

8Поняття вектора.Лінійні дії над векторами.
Вектор-направл відрізок AB, де А- початок, B- кінцева точка вектора.
Нуль-вектор( )-вектор
у якого початок і кінець збігаються.
)-вектор
у якого початок і кінець збігаються.
Будьякий вектор хар-ться напрямком і довжиною(модулем)
Нуль вектор: | |=0,напрям-невизначений.
Колінеар
вектори
 і
і
 , якщо лежать на одній, або паралельних
прямих
, якщо лежать на одній, або паралельних
прямих
 -колінеарні
співнапрямлені
-колінеарні
співнапрямлені
 -
колінеарні протилежно напрямлені
-
колінеарні протилежно напрямлені
Вектори і називаються рівними, якщо:
| |=| | 2)
Зауваження: рівний , можна одержати з паралельним перенесенням Вектор є вільним відносно точки прикладення.
Лінійні Операції над векторами
| |=| |*| |
, >0 , <0
=
 =0
або
=
=0
або
=
Вектор - називається протилежним , якщо - =(-1)
Зауваження:колінеарність || =
Якщо , то | | 0.
Ортом вект а наз одинич вект, що має той самий напрям, що і а:
 , |
, | |=1
тоді
=|
|*
|=1
тоді
=|
|*
Властивості добутку вектора на скаляр
1* = 2)(

 )
=
(
)
)
=
(
)
Сумою
Векторів
і
називаеться вектор
 =
+
,який
визначається за правилом трикутника ,
або паралелограма.Узагальненим правилом
трикутника є правило многокутника.
=
+
,який
визначається за правилом трикутника ,
або паралелограма.Узагальненим правилом
трикутника є правило многокутника.
Різниця: = - це такий вектор, що + =
Властивості суми векторів:
комутативність: + = +
асоціативність: + + = ( + )+
дистрибутивність ( + )= +
 *
=
+
*
=
+
4) + = +(- )=
9.Лін
комб вект
 —це
вектор
—це
вектор
 =
= С-ма
векторів
С-ма
векторів
 лінійно-залежна, якщо існ скаляри
лінійно-залежна, якщо існ скаляри
 не всі =0, такі що лін. комбінація векторів
=
не всі =0, такі що лін. комбінація векторів
=
С-ма
векторів
—лін-незалежна,
якщо рівність
 можлива лише тоді, коли всі
можлива лише тоді, коли всі =0
=0
Властивості лін.-залежних і лін.-незалежних векторів:
1)Якщо
сист. векторів лін.-залежна, то принаймні
1 з векторів с-ми є лін. комб інших.
Довед:
Нехай
лін.-залежна,тоді
 є
R.,
тоді
є
R.,
тоді .
.
 це
лін. комб вект
це
лін. комб вект
2)Якщо
сист. векторів лін.- незалежна, то вона
не містить
,
та жоден вектор системи не є лін. комб.
інших векторів системи. Доведення:а)
нехай с-ма містить
, тоді
 ,
,
 .Отже,
сист. лін.-залежна, що суперечить умові.
б)
.Отже,
сист. лін.-залежна, що суперечить умові.
б)
 —
— ø, тобто
ø, тобто
 не є лін. комбінацією інших векторів.
не є лін. комбінацією інших векторів.
Вектори
компланарні-вектори,
які лежать в 1 або парал площинах.
ТЕОРЕМА:В
множині всіх компл векторів будь-які 2
ненул неколінеарні вектори є
лінійно-незалеж, а будь-який 3-й вектор
є лін. комбін цих векторів. Доведення:
Нехай
 не
||
не
|| ,
,
 .
Доведемо, що
і
лін.-незалежні. Нехай
і
лін.-залежні, тоді
.
Доведемо, що
і
лін.-незалежні. Нехай
і
лін.-залежні, тоді
 а це суперечить умові. Отже,
і
лін- незалежні.
а це суперечить умові. Отже,
і
лін- незалежні.
Розгл.
3 вектори
,
і
, зведені в 1 точці. Через кінець
проведемо прямі паралельно
і
.
= .
В силу колінеарності відповідних
векторів, маємо
.
В силу колінеарності відповідних
векторів, маємо
 =
= ,
,
 =
= .
Тоді
=
+
.
Отже,
є лін комб.
і
.
Зауважимо, що розклад
за
і
є
однознач.(Довед: нехай є друг вектор
.
Тоді
=
+
.
Отже,
є лін комб.
і
.
Зауважимо, що розклад
за
і
є
однознач.(Довед: нехай є друг вектор
 =
+
=
+ )коорд.
вектора
)коорд.
вектора
 , тобто ці в-ри є рівними=>
співпад
з
.
Ми дійшли до суперчн,
-єдин.
, тобто ці в-ри є рівними=>
співпад
з
.
Ми дійшли до суперчн,
-єдин.
Множина
всіх компл в-рів з визнач оперціями
додав векторів та множ на скаляр є
прикладом векторного прост. Найбіл
к-сть лін-незал вект простору назив.
його розмір, а сама система лін-незал
векторів назив. базисом простору.Множина
всіх компл вкторів є вект прост розмірності
2 і познач.
 .
Базис
склад з буд-як 2 неколін векторів.
ТЕОРЕМА:множині всіх компл векторів
геом. прост будь-які 3 некомпл, ненул,
поарно неколін вектори є лінійно-незал,
а будь-який 4-й вектор є лін. комб цих
векторів
.
Базис
склад з буд-як 2 неколін векторів.
ТЕОРЕМА:множині всіх компл векторів
геом. прост будь-які 3 некомпл, ненул,
поарно неколін вектори є лінійно-незал,
а будь-який 4-й вектор є лін. комб цих
векторів
 .
.
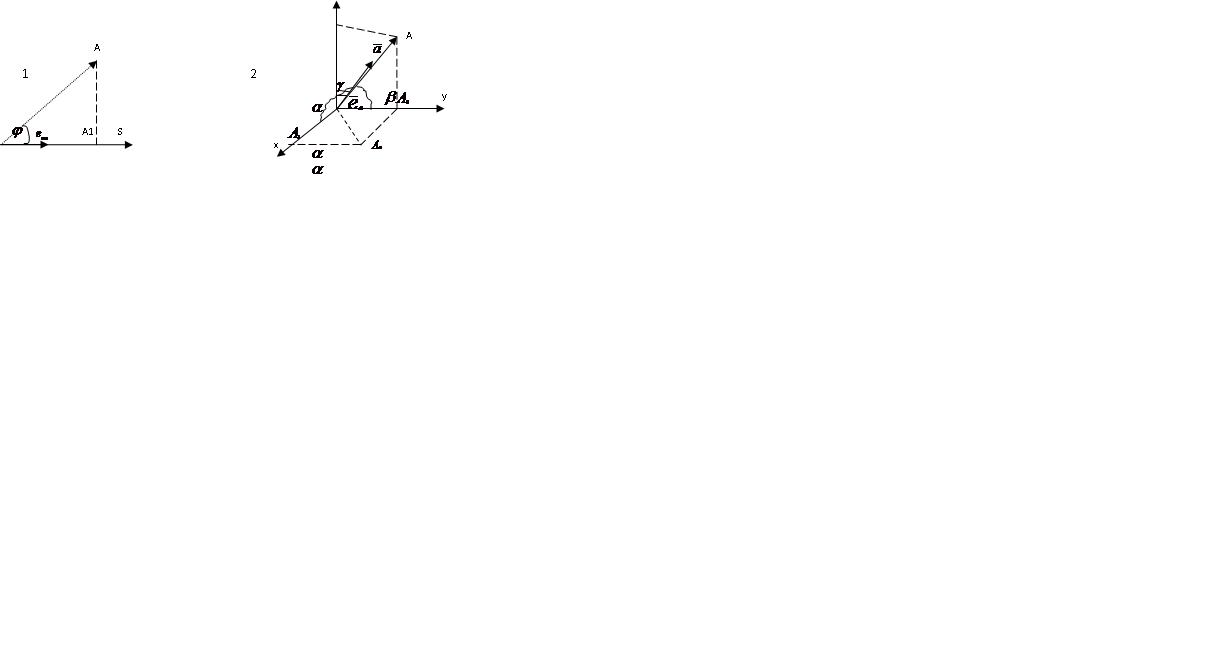
10.Числова вісь у прост- пряма OS , на якій визначено напрям, поч відліку, один відріз. Вісь зручно задав за доп орту. Розгл. Чис вісь:
O
 =
=
 =
= .
Властив числ проекції:1)
.
Властив числ проекції:1)
 .2)
.2) 3)
3)
 4)
4)
Числ
пр
на
—
проекція
на вісь, що задається
. .
.
Розглянемо
в-ри в просторі R3
,
ортоном базис
 ,
,
 .
В-ри попарно ортогон
.
В-ри попарно ортогон
 .
Зведемо ці в-ри до спіл поч 0 та розташ
їх так, щоб
утвор праву трійку.Візьмемо будь-як
вектор і відклад від т. О.Провед через
т.А площини ІІ до Ох, Оу, Оz.
Одержимо точки
.
Зведемо ці в-ри до спіл поч 0 та розташ
їх так, щоб
утвор праву трійку.Візьмемо будь-як
вектор і відклад від т. О.Провед через
т.А площини ІІ до Ох, Оу, Оz.
Одержимо точки
 при перет з осями
при перет з осями


 визнач
числ пр
на осі коорд.
визнач
числ пр
на осі коорд.
 .
=
.
= ,
,
 =
= ,
,
 =
= .
X=
.
X= ,
y=
,
y= ,z=
,z= Отже,
маємо розклад
за ортами дек прямок с-ми коорд.
=хі+yj+zk=(x,y,z)
Отже,
маємо розклад
за ортами дек прямок с-ми коорд.
=хі+yj+zk=(x,y,z)
Введ
кути між
і ос коор:
 ,
,
 ,
, З
власт 2 пр маємо: cos
=
З
власт 2 пр маємо: cos
= ;
cosb=
;
cosb= ;
cosj=
;
cosj= (за
означ. cos)
За теор. Піф з мал. маємо:
(за
означ. cos)
За теор. Піф з мал. маємо:
 .
cos
.
cos Ці cos
кутів є коорд. орта: cos
Ці cos
кутів є коорд. орта: cos Переформ
в коорд. формі означ та лін. опер над
вект:1)
=(0;0;0)
2)
=
,
=(x1;y1;z1),
(x2;y2;z2)=>x1=x2,
y1=y2,z1=z2;
3)
Переформ
в коорд. формі означ та лін. опер над
вект:1)
=(0;0;0)
2)
=
,
=(x1;y1;z1),
(x2;y2;z2)=>x1=x2,
y1=y2,z1=z2;
3)
 =(
=( x;
y;
z).
4)
+-
=(x1+-x2;y1+-y2;z1+-z2)
x;
y;
z).
4)
+-
=(x1+-x2;y1+-y2;z1+-z2)
4)
= ,
A(x1,y1,z1),
B(x2;y2;z2);
=(x2-x1;y2-y1;z2-z1)
,
A(x1,y1,z1),
B(x2;y2;z2);
=(x2-x1;y2-y1;z2-z1)