

7.Определение передаточной функции тиристорного преобразователя
Технические данные тиристорного преобразователя ПТТР представлены в таблице №4.
Передаточная функция тиристорного моста вместе с системой импульсно-фазового управления СИФУ, как правило, апроксимируется апериодическим звеном первого порядка с постоянной времени Тт.п.=0,01 с., что обусловлено дискретностью подачи отпирающих импульсов и особенностью работы управляемого тиристорного выпрямителя.
![]() ,
,
где Uт.п - выходное напряжение тиристорного преобразователя;
Uу -напряжение, подаваемое на вход СИФУ тиристорного преобразователя;
Кт.п -коэффициент передачи тиристорного преобразователя.
Следует отметить, что коэффициент тиристорного преобразователя не является величиной постоянной и изменяется в зависимости от величины управляющего напряжения.
![]()
![]()
8. Настройка контура тока:
Структурная схема контура тока:
Логарифмические характеристики контура тока:
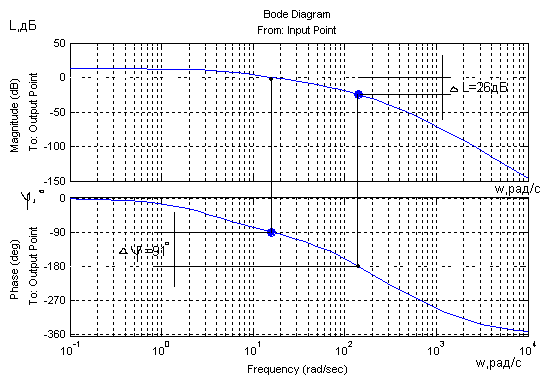
Из логарифмических характеристик видно, что контур тока не обладает требуемой устойчивостью по фазе, т.к. =91. Для ее обеспечения применим регулятор. Тогда получаем следующие характеристики:
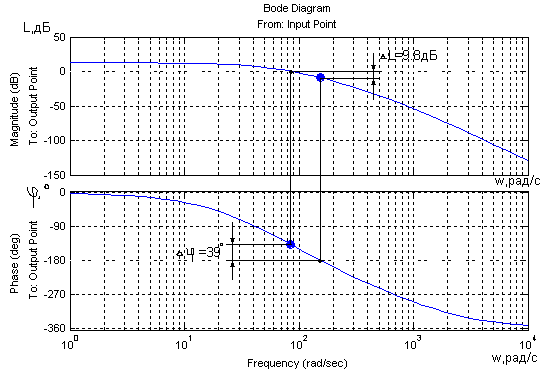
Контур тока теперь обладает следующими запасами устойчивости:
По амплитуде: L= 9,8 дБ.
По фазе: = 39.
9. Определение передаточной функции промежуточного усилителя
В современных тиристорных приводах постоянного тока для улучшения статических и динамических характеристик системы в промежуточные усилители вводятся различные корректирующие цепи, чем обеспечивается регулирование необходимых динамических свойств системы.
В системах позиционирования статическая
ошибка определяется из выражения:
![]() ,
,
Где К - коэффициент усиления разомкнутой системы;
ip- передаточное отношение редуктора;
Мс - приведённый момент сопротивления на валу двигателя,
- жёсткость механической характеристики
системы,
![]()
Ошибка слежения при установившемся
вращательном движении механизма с
максимальной скоростью:
![]() ,
,
где мехmax- максимальная скорость вращения механизма.
Суммарная ошибка не должна превышать заданной ошибки:
![]() ,
откуда, подставив числовые значения,
находим необходимый коэффициент
разомкнутой системы
,
откуда, подставив числовые значения,
находим необходимый коэффициент
разомкнутой системы![]() .
Т.к. коэффициент некорректированной
разомкнутой системы равен 12:
.
Т.к. коэффициент некорректированной
разомкнутой системы равен 12:
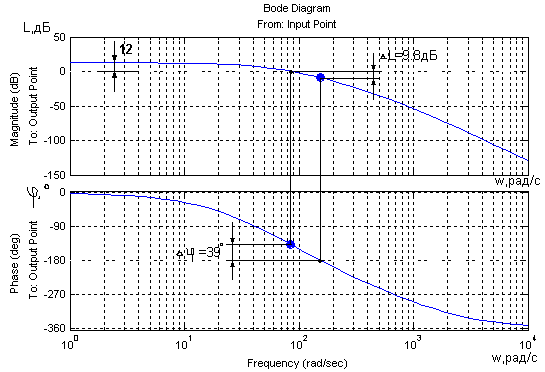
то примем коэффициент усиления
промежуточного усилителя равным
![]() Реализация такого усилителя на
операционном усилителе имеет вид:
Реализация такого усилителя на
операционном усилителе имеет вид:
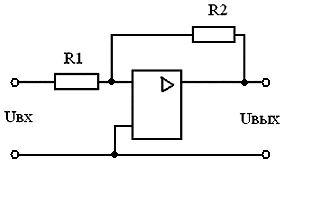
Для такого усилителя имеем:
Кп = R2/R1.
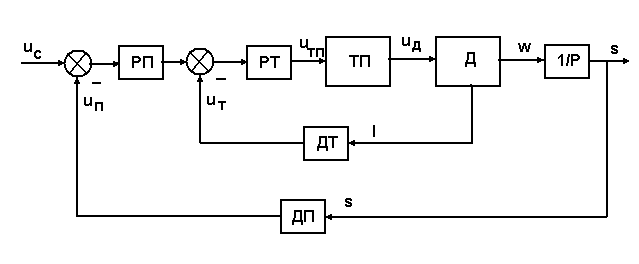
10. Структурная схема следящей сар
Структурная схема следящей САР имеет следующий вид:
Логарифмические характеристики для этой схемы имеют вид:
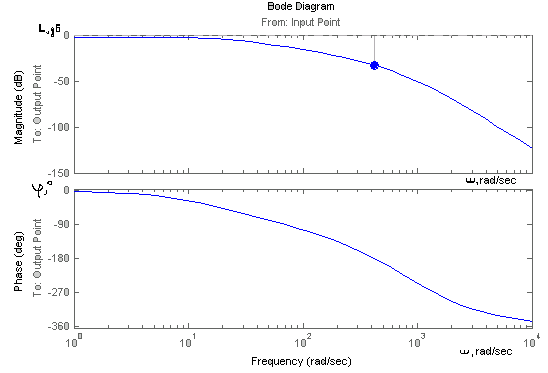
Как видно из характеристик, система не обладает необходимым запасом устойчивости. Следовательно, необходимо применение регулятора.
Логарифмические характеристики при использовании регулятора имеют вид:
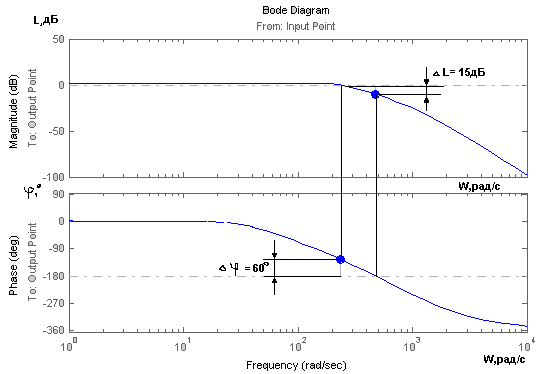
система получает требуемый запас устойчивости по фазе ( около 60 градусов), и по амплитуде ( около 15 дБ).
Техническая реализация регулятора:
Передаточная функция имеет вид:
![]() ,
гдеT1 =R3*C,T2 = (R2 +R3)*C.
,
гдеT1 =R3*C,T2 = (R2 +R3)*C.
11.Анализ и исследование переходных характеристик системы:
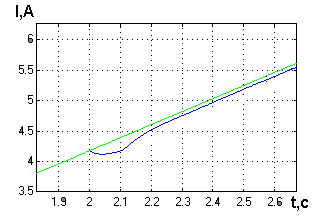
Построим графики переходных процессов для данной системы:
При изменении Мс от 0 до максимального при минимальной скорости задающего сигнала:
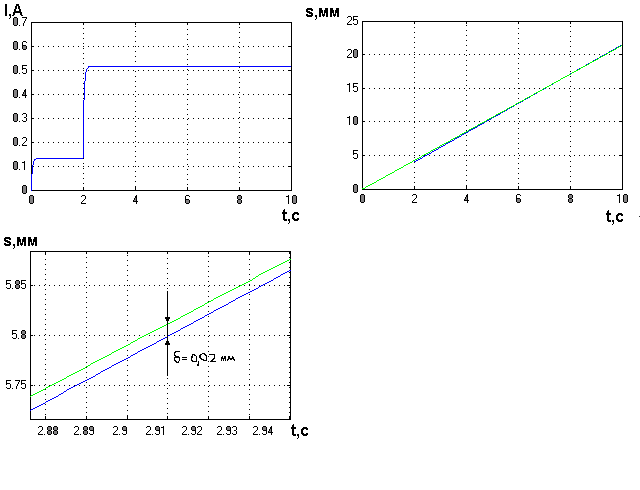
Время переходного процесса:
Переходный процесс апериодический, через 0.2-0,3с. значение выходной переменной входит в трубку точности, заданную в задании.
При максимальной скорости задающего сигнала:
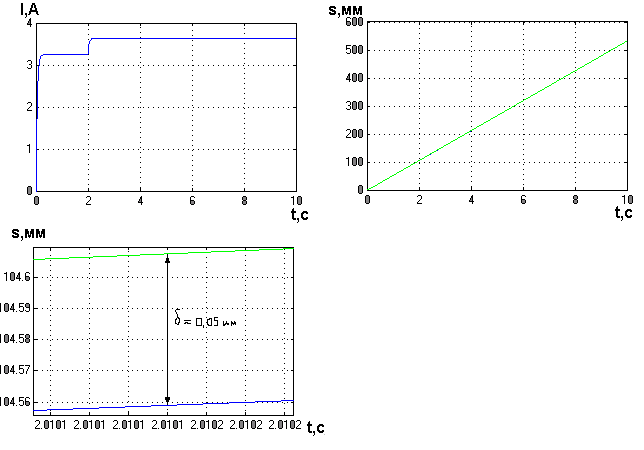
Статическая ошибка не превышает 0,05мм, что вполне соответствует требованиям задания ( точность слежения 0,1мм).