

5.3 Системы подчиненного регулирования
В современных электроприводах преимущественно используется принцип последовательной коррекции, реализованный системах подчиненного регулирования.
Система подчиненного регулирования (СПР) – это система последовательного включения контуров регулирования, число которых равно числу регулируемых координат. Каждый контур имеет свой регулятор, на вход которого подается сигнал с предыдущего каскада и сигнал с выхода данного каскада, соответствующий фактическому значению координаты. Каждый предыдущий каскад является задающим органом для последующего. Контур регулирования должен, как правило, строиться так, чтобы иметь только одну большую постоянную времени.
Регулятор выбирается таким образом, чтобы при включении его последовательно в прямой канал контура, была скомпенсирована большая постоянная времени и взамен ее действовала существенно меньшая не скомпенсированная постоянная времени.
При последовательной коррекции структурная схема контура регулирования может быть представлена, как показано на рисунке 5.4.
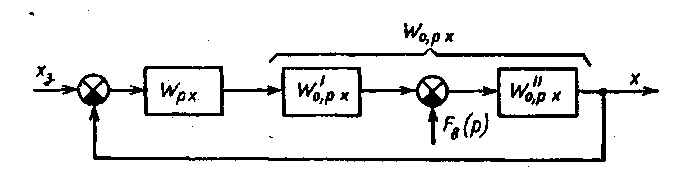
Рисунок 5.4 – Структурная схема замкнутого контура регулирования
Для того, чтобы при замыкании контура отрицательной обратной связью по регулируемой координате обеспечивались требуемая точность и динамические показатели качества регулирования, необходимо, чтобы ЛАЧХ разомкнутого контура имела вполне определенный вид и параметры. Общая форма желаемой ЛАЧХ разомкнутого контура представлена на рис. 5.5.
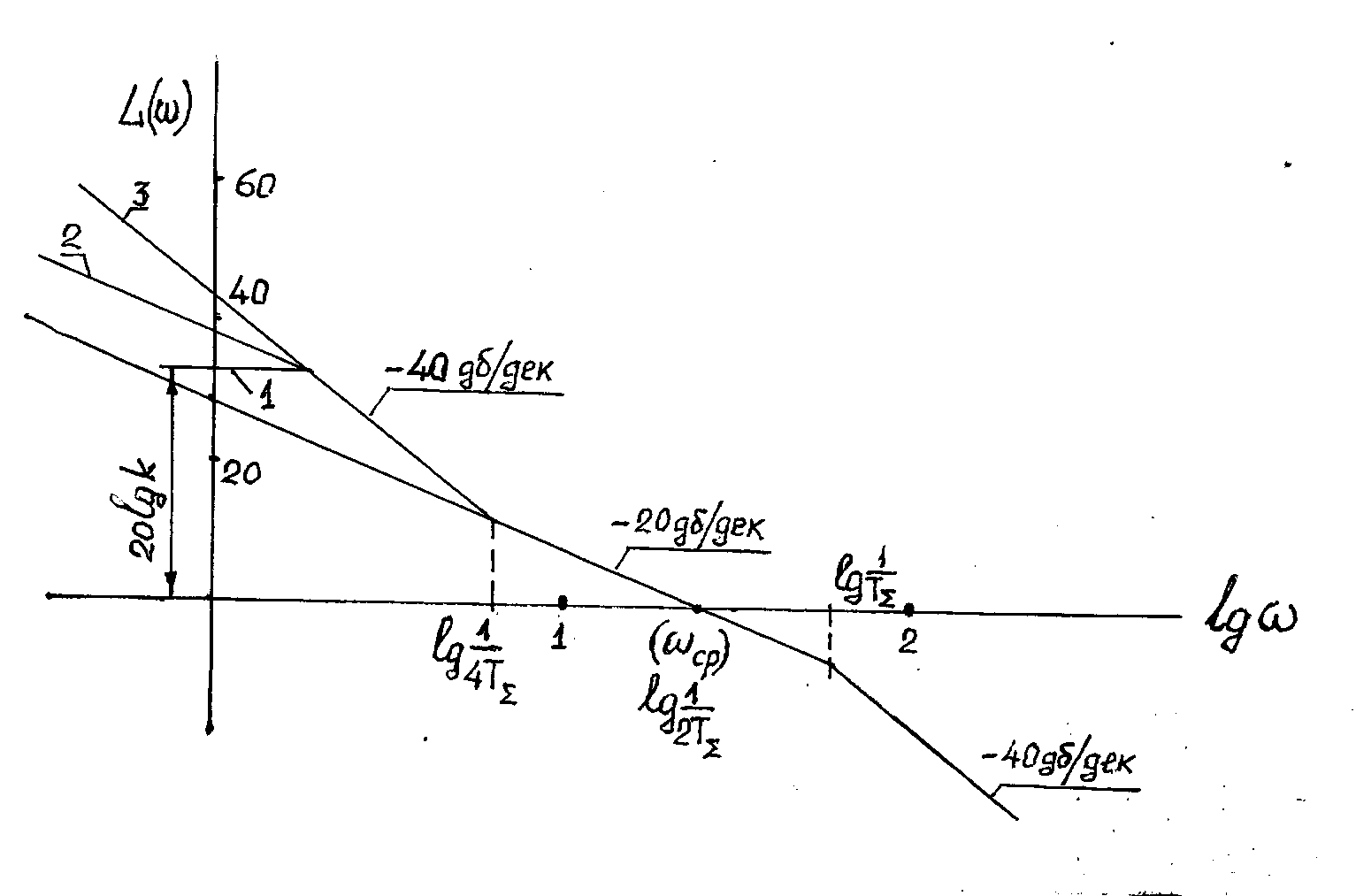
Рисунок 5.5 – Желаемые частотные характеристики разомкнутого контура регулирования.
Чтобы удовлетворить требованиям, предъявляемым к электроприводу в отношении точности регулирования координаты, необходимо сформировать низкочастотную область характеристики определенного вида. Эта область определяется коэффициентом усиления разомкнутого контура k и порядком астатизма системы; при его отсутствии система считается статической из-за наличия установившейся ошибки в системе.
Низкочастотная часть желаемой ЛАХ представлена на рисунке в виде участков характеристик 1,2,3. Нетрудно видеть, что повышение порядка астатизма увеличивает значения комплексного коэффициента усиления в низкочастотной части и динамическая точность регулирования возрастает тем в большей степени, чем в более широком диапазоне частот обеспечивается повышение амплитуд.
Динамические показатели качества регулирования определяются главным образом средне частотной зоной ЛАХ. Для получения достаточного запаса устойчивости необходимо, чтобы в районе частоты среза был достаточно протяженный участок ЛАХ с наклоном -20 дец/дек.
Ближайшая к ωср нижняя частота сопряжения ω1 = 1/4ТΣ : запас по фазе уменьшается и перерегулирование возрастает. Ближайшая к частоте среза верхняя частота сопряжения ω2 = 1/ТΣ и вся высокочастотная часть ЛАХ сказывается на начальном участке переходного процесса.
Многоконтурная система подчиненного регулирования
На рисунке 5. показана схема системы управления двигателем постоянного тока с независимым возбуждением. В схеме имеется четыре независимых контура: два в якорной цепи и два в цепи возбуждения. В якорной цепи контуры тока и скорости с соответствующими регуляторами РТЯ и РС, а в цепи возбуждения – контуры тока возбуждения и э.д.с. с регуляторами РТВ и РЭ.
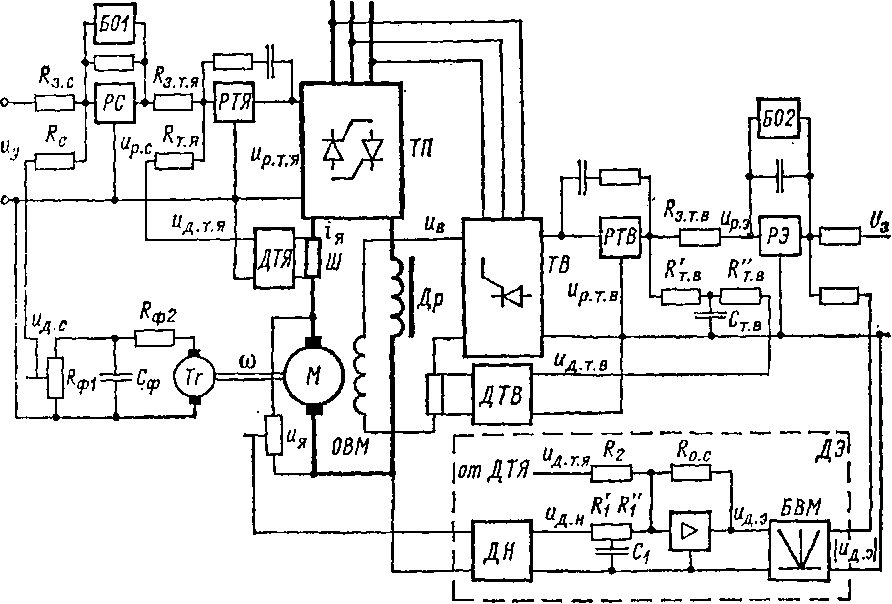
Рисунок 5. –Многоконтурная система подчиненного управления двигателем постоянного тока с независимым возбуждением.