

4.5 Динамические характеристики эмм
4.5.1 Расчет динамических характеристик
Основными динамическими характеристиками ЭММ являются: время срабатывания Tcp и время отпускания Toт ЭММ.
Время срабатывания – промежуток времени между моментом подачи напряжения на катушку до момента полной остановки якоря.
Время отпускания – промежуток времени между моментом отключения питания катушки до момента полной остановки якоря.
И
время срабатывания и время отпускания
состоит из двух частей: 1)время трогания
 – время до начала движения якоря ;
– время до начала движения якоря ; 2) время движения
2) время движения
 – время от начала движения до остановки
якоря:
– время от начала движения до остановки
якоря:

 (5.17)
(5.17)
В
зависимости от величин
 и
и
 различают: быстродействующие ЭММ (до
50 мс), ЭММ с нормальным временем действия
(50…150 мс) и ЭММ замедленного действия(
свыше 150мс).
различают: быстродействующие ЭММ (до
50 мс), ЭММ с нормальным временем действия
(50…150 мс) и ЭММ замедленного действия(
свыше 150мс).
В случае ненасыщенного магнитопровода :
 ;
;
 ,
(5.18)
,
(5.18)
 и
и
 индуктивности катушки магнита при
опушенном и притянутом якоре соответственно
:
индуктивности катушки магнита при
опушенном и притянутом якоре соответственно
:
 ,
,
 , (5.19)
, (5.19)
где
W
- число витков обмотки;
 и
и
 - суммарное магнитное сопротивление
воздушных зазоров при опущенном и
притянутом якоре;
- суммарное магнитное сопротивление
воздушных зазоров при опущенном и
притянутом якоре; - сопротивление стали при притянутом
якоре;
- сопротивление стали при притянутом
якоре;
 – установившейся значение тока:
– установившейся значение тока:
 (5.20)
(5.20)
где
R
– активное сопротивление обмотки; U
– напряжение питания;
 и
и
 – ток срабатывания и отпускания.
– ток срабатывания и отпускания.
Величины
и
определяются из выражений (5.12) – (5.14) в
соответствии с типом ЭМ. При известных
величинах
 и
и
 ,
соответствующих началу движения якоря
при срабатывании и отпускании. Так из
(5.12) имеем:
,
соответствующих началу движения якоря
при срабатывании и отпускании. Так из
(5.12) имеем:
 ;
;

Из
(5.13):
 (5.20)
(5.20)
Из
(5.14):
Силы Fэ ср и Fэ от могут быть найдены по так называемым характеристикам противодействующих сил, которые будут рассмотрены ниже.
Точное определение tдв’ и tдв’’ задача сложная. Поэтому для нахождения tдв’ используется приближённая формула:
 (5.22)
(5.22)
где М – масса якоря и присоединяемых к нему элементов,
 – рабочий
воздушный зазор при отпущенном и
притянутом якоре,
– рабочий
воздушный зазор при отпущенном и
притянутом якоре,
S – площадь фигуры м/с характеристиками тяговых и противодействующих сил,
 -
масштабы по осям координат указанных
характеристик.
-
масштабы по осям координат указанных
характеристик.
Использую формулы (5.17-5.22) можно определить tср. В большинстве случаев величина tот имеет тот же порядок что и tср, поэтому для оценки качеств проектируемого реле её можно не находить.
4.5.2. Способы повышения быстродействия.
Способы повышения быстродействия разделяют на две группы: конструктивные и схемотехнические.
К конструктивным способам относят:
выбор такой конструкции магнитопровода и якоря, где бы потоки рассеяния также создавали силу притяжения;
выбор такого материала для магнитопровода с высоким электрическим сопротивлением;
увеличение напряжения питания и уменьшение активного сопротивления катушки магниты.
Схемотехнические способы обеспечивают форсированным режимом работы ЭМ, т.е. увеличение потребляемой мощности и силы притяжения в моменты срабатывания.
Наиболее используемые при этом схемы приведены на рисунке 5.7.
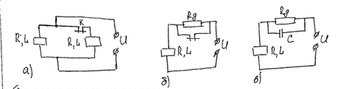
Рис. 5.7. Схемы повышения быстродействия ЭММ.
На рис а) изображена схема с двумя обмотками, одна из которых после срабатывания ЭМ отключается. На схеме б) контакт срабатывает когда замкнут и через катушку протекает ток. После срабатывания через катушку протекает меньший ток достаточный для удержания якоря в притянутом положении. Подобная схема, только с «автоматическим» контактом, роль которого выполняет конденсатор С изображена на схеме в).
При включении цикл при переходном процессе суммарное сопротивление Rд и С меньше чем в установившемся режиме. При полностью заряженном С ток протекает через Rэ (I=U/(R+Rд)). Оптимальное значение ёмкости, при котором tср минимальный:
 (5.23)
(5.23)
где L – индуктивность электромагнита [Г], С – ёмкость конденсатора [Ф].
Схемы б) и в) уменьшают tср только при условии повышения U (по сравнению со схемами без Rд), т.к. падение напряжения на Rд приводит с снижению сопротивления на обмотке ЭМ и, в результате, к повышению tср. Чтобы этого не произошло повышают U.