

Основы управления в сложных системах Общие положения
Общую структурную схему системы с управлением можно представить в виде [1]:
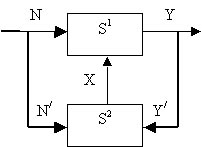
Рис. 2.2. Общая структурная схемы системы с управлением
Здесь S1 – объект управления,
S2 - управляющая система,
N - информация о состоянии внешней среды (внешнего воздействия на объект управления),
N′ - информация о состоянии внешней среды, имеющаяся в управляющей системе,
X - командная информация,
Y - информация о состоянии объекта управления,
Y′ - информация о состоянии объекта управления, имеющаяся в управляющей системе.
Управляющая система реализует задачи целеполагания, стабилизации, выполнения программы, слежения или оптимизации и тем самым обеспечивает либо удержание выходных характеристик системы при изменениях внешней среды в требуемых пределах, либо выполнение системой действий по изменению значений ее характеристик или характеристик внешней среды.
Объект управления является исполнительным инструментов, реализующим основную функцию системы.
Система связи, являясь частью системы управления, обеспечивает обмен информацией между управляющей системой и объектом управления.
Типы систем управления
Системы с управлением, называются разомкнутыми, так как в управляющих системах отсутствует информация о состоянии объекта управления.
Остальные системы называются замкнутыми.
Задача управления по программе реализуется в системах и заключается в жестком управлении заранее составленной и введенной в систему последовательности управляющих воздействий {xi}, заданных на весь период достижения цели Т.
Программный способ управления распространен в системах, на которые внешняя среда влияет несущественно.
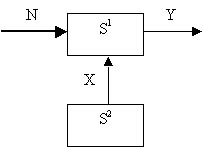
Программное управление
Для повышения эффективности управления при изменении внешней среды в разомкнутых системах используют способ, основанный на компенсации действия возмущений на управляемые объекты.
При управлении по возмущениям в системах управляющая система производит измерения возмущений и с их учетом формирует управляющие воздействия.
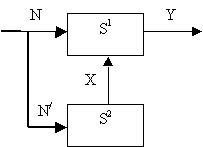
Управление по отклонению с неполной информацией
Этот принцип управления используется при планировании на предприятиях: при разработке планов учитывается, что производительность труда зависит от износа оборудования, от квалификации рабочих, смены и т. п., и при расчете времени на выполнение плановых заданий вводятся соответствующие корректировки в форме коэффициентов износа оборудования, коэффициентов сменности и т. п.
Поэтому управление по возмущению с неполной информацией приводит к накоплению ошибок.

Управление по состоянию с полной информацией
В остальных случаях применяется управление с обратной связью. Благодаря обратной связи в управляющей системе имеется информация о состоянии объекта управления.
В задачах стабилизации управление обеспечивает поддержание состояния в заданных пределах изменения значений выходных переменных. изменения состояния которой заранее не известны.
Комбинированное управление
Системами слежения являются средства радиоразведки, радиолокаторы, живые организмы, режим и глубина дыхания которых следует за изменениями физической нагрузки.
К недостаткам замкнутых систем следует отнести их усложнение за счет введения каналов обратной связи и наличие неустранимого отклонения между фактическим и требуемым состоянием управляемых объектов, обусловленного тем, что управляющее воздействие вырабатывается только с появлением отклонений.
Недостаточные возможности управления можно до некоторой степени компенсировать с помощью построения управляющей системы как иерархической многоцелевой структурированной системы.
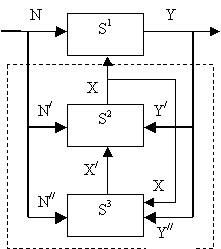
Иерархическое управление
Здесь обозначения S1, S2, N, N′, X, Y, Y′ соответствуют обозначениям на рисунке Х, S3- управляющая система более высокого уровня иерархии, N′′ -информация о состоянии внешней среды, находящаяся в управляющей системе S3, X – командная (управляющая) информация системы S2, имеющаяся в системе S3, X′ – командная информация системы S3, Y′′ -информация о состоянии объекта управления, содержащаяся в системе S3.
Наиболее часто иерархические системы
применяются там, где информация не
полностью соответствует реальному
состоянию среды и объекта управления
(![]() и
и
![]() ).
Где число переменных и диапазон их
значений велики, переменные могут быть
как качественными, так и количественным,
а их взаимодействия слабо формализованы
и изменяются с течением времени.
).
Где число переменных и диапазон их
значений велики, переменные могут быть
как качественными, так и количественным,
а их взаимодействия слабо формализованы
и изменяются с течением времени.
В таких системах управление не может ограничиться только функциями регулирования. Важную роль начинают играть процессы, связанные с контролем, анализом и другими функциями управления.
При этом управляющая система S2 решает задачи регулирования, как и в системах других типов. На систему S3 возлагаются остальные функции управления, не связанные непосредственно с регулированием. Например, целеполагание, планирование прогнозирование.
Состояния переменных Y представляют альтернативы, на которых определена функция полезности.
Цель системы заключается в максимизации функции полезности.
Важно отметить, что способы реализации рассмотренных принципов наиболее исследованы для управления в технических системах. А для социально-экономических систем эти принципы в большей мере используются как сущностные.