

9. Полярные координаты.
Полярная система координат — двумерная система координат, в которой каждая точка на плоскости определяется двумя числами — полярным углом и полярным радиусом.
Д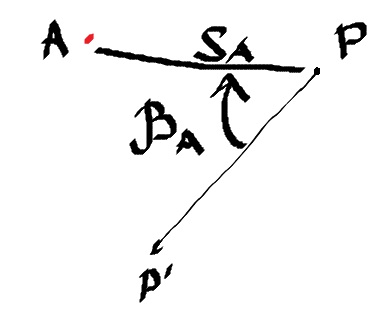 ля
полярной системы координат характерно
наличие полюса P, полярной
оси РР’ , полярного угла β между
направлением полярной оси и направлением
на определяемую точку, расстояния S
(горизонтального проложения - проекции
линии местности на горизонтальную
плоскость.) В математике горизонтальное
проложени называют радиусом –вектором.
Точка Р’ , как и полюс, является точкой
с известными координатами. То есть
полярная ось однозначно задана на
местности. Полярные углы отсчитывают
от полярной оси по движению часовой
стрелки или против него.
ля
полярной системы координат характерно
наличие полюса P, полярной
оси РР’ , полярного угла β между
направлением полярной оси и направлением
на определяемую точку, расстояния S
(горизонтального проложения - проекции
линии местности на горизонтальную
плоскость.) В математике горизонтальное
проложени называют радиусом –вектором.
Точка Р’ , как и полюс, является точкой
с известными координатами. То есть
полярная ось однозначно задана на
местности. Полярные углы отсчитывают
от полярной оси по движению часовой
стрелки или против него.
В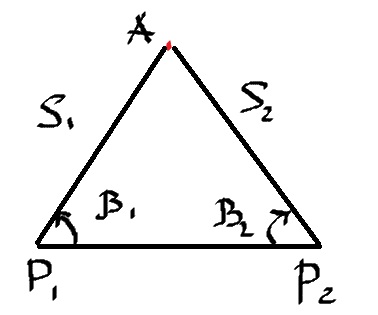 биполярной системе координат имеется
два полюса (Р1 и Р2), а положение
точки определяется значениями двух
горизонтальных полярных углов β1 и β2
(угловая засечка), либо значениями двух
измеренных горизонтальных проложений
S1 и S2
(линейная засечка). Надо заметить что
угол β1 отсчитывается против хода часовой
стрелки, а угол β2 по ходу часовой стрелки.
биполярной системе координат имеется
два полюса (Р1 и Р2), а положение
точки определяется значениями двух
горизонтальных полярных углов β1 и β2
(угловая засечка), либо значениями двух
измеренных горизонтальных проложений
S1 и S2
(линейная засечка). Надо заметить что
угол β1 отсчитывается против хода часовой
стрелки, а угол β2 по ходу часовой стрелки.
10. Связь прямоугольной и полярной систем координат (прямая и обратная геодезические задачи.)
Прямая геодезическая задача на плоскости
В геодезии есть две стандартные задачи: прямая геодезичеcкая задача на плоскости и обратная геодезическая задача на плоскости.
Прямая
геодезическая задача - это вычисление
координат X2, Y2 второго пункта, если
известны координаты X1, Y1 первого пункта,
дирекционный угол α и длина S линии,
соединяющей эти пункты.
![]()
Обратная геодезическая задача на плоскости
Обратная геодезическая задача - это вычисление дирекционного угла α и длины S линии, соединяющей два пункта с известными координатами X1, Y1 и X2
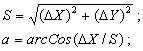
Построим на отрезке 1-2 как на гипотенузе прямоугольный треугольник с катетами, параллельными осям координат. В этом треугольнике гипотенуза равна S, катеты равны приращениям координат точек 1 и 2 ( ΔX = X2 - X1, ΔY = Y2 - Y1 ), а один из острых углов равен румбу r линии 1-2.
Если
Δ X ![]() 00
и Δ Y
00,
то решаем треугольник по известным
формулам:
00
и Δ Y
00,
то решаем треугольник по известным
формулам:
![]()
![]()
Для данного рисунка направление линии 1-2 находится во второй четверти, поэтому на основании (1.22) находим:
![]()
Общий порядок нахождения дирекционного угла линии 1-2 включает две операции:
- определение номера четверти по знакам приращений координат Δ>X и ΔY
- вычисление α по формулам в соответствии с номером четверти.
Контролем правильности вычислений является выполнение равенства:
![]() (2.12)
(2.12)
Если ΔX = 0.0 , то
S = іΔYі; и α = 90o 00' 00" при ΔY > 0 , α = 270o 00' 00" при ΔY < 0 .
Если ΔY = 0.0 , то
S = іΔXі и α = 0o 00' 00" при ΔX > 0 , α = 180o 00' 00" при ΔX < 0 .
Для решения обратной задачи в автоматическом режиме (в программах для ЭВМ) используется другой алгоритм, не содержащий тангенса угла и исключающий возможное деление на ноль:
 (2.13)
(2.13)
если ΔY => 0o , то α = a , если ΔY < 0o , то α = 360o - a.
11.Ориентирные углы направлений (азимут, дирекционный угол и румб).
Азимут - угол между направлением на север (в Южном полушарии — на юг) и направлением на какой-либо удалённый предмет. Отсчитывается обычно по часовой стрелке.
Румб – острый горизонтальный угол, отсчитываемый от ближайшего направления меридиана до данной линии. Румбы имеют значения от 0 до 90 градусов и сопровождаются названием четверти, в которой проходит линия.
В геодезии и топографии применяется также ориентирование линий относительно осевого меридиана. Угол отсчитываемый от северного направления меридиана до данного направления по ходу часовой стрелки, называется дирекционным углом.