Лекции по ЭМС для заочников
.doc
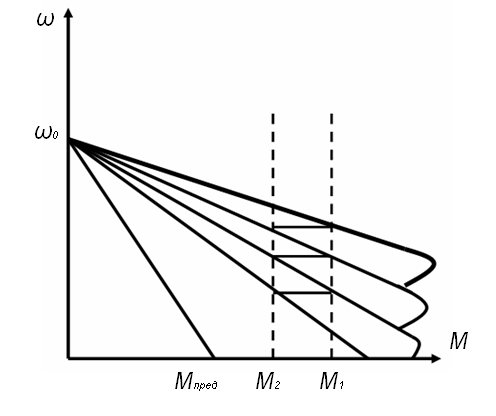
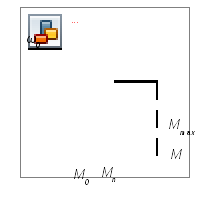
M1 - максимальный пусковой момент соответствующий полному сопротивлению цепи якоря.
М2 - момент при котором происходит переключение реостата на сведущую механическую характеристику и назад.
МПРЕДВАРИТ - предварительный момент благодаря наличию которого пуск происходит плавно без рывков он служит для натяжения механизма (выбор слабины, канатов, цепи).
Для двигателей последовательного возбуждения.
Пуск АД
Для пуска АД с фазным ротором используют пусковые реостаты включенные в цепь ротора. Аналогично ДПТ пусковые резисторы уменьшают пусковой ток, а затем автоматически выводятся из цепи.
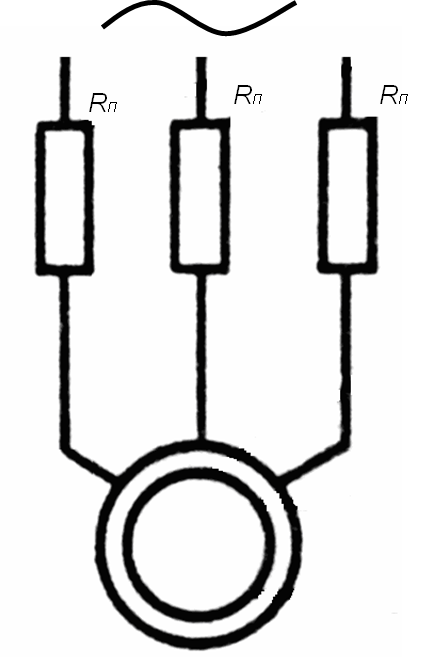
Реостатный пуск
В маломощных сетях, сечение проводов которых невелико, а протяженность значительная, для ограничения пускового тока применяют пуск с активным или индуктивным сопротивлением, включенным в цепь обмотки статора. Соответствующим подбором сопротивления Rдоб можно ограничить пусковой ток до любого необходимого значения. Однако при этом уменьшаются пусковой и критический моменты из-за снижения напряжения на обмотке статора, вызванного падением напряжения на сопротивлении Rдоб.
АД с короткозамкнутым ротором.
О
Запуск СД.
При подключении СД к источнику питания пусковой момент не развивается, ротор по причине инерционности не может мгновенно достичь частоты вращения равной частоте вращения магнитного поля статора, поэтому между полюсами возбуждения ротора и вращающимся полем статора не возникает прочной магнитной связи создающей синхронный вращающий момент. Для пуска СД необходимо привести ротор во вращение с частотой близкой к частоте вращения статора. Существует несколько способов пусков двигателя, для его реализации используют стержни пусковой обмотки расположенные в полюсных наконечниках ротора. Для пуска СД обмотки возбуждения вначале подключают на сопротивление, которое превышает активное сопротивление обмотки в 10 раз. Статорную обмотку подключают к 3-х фазной сети.
Пуск двигателя с переключением обмоток статора со звезды на треугольник
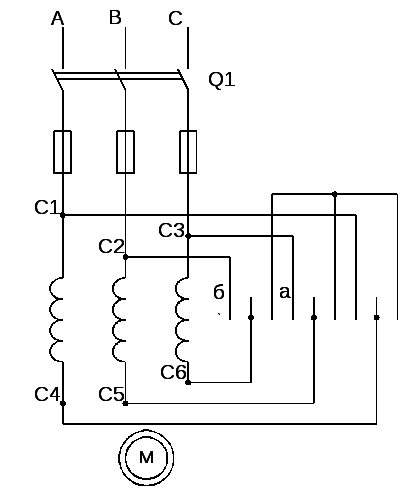
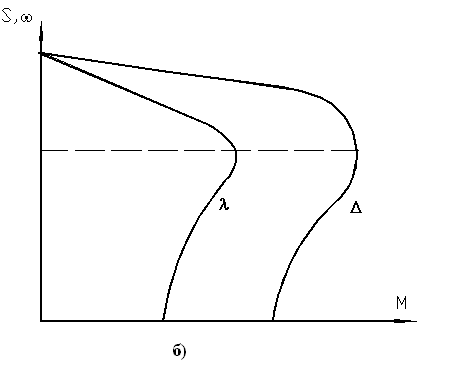
Рисунок - Схема пуска асинхронного двигателя с короткозамкнутым ротором путем переключения обмоток статора со звезды на треугольник.
Пуск двигателя с переключением обмоток статора со звезды на треугольник возможен, когда обмотка статора может быть соединена звездой и треугольником. Установив предварительно переключатель Q2 в положение а (соединение звездой), выключателем Q1 включают двигатель в сеть. После окончания пуска выключатель Q2 перекидывают в положение б, благодаря чему обмотка статора оказывается соединенной треугольником. Напряжение на фазе обмотки статора во время пуска будет меньше номинального в 3 раза. Вследствие этого, ток фазы уменьшится в той же степени, а поскольку линейный ток больше фазного в 3 раза, пусковой линейный ток при таком способе пуска будет меньше по сравнению с прямым пуском в 3 раза. Одновременно в 3 раза уменьшатся пусковой и максимальный моменты, так как они пропорциональны квадрату фазного напряжения.
Ввиду значительного снижения пускового момента указанный способ возможен в основном при малых моментах сил сопротивления на валу двигателя.
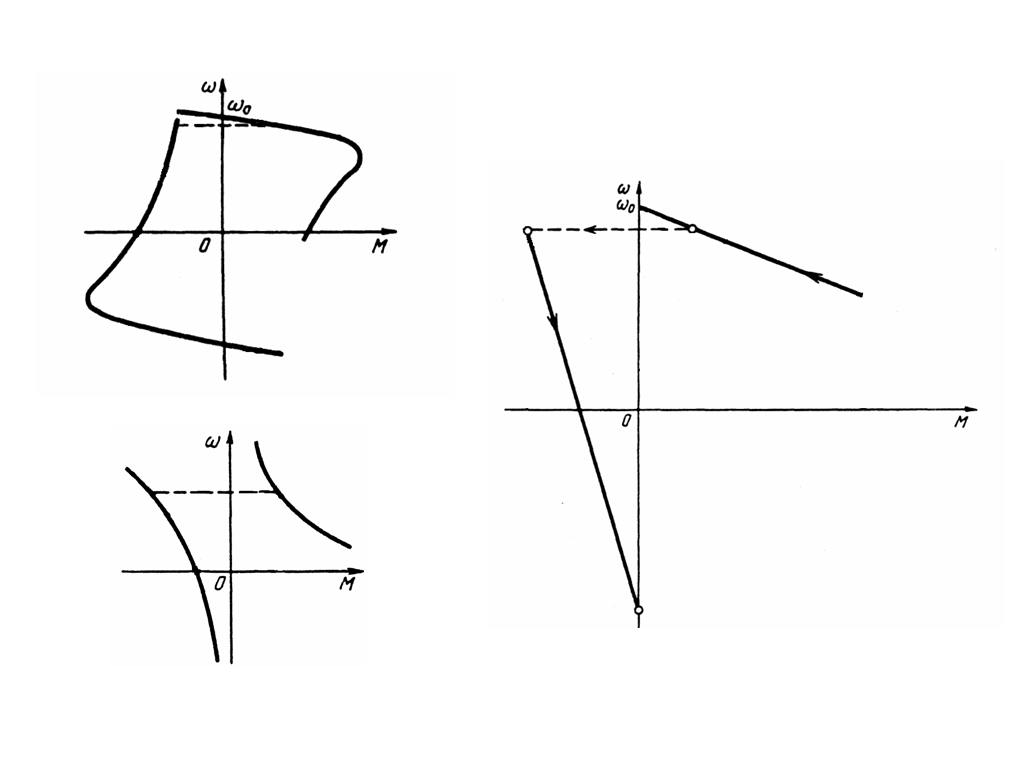
Тормозные режимы двигателя.
Возможны 3 вида
электрического торможения: генераторный
с возвратом энергии в сеть, динамическое
торможение и противовключением.
Генераторное торможение осуществляется
при скорости вращения якоря или ротора
больше скорости идеального холостого
хода. В этом случае ЭДС двигателя больше
подводимого напряжения к двигателю, и
ток тормозной определяется
![]() .Из
этого выражения видно что направление
тока меняется на боратное. т.к. ток
поступает от двигателя в сеть такой
режим торможения применяется при
торможении спуска груза когда груз
опускаясь может вращать якорь со
скоростью ω>ω0.
.Из
этого выражения видно что направление
тока меняется на боратное. т.к. ток
поступает от двигателя в сеть такой
режим торможения применяется при
торможении спуска груза когда груз
опускаясь может вращать якорь со
скоростью ω>ω0.
В АД направление вращения вращающегося магнитного поля статора совпадает с направлением вращения ротора.
Динамическое торможение может быть использовано при любой скорости вращения якоря двигателя. В этом случае двигатель отключается от сети и замыкается на тормозное сопротивление, обмотка возбуждения остается включенной в сеть для создания неизменного магнитного потока.

Величина тока
определяется
![]() ,
для уменьшения величины тормозного
тока в цепь включается динамическое
сопротивление
,
для уменьшения величины тормозного
тока в цепь включается динамическое
сопротивление
![]() .
.
Для ДПТ последовательного возбуждения используются режимы динамического торможения, в этом случае двигатель отключается от сети и замыкается на тормозное сопротивление.
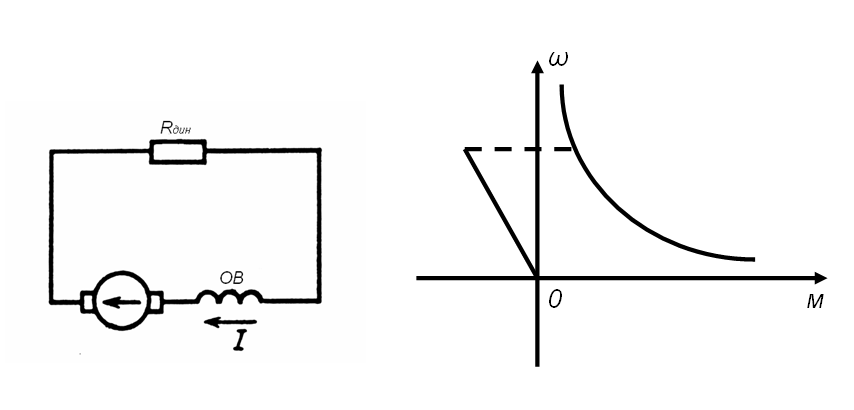
В АД динамическое торможение осуществляется подключением обмотки статора к источнику постоянного тока, обмотка ротора для АД с фазным ротором замыкается на сопротивление. Машина начинает работать как синхронный генератор с неподвижными полюсами. Ток постоянно протекает по обмотке статора создавая неподвижное в пространстве магнитное поле, т.е. возбуждает АД. Превращение ротора в нем наводится ЭДС под действием, которого в обмотке ротора протекает ток. Создаваемый магнитный поток неподвижен в пространстве. Взаимодействие тока ротора с результирующим магнитным полем АД создается тормозной момент за счет чего достигается эффект торможения.
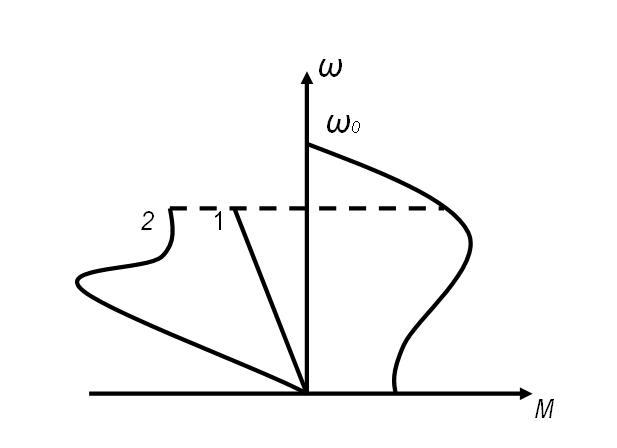
АД с фазным ротором
2 - АД с КЗ ротором
Торможение противовключением.
Для ДПТ параллельного
или независимого возбуждения возможно
при всех значениях скорости вплоть до
полной остановки. При противовключении
якорь вращается в обратную сторону, при
этом ЭДС действует согласно с приложенным
напряжением
![]() .
Подобный режим можно осуществить только
при ведении в цепь якоря большого
сопротивления чтобы ограничить ток
торможения.
.
Подобный режим можно осуществить только
при ведении в цепь якоря большого
сопротивления чтобы ограничить ток
торможения.
Конденсаторное торможение
Конденсаторное торможение двигателя осуществляется следующим образом. К зажимам двигателя подключают конденсаторы, которые в рабочем режиме повышают коэффициент мощности (cos φ) сети. После отключения пускателя двигателя от сети возникает генераторный режим самовозбуждения, тормозные механические характеристики которого показаны на рисунке 6 для различных значений емкости.
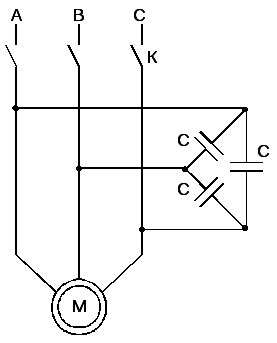
Схема конденсаторного торможения
n
MT

Рисунок 6 - Механические характеристики двигателя при конденсаторном торможении.
Обычно частота токов статора низка (составляет 2...5%. от частоты питавшей сети). Следовательно, частота вращения магнитного поля статора будет невысокой (60...150 мин -1), скорость двигателя быстро снижается, и при скорости равной скорости вращающегося поля токов разряда, торможение прекращается. Если на валу двигателя нет механической нагрузки, конденсаторное торможение не может обеспечить полной остановки двигателя, поэтому этот вид торможения используют совместно с другими видами, обычно с динамическим.
Конденсаторное торможение применяют для двигателей, мощность которых не превышает 4...5 кВт, так как для более крупных двигателей значительно возрастают затраты на монтаж и эксплуатацию конденсаторных установок.
Регулирование скорости ЭП
Основные сведения о регулировании скорости.
регулированием называется принудительное изменение скорости в зависимости от требований производственного процесса. Основными показателями, характеризующими различные способы регулирования скорости является: 1-диапазон регулирования, 2-экономичность способов регулирования, 3-плавность, 4-стабильность работы на заданной скорости, 5-допустимая нагрузка.
Диапазон или предел регулирования определяется отношением максимальной угловой скорости к минимальной при моменте вращения на валу равен номинальному значению.
![]()
Экономичность регулирования определяется потерями в регулировочных устройствах и характеризующиеся КПД двигателя. Плавность регулирования характеризуется отношением двух соседних скоростей при регулировании.
![]()
Плавность регулирования определяется количеством ступеней регулирования. Чем больше ступеней имеет регулирующее устройство, тем большую плавность можно получить.
Стабильность работы на заданной скорости характеризуется изменением угловой скорости при заданном отклонении момента нагрузки и зависит от жесткости механической характеристики. Стабильность работы тем выше, чем жестче механическая характеристика. Допустимая нагрузка при регулировании скорости зависит от способа регулирования и определяется допустимым по условию нагрева моментом, возможно регулирование скорости осуществлять при постоянном моменте или при постоянной мощности.
Регулирование скорости ДПТ.
![]()
Из формулы видно что скорость регулировать возможно изменением RЯ,
Ф - магнитного потока, и подводимого напряжения.
а) ДПТ параллельного, независимого возбуждения.
Способ введения в цепь якоря дополнительные сопротивления используется для кратковременного регулирования скорости т.к. этот способ имеет ряд недостатков.
1. значительные потери мощности.
2. уменьшение жесткости механической характеристики при увеличении сопротивления приводит к снижению стабильности работы привода.
3. уменьшение пределов регулирования с уменьшением нагрузки на валу двигателя. При малых нагрузках регулирование практически невозможно.
ДПТ параллельного возбуждения
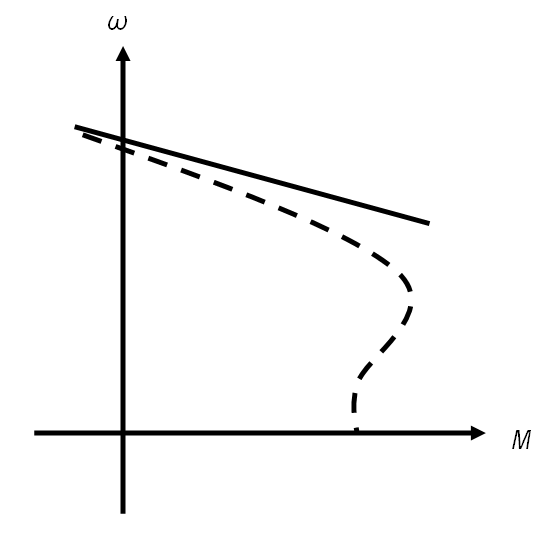
Регулирование скорости двигателя путем изменения магнитного потока производится при помощи реостатного включения в цепь общего возбуждения изменяя ток возбуждения изменяется магнитный поток. С уменьшением магнитного потока скорость возрастает. Этот способ регулирования скорости возможен только для регулирования скорости выше номинальной т.к. магнитная система в номинальных режимах насыщена, поэтому увеличение тока возбуждения не вызывает заметного увеличения магнитного потока, а следовательно снижения скорости.
Механические характеристики отличаются от электромеханических тем, что при уменьшении магнитного потока скорость холостого хода возрастает, а момент короткого замыкания уменьшается.
Это более экономичный
способ т.к. ток возбуждения составляет
1-10% от тока номинального. Для различного
значения U
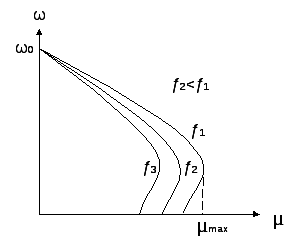
углов скорость(ω) будет определяться:
![]() ;
;![]()
ДПТ - последовательного возбуждения.
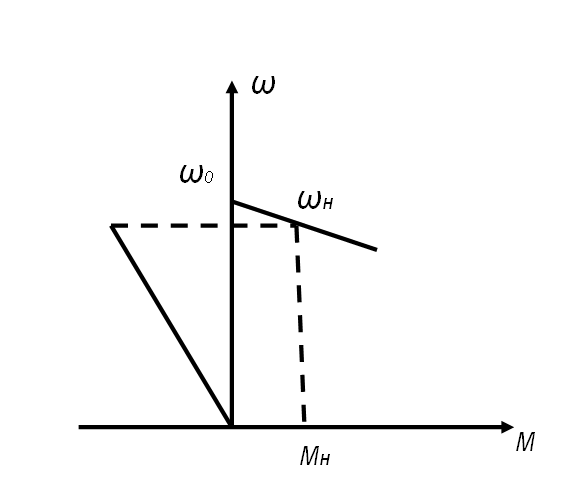
При введении в цепь якоря добавочного сопротивления скорость будет уменьшаться, т.е. стабильность характеристик будет невысокой. Диапазон регулирования 2; 2,5:1. Недостатки такие же что и для ДПТ параллельного возбуждения. Используется такой способ на электровозах, кранах, трамваях. Изменение магнитного потока можно осуществлять путем включения регулирующего резистора параллельно обмотке якоря или обмотке возбуждения.
В первом случае увеличение сопротивления приводит к уменьшению тока шунта следовательно к уменьшению тока возбуждения и увеличению скорости. При сопротивлении стремящемуся к бесконечности получаем естественную характеристику, при уменьшении регулирующего сопротивления ток шунта и ток возбуждения будет увеличиваться, скорость падать и получим естественную характеристику.
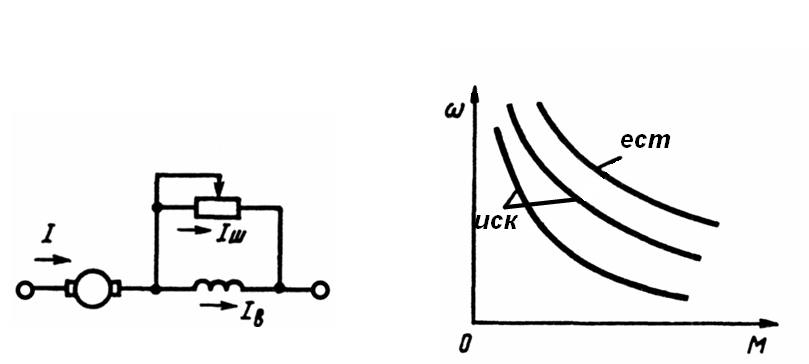
Во втором случае с увеличением регулирующего сопротивления, Iш уменьшается и при Rрег=∞Iш будет равен 0. А ток возбуждения равен току якоря, при этом получим естественную характеристику двигателя. С уменьшением Rрег ток шунта возрастает, ток возбуждения уменьшается и скорость возрастает, получим семейство искусственных характеристик.
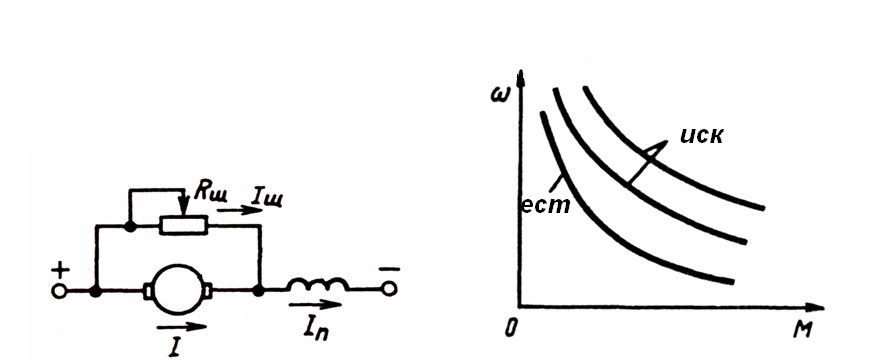
Первым способом можно регулировать скорость ниже номинальной, а во втором случае выше номинальной.
![]() ;
;![]() ;
;![]()
Следовательно, изменение U приводит к тому, что механические характеристики будут располагаться параллельно друг другу, т.е. иметь одинаковую жесткость и высокую стабильность механических характеристик.
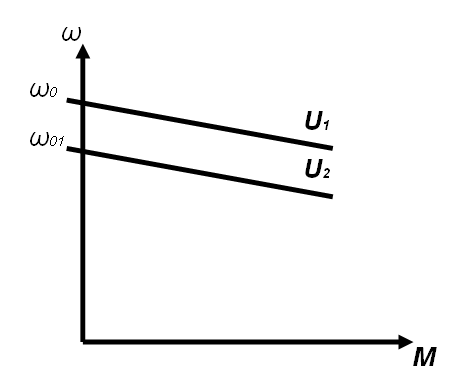
В разомкнутых системах диапазон регулирования соответствует 10:1 в замкнутых системах диапазон 1000:1. Этот способ является экономичным по необходимости учитывать потери мощности в устройстве, посредством которого происходит изменение напряжения, и затраты на это устройство. Такой способ характерен для системы (Г-Д) или управляемый выпрямитель-двигатель.
Регулирование скорости ДПТ последовательного возбуждения изменением подводимого напряжения, осуществляется с помощью генератора, тиристорного преобразователя или последовательно параллельным включением двигателя.
При последовательно параллельном включении двигателей можно получить две ступени скорости благодаря изменению напряжения подводимого к двигателям. Такой способ осуществляется в том случае если один производственный механизм приводится одновременно двумя двигателями половинной мощности, такой способ регулировке используют в кранах, трамваях, ножницах по резке металла. При последовательном включении двигателей, на каждый двигатель приходится половина напряжения сети. При параллельной работе каждый двигатель оказывается включен на полное напряжение.
Регулирование скорости АД.
Угловая скорость АД определяется:
![]()
Из
уравнения видно, что ![]() можно изменяя число пар полюсов и частоту
тока сети. Скольжение зависит от активного
сопротивления цепи ротора. Изменяя
сопротивление цепи ротора можно
регулировать скорость. Этот способ
используется для АД с фазным ротором и
обладает рядом недостатков; большие
потери на регулировочных резисторах,
уменьшение жесткости характеристик с
ростом
сопротивления. Такой способ регулировки
используется для кратковременного
снижения скорости и используется в
подъемно транспортных устройствах,
вентиляторах, насосах мощностью до 1000
кВт. Изменение скорости путем изменения
числа пар полюсов возможно для двигателей,
имеющих обмотку статора
с возможным переключением, с целью
изменения числа пар полюсов. Число
пар полюсов только целое число,
регулирование скорости происходит
ступенчато.
Этот способ регулировки используется
только для АД с короткозамкнутым
ротором, где переключение обмотки
статора происходит на целое
число р обмотка ротора автоматически
приспосабливается к избранному числу
полюсов. Переключение полюсов
осуществляется изменением напряжения
тока в отдельных половинах каждой фазной
обмотки.
можно изменяя число пар полюсов и частоту
тока сети. Скольжение зависит от активного
сопротивления цепи ротора. Изменяя
сопротивление цепи ротора можно
регулировать скорость. Этот способ
используется для АД с фазным ротором и
обладает рядом недостатков; большие
потери на регулировочных резисторах,
уменьшение жесткости характеристик с
ростом
сопротивления. Такой способ регулировки
используется для кратковременного
снижения скорости и используется в
подъемно транспортных устройствах,
вентиляторах, насосах мощностью до 1000
кВт. Изменение скорости путем изменения
числа пар полюсов возможно для двигателей,
имеющих обмотку статора
с возможным переключением, с целью
изменения числа пар полюсов. Число
пар полюсов только целое число,
регулирование скорости происходит
ступенчато.
Этот способ регулировки используется
только для АД с короткозамкнутым
ротором, где переключение обмотки
статора происходит на целое
число р обмотка ротора автоматически
приспосабливается к избранному числу
полюсов. Переключение полюсов
осуществляется изменением напряжения
тока в отдельных половинах каждой фазной
обмотки.
Схемы переключения обмоток статора.
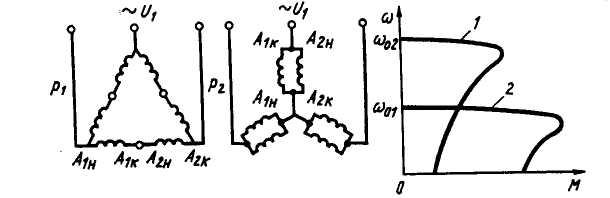
Соединение Треугольник- двойная звезда.

Соединение Звезда- двойная звезда.
В этом случае момент снижается в 2 раза а скорость возрастает в 2 раза.
Регулирование скорости изменением числа пар полюсов является не плавным, а ступенчатым, но этот способ является экономичным, механические характеристики отличаются жесткостью. В металлорежущих станках, вентиляторах, насосов, элеваторах, нефтяной промышленности.
Частотное регулирование скорости АД.
![]()
При регулировании частоты возникает необходимость регулирования напряжения источника т.к. U≈E≈kфf.
Если при неизменном напряжении изменять частоту то поток будет изменятся обратно пропорционально частоте при уменьшении частоты поток возрастает, это приводит к изменению тока, увеличению температуры обмоток двигателя, т.к. происходит насыщение стали машины. При возрастании частоты сети поток уменьшается, но уменьшается момент. Регулировка таким способом возможна только в замкнутых системах. В разомкнутых системах напряжение регулируется функцией частоты по некоторому закону, зависящему от нагрузки.
Экономически выгодно частотное регулирование в повторно кратковременных режимах работы, где имеет место частое изменение направления вращения с интенсивным торможением. Для осуществления частотного регулирования используют преобразователи, на выходе которых меняется напряжение и частота. Преобразователи можно разделить на электромашинные и вентильное.
Электромашинное преобразование выполнено с промежуточным звеном постоянного тока и непосредственной связью. Если напряжение меняется пропорционально частоте, максимальный момент снижается это происходит в следствии уменьшении потока двигателя и увеличения доли падения напряжения на активном сопротивлении статора. При этом критическое скольжение уменьшается.
Для поддержания достаточной перегрев, способности во всем диапазоне регулирования необходимо при малых частотах, уменьшать напряжение в меньшей степени, чем снижается частота.
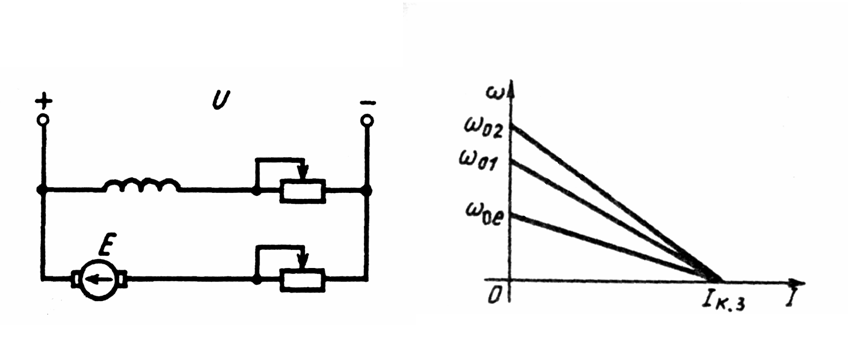
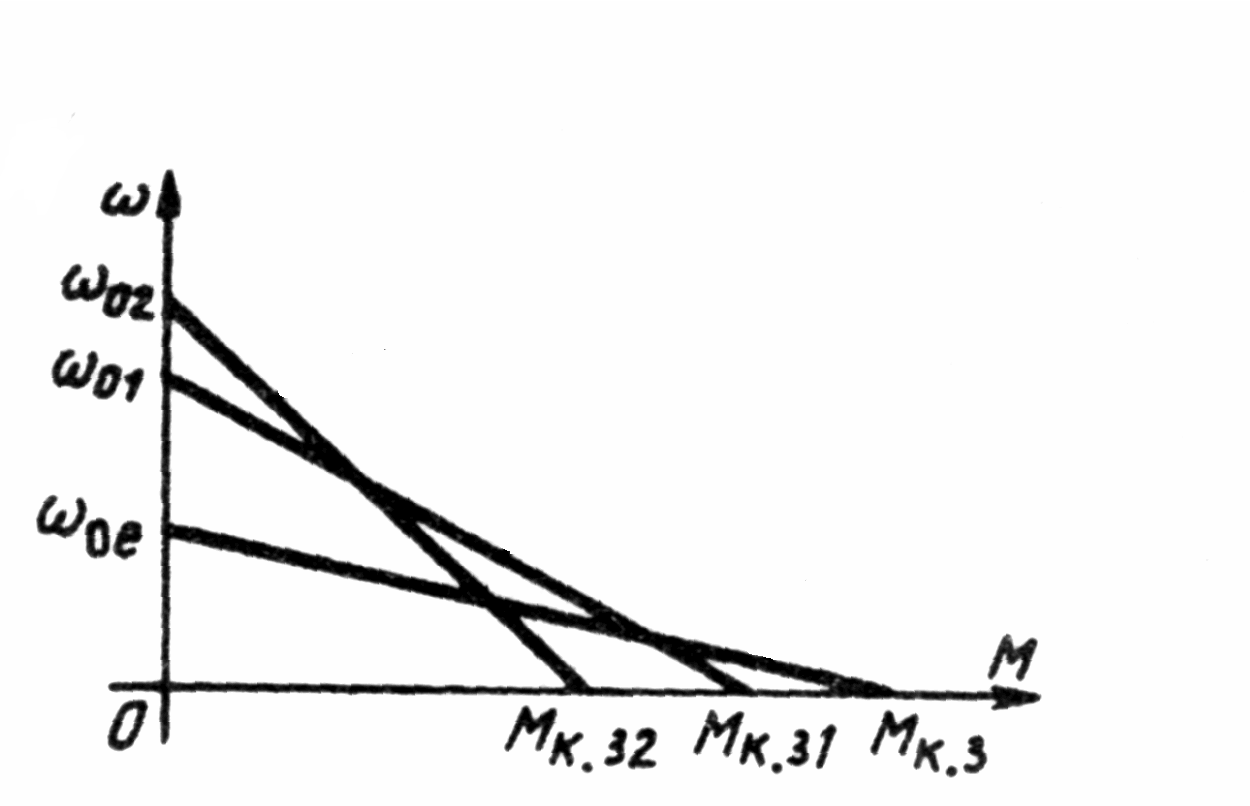
ЭП по системе генератор-двигатель (Г-Д).
В системе Г-Д любой режим работы двигателя можно получить изменением величины и полярности подводимого к якорю напряжения.
Уравнение механической характеристики системы Г-Д имеет вид.
![]() -
сопротивление цепи якоря состоит из
сопротивления якоря двигателя,
сопротивления
якоря генератора, и проводов;
-
сопротивление цепи якоря состоит из
сопротивления якоря двигателя,
сопротивления
якоря генератора, и проводов;
![]() -
ЭДС генератора.
-
ЭДС генератора.
Выбор мощности имеет большое значение т.к. определяет затраты и эксплуатационные расходы промышленных установок. При применении двигателя недостаточно мощности не обеспечивается нормальная работа механизма, снижается производительность, возможен быстрый выход из строя. При выборе двигателя с завышенной мощностью, ведет к увеличению расхода электроэнергии и снижению коэффициента мощности. Правильно выбранный по мощности двигатель должен быть загружен мощностью близкой к номинальной и не должен перегреваться выше допустимой температуры. Кроме того он должен обеспечивать нормальную работу при кратковременных перегрузках и удовлетворять условиям пуска. Выбор мощности производится по нагреву с последующей проверкой по перегрузочной способности и по условиям пуска. Допустимая температура нагрева двигателя определяется теплостойкостью применяемых изоляционных материалов. По теплостойкости изоляционные
материалы делятся на классы:
|
Класс |
A |
E |
B |
F |
H |
C |
|
Допустимая температура |
105 |
120 |
130 |
135 |
180 |
>180 |
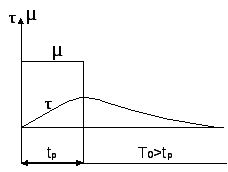
Номинальная мощность соответствует номинальным режимам работы при температуре окружающей среды 400, и эффективность охлаждения зависит от плотности окружающей газообразной среды. Максимально допустимая температура наиболее нагретых частей двигателя равна допустимой температуре нагрева изоляции. Температура максимального нагрева соответствует максимальному превышению температуры τmax. С увеличением температуры двигателя растет интенсивность отдачи тепла в окружающую среду, в следствии чего повышение температуры замедляется. Когда количество теплоты отдаваемого двигателем в окружающую среду становится равным количеству тепла выделяемого в двигателе, рост температуры прекращается и нагрев достигает установившегося значения.
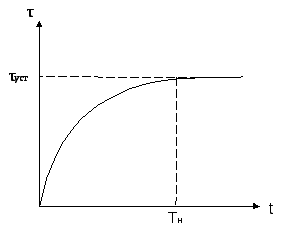
Тн - постоянная времени нагрева двигателя в течении которого двигатель достигает установившегося значения, если бы не было отдачи тепла в окружающую среду. В зависимости от условий ухудшения теплообмена постоянная теплообмена уменьшается. Для АД открытого исполнения Р≈ 10кВт Тн≈ 15-30мин, для закрытых АД Тн =25-75мин. Для мощных двигателей Р≈ 100 кВт Тн достигает несколько часов.
Процесс нагрева и охлаждения двигателя может характеризоваться различными постоянными времени., если при охлаждении двигателя вызванного его остановкой, условия его теплоотдачи изменятся, изменится и постоянная времени. Количественно ухудшение теплоотдачи при неподвижном роторе.
![]() ,
где А и А0
- теплоотдача соответственно при
неподвижном роторе и
номинальной
скорости вращения. Для двигателей с
независимой вентиляцией β=1.
Для двигателей без принудительного
охлаждения β=0,95-0,98, самовентилируемых
β=0,45-0,55, защищенных самовентиляцией
0=0,25-0,35.
,
где А и А0
- теплоотдача соответственно при
неподвижном роторе и
номинальной
скорости вращения. Для двигателей с
независимой вентиляцией β=1.
Для двигателей без принудительного
охлаждения β=0,95-0,98, самовентилируемых
β=0,45-0,55, защищенных самовентиляцией
0=0,25-0,35.
Мощность, которую может иметь двигатель не перегреваясь, выше допустимого предела зависит от продолжительности и характеристик нагрузки, различают 3 основных типа работы двигателя длительный, кратковременный, повторно-кратковременный. При длительном режиме работы рабочий период настолько велик, что перегрев двигателя достигает своего установившегося значения.
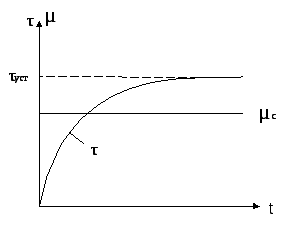
τ- превышение температуры двигателя над температурой окружающей среды;
τуст- установившееся значение превышения температуры.
При кратковременных режимах работы двигатель работает в течении рабочего периода, которого недостаточно для достижения установившегося значения. Время остановки т.е. время охлаждения достаточно для того чтобы двигатель охладился до температуры окружающей среды.
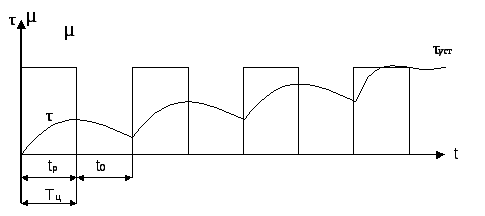
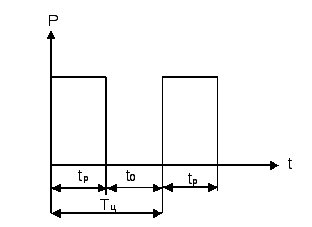
Повторно кратковременный режим работы - это режим, при котором рабочий период чередуется с периодом остановки и продолжительность цикла не превышает 10 мин. Этот режим характеризуется относительной продолжительностью включения, которая определяется.
![]()
Выбор мощности двигателя при длительном режиме работы:
1) при неизменной нагрузке. В этом случае номинальная мощность должна быть равна или несколько больше расчетной на 10-20%. В этом случае по каталогу выбирают двигатель с ближайшей расчетной мощностью.
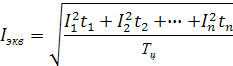
2) Выбор мощности при переменной нагрузке в этом случае используется метод эквивалентного тока.
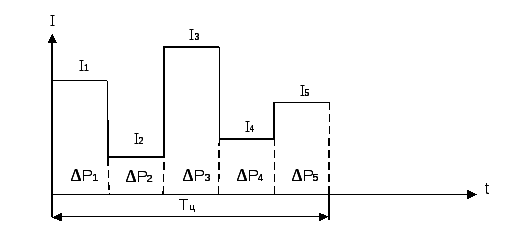
Пусть
двигатель работает по графику, каждому
значению тока соответствует определенное
значение потерь мощность. Полные потери
в двигателе состоят из потерь
![]() .
Переменные потери это потери в обмотках
якоря,
статора,
ротора, которые пропорциональны квадрату
тока и значению сопротивления
.
Переменные потери это потери в обмотках
якоря,
статора,
ротора, которые пропорциональны квадрату
тока и значению сопротивления
![]() с учетом того что время цикла
Tц=t1+t2+t3+…+tn.
с учетом того что время цикла
Tц=t1+t2+t3+…+tn.
![]() Tц=
Tц=![]()
Для ДТП независимого возбуждения при постоянном магнитном потоке момент пропорционален току.
Все эти формулы действительны для ЭП работающего со скоростью близкой к номинальной и принудительной вентиляции.
Выбор мощности при кратковременном и повторно кратковременном режимах. При кратковременном применении двигателя специально рассчитанные для такого режима работы. В этом случае по расчетной мощности и времени работы. В этом случае по расчетной мощности и времени работы двигателя выбирают по справочнику с условием:
![]()
Для двигателя с ПК режимом работы определяют расчетную мощность при одноступенчатом режиме и продолжительность включения.
![]()
При мощности нагрузки мощность определяется как эквивалентная.
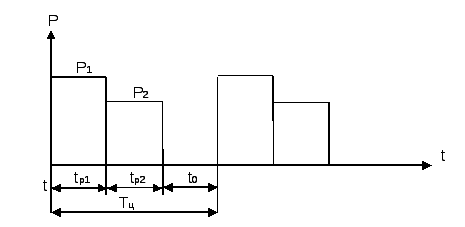
![]()
В этом случае, когда рассчитывается продолжительность включения и механизм обладает продолжительностью отключения отличной от стандартной необходимо произвести перерасчет мощности на действительно продолжительные включения: