

2.4 Выбор двигателя по нагреву. Нагрев и охлаждение двигателей.
Полагают, что двигатель, как однородное тело, имеет некоторую теплоемкость и коэффициент теплоотдачи. При этом уравнение теплового баланса
записывается в следующем виде: Qdt = Cdτ + Aτdt, (26)
где Q – потери теплоты, Дж/с; С – теплоемкость двигателя, Дж/К: А – коэффициент теплоотдачи, Дж/(с*К): τ – превышение температуры двигателя θд над температурой окружающей среды θ0, или так называемый перегрев, К; τ = θд – θ0.
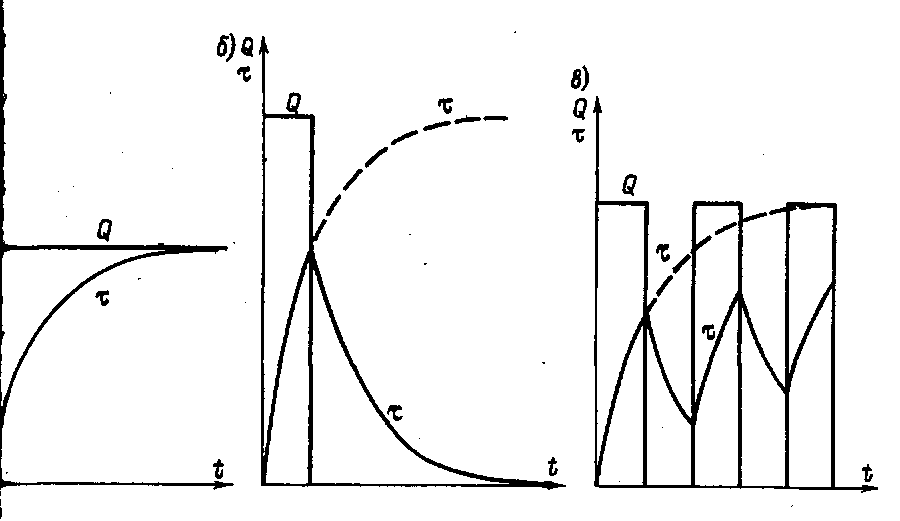
Превышение температуры двигателя над температурой окружающей среды изменяется согласно выражения τ = τу(1 – е-t/Тт) + τначе-t/Тт , (27)
где τу = Q/А – установившаяся температура, оС; Тт = С/А – тепловая постоянная времени двигателя, с. Как видно, температура изменяется по экспоненциальному
закону как при нагревании (рис.2.2), так и при охлаждении (рис.2.3).
Выражение для тепловой постоянной времени показывает, что ее значение в сильной степени определяется условиями вентиляции машины.
Для машин с обычной геометрией тепловая постоянная времени на три-четыре порядка выше электромеханической. Поэтому на переходные процессы, связанные с изменением скорости, тепловые процессы не оказывают влияния.
Выбор двигателя по нагреву.
В промышленных приводах для оценки правильности выбора двигателя приходится идти на использование более простых методов. При этом учитывается специфика работы привода, определяемая характером нагрузки. Рассматриваются три характерных режима: длительный, кратковременный и повторно-кратко- временный.
В длительном режиме продолжительность работы электропривода такова, что все части двигателя достигают установившейся температуры.
В кратковременном режиме, имеющем рабочий интервал и продолжительную паузу, длительность рабочего интервала недостаточна для того, чтобы двигатель достиг установившейся температуры, следующая затем пауза настолько велика, что двигатель успевает охладиться до температуры окружающей среды.
Повторно-кратковременный режим тоже содержит рабочие интервалы и паузы, когда двигатель отклю- чен, причем продолжительность рабочих интервалов
мала, так что двигательные может достигнуть установившейся температуры, а за время паузы не успевает охладиться до температуры окружающей среды. Этот
режим характеризуется относительной продолжительностью включения (ПВ):
ε = tраб/(tраб+ tпаузы). Обычно ε выражается в процентах.
Рисунок 2.3 – Кривые
изменения
температуры
1) Выбор мощности двигателя для длительного
режима работы.
Наиболее прост выбор двигателя для длительного режима работы с постоянной нагрузкой и скоростью. В этом случае номинальная мощность двигателя определяется непосредственно по средней статической мощности нагрузки с учетом потерь в механической передаче. Для выбора двигателя при работе в длительном режиме с переменной нагрузкой необходим предварительный выбор номинальной мощности по статической нагрузке с учетом коэффициента запаса, определяющего влияние динамических процессов на нагрев обмоток, а затем проверка правильности предварительного выбора по рассчитанным нагрузочным диаграммам, представляющим собой зависимости момента (тока, скорости) от времени.
2) При кратковременном режиме работы можно форсировать двигатель, заставляя его работать с большими нагрузками, с тем чтобы использовать его возможности. В кратковременном режиме двигатель, предназначенный для длительной работы, использоваться не может. Для кратковременного режима необходимы специальные двигатели. Это обусловлено двумя причинами. Во-первых, при форсировке снижаются перегрузочные возможности двигателя. Между тем дви-
гатель всегда должен преодолевать существенные перегрузки, хотя бы при пуске и торможении. Поэтому двигатель для кратковременного режима должен иметь большую перегрузочную способность. Во-вторых, использование двигателя для длительного режима в кратковременном нецелесообразно по энергетическим соображениям. В кратковременном режиме максимальный КПД должет быть при форсированных условиях работы. Следовательно, постоянные потери должны быть увеличены, а потери в меди снижены.
3) Идеализированный график повторно-кратковременного режима работы представлен на рис.2.3 Для повторно-кратковременного режима необходи-
мы специальные двигатели и дополнительно еще с улучшенными динамическими характеристиками, т.е. с пониженным моментом инерции и вытянутой формой ротора. Номинальная относительная продолжительность включения двигателя принимается 40%. При выборе мощности для реального графика нагрузки определяется эквивалентный момент (ток) и сравнивается с номинальным.
яние статической нагрузки, обозначим как ΔW , тогда ΔW = М (ω - ω)dt