

3. Описание программы лабораторной работы
Выполнение лабораторной работы производится в системе MATLAB версии 6.5. Для этого было разработано специальное приложение, позволяющее производить исследования корреляционно-экстремальных поисковых алгоритмов при изменении их параметров на различных видеопоследовательностях. Внешний вид приложения представлен на рис. 12.
4. Порядок выполнения работы
1. Знакомство с классическим и разностным корреляционными методами измерения координат объекта на изображении.
1.1. Выберите и загрузите первую из предложенных видеопоследовательностей (кнопка 4 и поле 9). Для этого следует написать имя каталога, в котором находятся файлы этой последовательности, и нажать кнопку “Загрузка последовательности”. Можно также открыть этот каталог с помощью кнопки в правой части поля 9, открыть первый файл записанной в нем последовательности кадров и затем нажать кнопку “Загрузка последовательности”.
1.2. Выберите в первом кадре последовательности светлый эталонный объект (рис. 13). Для этого следует щелкнуть на кнопке “Выбор Эталона”, подвести появившееся перекрестье в точку предполагаемого левого верхнего угла области, включающей нужный объект, и, нажав левую кнопку мыши, выделить эту область. После отпускания кнопки мыши изображение этой области кадра принимается в качестве исходного эталонного изображения
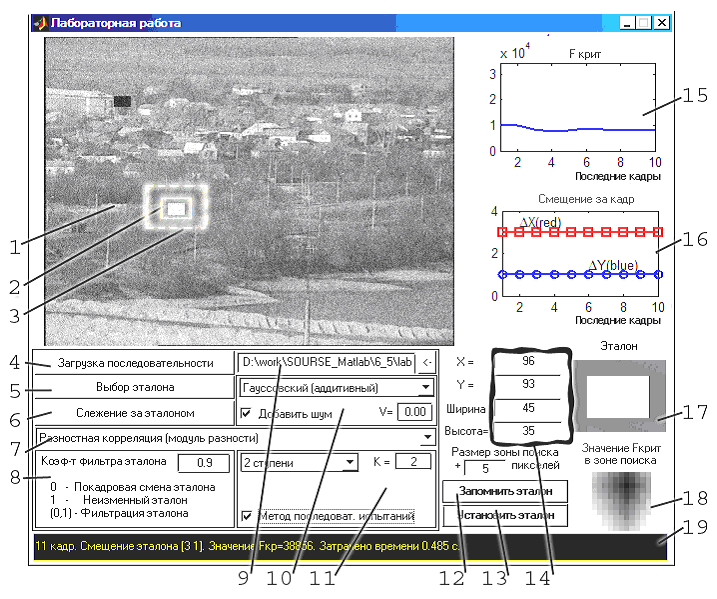
Рис. 12. Общий вид приложения
1 – очередной кадр видеопоследовательности;
2 – зона поиска объекта;
3 – найденный участок кадра, соответствующий текущему эталону;
4 – кнопка загрузки видеопоследовательности;
5 – кнопка выбора эталона;
6 – кнопка запуска процесса слежения за объектом;
7 – поле выбора типа критериальной функции;
8 – панель управления межкадровой фильтрацией;
9 – адрес текущей видеопоследовательности;
10 – панель управления зашумлением;
11 – панель управления методом последовательных испытаний;
12 – кнопка запоминания эталона;
13 – кнопка загрузки предварительно запомненного эталона;
14 – параметры эталонного изображения;
15 – значение критериальной функции за последние 10 кадров;
16 – координаты объекта, найденные в последних 10 кадрах;
17 – текущее эталонное изображение;
18 – двумерное изображение критериальной функции в текущем кадре;
19 – строка состояния и подсказок.
объекта и для контроля выводится в нижней части окна программы. Рекомендуется выбирать размеры эталонов близкими или равными размерам объекта. В случае необходимости процедуру выбора начального эталона можно повторить или скорректировать размеры эталона с помощью панели 14. Чтобы в дальнейшем при изменении параметров алгоритма начать моделирование с тем же исходным эталоном, его следует запомнить с помощью кнопки 12.
1.3. Выберите одну из четырёх предложенных корреляционных функций (поле 7).
1.4. Исходный размер зоны поиска объекта в текущем кадре выберите равным трети максимальных размеров эталона.
1.5. Запустите процесс слежения за объектом (кнопка 6). По окончании видеопоследовательности зафиксируйте результаты работы алгоритма (отметьте, был ли срыв слежения, и если был, то в каком кадре, наблюдалось ли «сползание» эталона, оцените время обработки одного кадра и максимальные смещения объекта за кадр). По окончании последовательности выводятся графики Fкр ( nкадра ), x ( nкадра ), y ( nкадра ).

Рис. 13. Кадр первой видеопоследовательности:
1 – темный объект.
2 – серый объект.
3 – светлый объект.
Примечание. Остановить процесс слежения можно, нажав на кнопку закрытия окна в его правом верхнем углу. В открывшемся окне запроса (рис. 14) следует выбрать кнопку «Прервать слежение». Нажатие на кнопку «Выйти» приводит к закрытию окна лабораторной работы.
Рис. 14. Окно запроса
1.6. Определите минимально возможные размеры зоны поиска для данного объекта. Для этого последовательно уменьшая размеры зоны поиска объекта, повторяйте пп. 1.1 – 1.5 до тех пор, пока максимальная ошибка в определении координат объекта не станет больше величины, найденной при исходной зоне поиска объекта. При этом следует не выбирать заново исходный эталон, а устанавливать ранее сохраненный.
1.7. Повторите пп. 1.1 – 1.5 для остальных корреляционных функций при том же эталоне и минимальных размерах зоны поиска объекта. После этого сделайте выводы о качестве оценивания координат с помощью различных критериальных функций.
1.8. Загрузите заново ту же самую последовательность кадров.
1.9. Повторите пп. 1.3 – 1.7 для серого и тёмного объектов.
2. Знакомство с поисковым алгоритмом с межкадровой фильтрацией эталонного изображения объекта.
2.1. Выберите и загрузите вторую видеопоследовательность.
2.2. Выберите разностную корреляционную функцию (модуль разности).
2.3. Выберите в первом кадре последовательности эталонный объект (любой автомобиль) и запомните его.
2.4. Установите режим постоянного эталона (панель 8).
2.5. Выберите размер зоны поиска объекта, равный половине максимальных размеров эталона.
2.6. Запустите процесс слежения за эталоном. По окончании видеопоследовательности зафиксируйте результаты работы алгоритма.
2.7. Загрузите заново последовательность, установите сохраненный ранее эталон и повторите п. 2.6 для режимов постоянной смены эталона и межкадровой фильтрации (коэффициент фильтрации задайте равным 0.5, 0.7, 0.9, 0.95).
2.8. Повторите пп. 2.3 – 2.7 для нескольких различных эталонов.
2.9. Сделайте выводы.
2.10. Перегрузите исходную последовательность, выберите и запомните эталон, задайте один из видов шума и его интенсивность и запустите процесс слежения. Обратите внимание на характер изменения и значение критериальной функции. Постарайтесь подобрать такие значения дисперсии шума, чтобы обнаружение объекта стало нестабильным. Зафиксируйте максимальное значение дисперсии шума, при котором не происходит срыва слежения.
2.11. Сделайте выводы.
3. Исследование метода последовательных испытаний.
3.1. Выберите и загрузите вторую видеопоследовательность.
3.2. Выберите разностную корреляционную функцию (модуль разности) и режим межкадровой фильтрации эталона с коэффициентом фильтрации, равным 0.9.
3.3. Выберите в первом кадре последовательности эталонный объект (любой автомобиль) и запомните его.
3.4. Запустите процесс слежения за эталоном. По окончании видеопоследовательности зафиксируйте результаты работы алгоритма. Обратите внимание на стабильность работы алгоритма, процент отсеянных точек и среднее время обработки одного кадра.
3.5. Перегрузите последовательность, загрузите эталон и повторите п. 3.4 для разного количества ступеней и значения коэффициента k. Попробуйте подобрать такие значения, чтобы стабильность работы алгоритма оставалась на прежнем уровне, а процент отсева был максимально высоким.
3.6. Сделайте выводы.