

Методические указания к выполнению контрольной работы № I
Контрольная работа № 1 состоит из двух задач.
Первая задача посвящена структурному и кинематическому исследованию механизма. Во второй задаче производится расчет и построение геометрической картины нормального эвольвентного зацепления двух зубчатых колес.
Прежде чем приступить к выполнению контрольной работы, студент должен предварительно изучить следующие основные вопросы:
Структурный анализ механизмов.
Исследование и проектирование плоских рычажно-шарнирных механизмов.
Кинематический анализ механизмов. Задачи и методы кинематического анализа. Планы положений механизма. Определение скоростей и ускорений методом планов. Кинематические диаграммы.
4. Зубчатые передачи. Виды зубчатых механизмов. Передаточное отношение. Основы теории зацепления. Элементы и параметры стандартного эвольвентного зацепления.
Задача №.1 структурное и кинематическое исследование механизма
В качестве примера для решения задачи № 1 контрольной работы № 1 проведем исследование схемы механизма, представленной на рис. 1, у которого ведущее звено 1 (кривошип ОА) вращается со скоростью n1=210 об/мин по часовой стрелке; размеры механизма: lОА =0,04 м; lАВ =0,09 м; lВС =0,07 м; lВЕ =0,025 м; l0С =0,105 м; lOD =0,05 м; моменты инерции звеньев относительно осей проходящих через центр тяжести.
угол
положения ведущего звена ф=135°.
![]()
В теории механизмов и машин действительные размеры принято выражать в метрах, а их масштабные значения — в миллиметрах.
По исходным данным вычерчиваем схему механизма в произвольно выбранном, но удобном для построения масштабе kl м/мм, где kl— масштабный коэффициент, который показывает, сколько метров действительной длины содержится в одном миллиметре отрезка на чертеже.
Действительная длина ведущего звена l0А =0,04 м. На чертеже изобразим его отрезком ОА = 40 мм. Тогда масштабный коэффициент будет равен
В этом масштабе вычерчиваем схему механизма.
Чертежные размеры в мм остальных звеньев в выбранном масштабе определятся соответственно:
Структурное и кинематическое исследование механизма
I. Структурное исследование механизма
Согласно принципу образования механизмов, сформулированному впервые русским ученым Л. В. Ассуром, любой механизм может быть составлен последовательным присоединением к ведущему звену (ведущим звеньям) групп звеньев с нулевой степенью подвижности.
Определим количество ведущих звеньев нашего механизма. Как известно, оно определяется степенью подвижности W механизма, которая может быть вычислена по формуле академика П. Л. Чебышева
W=3n-2p5-p4,
где n— число подвижных звеньев; p5 .— число низших кинематических пар; р4 — число высших кинематических пар.
Исследуемый механизм имеет: число подвижных звеньев n=3 (на схеме механизма все подвижные звенья пронумерованы от 1 до 3, а неподвижное звено-стойка обозначено через 0); число низших кинематических пар p5=4. Высших кинематических пар р4 в данном механизме нет.
Следовательно, степень подвижности его равна:
W=3*3-2*4=1.
Это означает, что в рассматриваемом механизме достаточно задать закон движения только одному звену (в данном случае звену l, которое является ведущим), чтобы закон движения всех остальных звеньев был бы вполне определенным.
Произведем разложение механизма на группы Ассура. Правильно выполнить эту операцию очень важно, так как с этим непосредственно связано все дальнейшее исследование механизма.
Разложение механизма на группы Ассура обычно осуществляется методом попыток и его следует начинать с последней, наиболее отдаленной от ведущего звена и наиболее простой группы. Простейшая группа Ассура представляет собой сочетание двух звеньев и трех кинематических пар.
Для нашего механизма такой группой является комбинация звеньев 2 и 3 и трех вращательных кинематических пар: в точках А, В к С.
Действительно, оставшаяся часть механизма — ведущее звено ОА — имеет степень подвижности W=1. Группа 2—3 является труппой Ассура первого вида, так как все три кинематические пары являются вращательными.
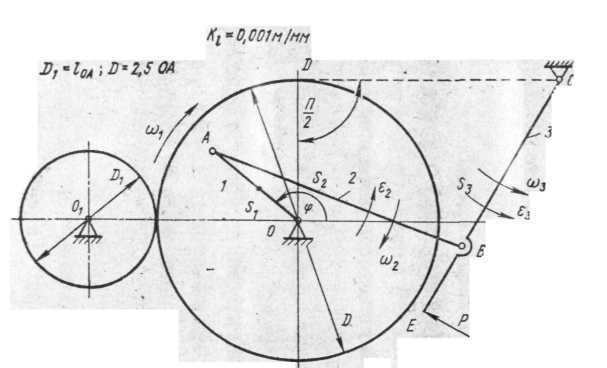
Рис.1 Схема механизма

Рис.2 Разложение механизма на группы Ассура