)
. (3.77)
Від коефіцієнта залежить максимальне значення перехідної функції.
Продиференціювавши (3.70) за t і прирівнявши похідну до нуля, одержимо
![]() , (3.78)
, (3.78)
![]() . (3.79)
. (3.79)
АФХ коливальної ланки (рис. 3.22, е) описується функцією
![]() . (3.80)
. (3.80)