

«Дифференциальные уравнения механических колебаний. Векторное и комплексное изображение гармонических колебаний».
Содержание
Введение
Дифференциальное уравнение механических колебаний
Свободные колебания. Векторное и комплексное изображение гармонических колебаний
2.1 Запись гармонических колебаний в комплексной форме
2.2 Запись гармонических колебаний в векторной форме
Вынужденные колебания. Резонанс
3.1 Вынужденные колебания
3.2 Резонанс
Заключение
Решение задачи
Список литературы
Введение
Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. Колебательные процессы широко распространены в природе и технике, например, качания маятника часов, переменный электрический ток и т.д. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напряжение и ток в цепи. Физическая природа колебаний может быть разной, поэтому различают колебания механические, электромагнитные и другие. Однако различные колебательные процессы описываются одинаковыми характеристиками и одинаковыми уравнениями. Отсюда следует целесообразность единого подхода к изучению колебаний различной физической природы. Например, единый подход к изучению механических и электромагнитных колебаний применялся английским физиком Д. У. Релеем (1842-1919), А.Г. Столетовым, русским инженером-экспериментатором П.Н. Лебедевым (1866-1912). Большой вклад в развитие теории колебаний внесли: Л.И. Мандельштам (1879-1944) и его ученики.
Дифференциальное уравнение механических колебаний
Механическими колебаниями называют движения тел, повторяющиеся точно (или приблизительно) через одинаковые промежутки времени. Закон движения тела, совершающего колебания, задается с помощью некоторой периодической функции времени x = f(t). Графическое изображение этой функции дает наглядное представление о протекании колебательного процесса во времени. Примерами простых колебательных систем могут служить груз на пружине или математический маятник (рис. 1).


Рис.1
Механические колебания, как и колебательные процессы любой другой физической природы, могут быть свободными и вынужденными.
В этом разделе и следующих мы рассмотрим одну задачу прикладной механики, исследовав и разрешив ее с помощью дифференциальных уравнений.
Пусть груз массы Q покоится на упругой рессоре (рис. 2).
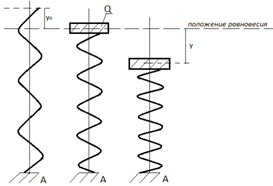
Рис. 2
Отклонение груза от положения равновесия обозначим через y. Отклонение вниз будем считать положительным, вверх – отрицательным. В положение равновесия вес уравновешивается упругостью пружины. Предположим, что сила, стремящаяся вернуть груз в положение равновесия, - так называемая восстанавливающая сила – пропорциональна отклонению, т. е. равна – ky, где k – некоторая постоянная для данной рессоры величина (так называемая «жесткость рессоры»).
Предположим,
что движению груза Q
препятствует
сила сопротивления, направленная в
сторону, противоположную направлению
движения, и пропорциональная скорости
движения груза относительно нижней
точки рессоры, т. е. сила –λν
= -λ ,
где λ
= const≥
0
(амортизатор). Напишем дифференциальное
уравнение движения груза на рессоре.
На основании второго закона Ньютона
будем иметь:
,
где λ
= const≥
0
(амортизатор). Напишем дифференциальное
уравнение движения груза на рессоре.
На основании второго закона Ньютона
будем иметь:
 (1)
(1)
(здесь k и λ – положительные числа). Мы получили линейное однородное дифференциальное уравнение второго порядка с постоянными коэффициентами.
Это уравнение можно переписать так:
 (1
(1 )
)
где обозначено ρ = λ/Q,q = k/Q.
Предположим,
далее, что нижняя точка рессоры совершает
вертикальные движения по закону z
=
 (t).
Это, например, будет иметь место, если
нижний конец рессоры прикреплен к катку,
который вместе с рессорой и грузом
движется по неровности (рис. 3).
(t).
Это, например, будет иметь место, если
нижний конец рессоры прикреплен к катку,
который вместе с рессорой и грузом
движется по неровности (рис. 3).
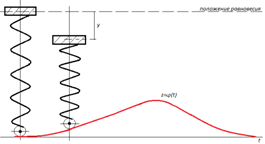
Рис. 3
В
этом случае восстанавливающая сила
будет равна не ky,
а
ky,
а
 , сила сопротивления будет
, сила сопротивления будет
 ,
и вместо уравнения (1) мы получим уравнение:
,
и вместо уравнения (1) мы получим уравнение:
 (2)
(2)
Или
 (2
)
(2
)
где обозначено
Мы получили неоднородное дифференциальное уравнение второго порядка.
Уравнение
( )
называют уравнением свободных
колебаний, уравнение (
)
называют уравнением свободных
колебаний, уравнение ( )
– уравнением вынужденных
колебаний.
)
– уравнением вынужденных
колебаний.
Свободные колебания. Векторное и комплексное
изображение гармонических колебаний
Свободные колебания совершаются под действием внутренних сил системы, после того, как система была выведена из состояния равновесия. Колебания груза на пружине или колебания маятника являются свободными колебаниями (рис.4 и 5)
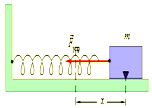
Рис.4. Колебания груза на пружине. Трения нет.
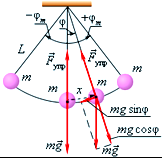
Рис.5 Математический маятник. φ – угловое отклонение маятника от положения равновесия, x = lφ – смещение маятника по дуге.
Простейшим типом колебаний являются гармонические колебания - колебания, при которых колеблющаяся величина изменятся со временем по закону синуса (косинуса). Рассмотрение гармонических колебаний важно по двум причинам :
Колебания встречающиеся в природе и технике, часто имеют характер, близкий к гармоническому;
Различные периодические процессы (процессы, повторяющиеся через равные промежутки времени) можно представить как наложение гармонических колебаний.
Рассмотрим сначала уравнение свободных колебаний
 (1)
(1)
Напишем соответствующее характеристическое уравнение

и найдем его корни:

Пусть
 Тогда корни
Тогда корни
 – действительные отрицательные числа.
Общее решение выражается через
показательные функции:
– действительные отрицательные числа.
Общее решение выражается через
показательные функции:
 (2)
(2)
Из
этой формулы следует, что отклонение
 при любых начальных условиях асимптотически
стремится к нулю, если
при любых начальных условиях асимптотически
стремится к нулю, если
 В данном случае колебаний не будет, так
как силы сопротивления велики по
сравнению с коэффициентом жесткости
рессоры
В данном случае колебаний не будет, так
как силы сопротивления велики по
сравнению с коэффициентом жесткости
рессоры

Пусть
 тогда корни
равны между собой (и равны отрицательному
числу
тогда корни
равны между собой (и равны отрицательному
числу
 ).
Поэтому общее решение будет
).
Поэтому общее решение будет
 (3)
(3)
Здесь
отклонение также стремится к нулю при
 ,
однако не так быстро, как в предыдущем
случае (благодаря наличию сомножителя
,
однако не так быстро, как в предыдущем
случае (благодаря наличию сомножителя
 ).
).
Пусть
 то есть отсутствует сила сопротивления.
Уравнение (1) примет вид
то есть отсутствует сила сопротивления.
Уравнение (1) примет вид
 (4)
(4)
 аракткристическое
уравнение имеет вид
аракткристическое
уравнение имеет вид
 а его корни равны
а его корни равны
 Общее решение
Общее решение
 (5)
(5)
В
последней формуле произвольные постоянные
 заменим другими. Именно, введем постоянные
заменим другими. Именно, введем постоянные
 связанные с
соотношениями
связанные с
соотношениями
 ,
,
 .
.
 через
определяются так:
через
определяются так:
 ,
,
 .
.
Подставляя значения в формулу (5), будем иметь

Или
 (6)
(6)
Колебания
в этом случае называются гармоническими.
Интегральными кривыми являются синусоиды.
Промежуток времени
 ,
за который аргумент синуса изменяется
на
,
за который аргумент синуса изменяется
на
 ,
называется периодом
колебаний; в данном случае
,
называется периодом
колебаний; в данном случае
 Частотой
колебания
называется число колебаний за время
;
в данном случае частота равна
Частотой
колебания
называется число колебаний за время
;
в данном случае частота равна
 ;
;
 - величина наибольшего отклонения от
положения равновесия – называется
амплитудой
колебания;
- величина наибольшего отклонения от
положения равновесия – называется
амплитудой
колебания;
 называется начальной
фазой.
График функции (6) изображен на рис.6
называется начальной
фазой.
График функции (6) изображен на рис.6
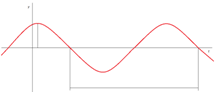
Рис.6
В электротехнических и других дисциплинах широко используют комплексное и векторное изображения гармонических колебаний.