

6.4.5. Построение желаемой лачх
Желаемая ЛАЧХ строится по требованиям к качеству работы замкнутой системы в статике и динамике.
Предварительно из условия заданной статической ошибки выбирается коэффициент усиления разомкнутой системы k, равный произведению коэффициентов усиления объекта и регулятора
|
(6.36) |
Поскольку статическая ошибка, в основном, определяется возмущением (см. раздел 5), рассмотрим эту составляющую для статической системы, соответствующую выражению (5.21)
При заданной ошибке
![]() расчетное
соотношение для
расчетное
соотношение для
![]() принимает
вид:
принимает
вид:
|
(6.37) |

Для астатических систем, работающих в режиме скоростной заводки, аналогичное расчетное соотношение может быть получено на основе выражения (5.19).
При синтезе систем
частотным методом удобно выровнять
ЛАЧХ объекта и ЛАЧХ разомкнутой системы,
полагая что на этапе расчета
![]() ,
а найденный коэффициент усиления отнесен
к объекту,
,
а найденный коэффициент усиления отнесен
к объекту,
![]() ,
и учтен при построении
.
,
и учтен при построении
.
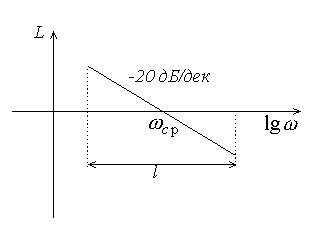
Наибольшее влияние на свойства замкнутой системы оказывает среднечастотная асимптота желаемой ЛАЧХ, которую выбирают по условиям динамики (рис.6.11).
Риc.6.11. Среднечастотная асимптота желаемой ЛАЧХ |
Для того, чтобы обеспечить устойчивой системы, ее наклон всегда должен быть равен -20 дБ/дек.
Частота среза
|
Соотношение между
![]() и
устанавливают
номограммы, приводимые в справочной
литературе. Для предварительных расчетов
можно пользоваться формулой:
и
устанавливают
номограммы, приводимые в справочной
литературе. Для предварительных расчетов
можно пользоваться формулой:
|
(6.38) |
 ,
где k
= (2
,
где k
= (2
Длина среднечастотного
участка желаемой ЛАЧХ решающим образом
определяет динамику и ограничивается
запасом устойчивости по модулю
![]() ,
который откладывается вверх и вниз по
оси ординат. В свою очередь,
находится
по номограммам в зависимости от требуемого
перерегулирования
,
который откладывается вверх и вниз по
оси ординат. В свою очередь,
находится
по номограммам в зависимости от требуемого
перерегулирования
![]() .
.
Приближенно длину
среднечастотного участка можно выбирать
следующим образом: l
= (1
1,5)
декады, вправо ивлево от
длина
асимптоты примерно 0,5l.
В этом случае будет обеспечено
перерегулирование
%
![]() (20
30)%
.
(20
30)%
.
Поскольку
![]() отнесен
к объекту, то в области низких частот
желаемая ЛАЧХ должна совпадать с ЛАЧХ
объекта; в области высоких частот эти
две характеристики могут совпадать или
быть параллельными. Таким образом,
остается выбрать только участки
сопряжения желаемой ЛАЧХ. Их следует
проводить под наклоном -40
или -60 дБ/дек
так, чтобы получить наиболее простое
корректирующее звено.
отнесен
к объекту, то в области низких частот
желаемая ЛАЧХ должна совпадать с ЛАЧХ
объекта; в области высоких частот эти
две характеристики могут совпадать или
быть параллельными. Таким образом,
остается выбрать только участки
сопряжения желаемой ЛАЧХ. Их следует
проводить под наклоном -40
или -60 дБ/дек
так, чтобы получить наиболее простое
корректирующее звено.
6.4.6. Расчет корректирующего звена
Асимптотическая ЛАЧХ корректирующего звена определяется в соответствии с основным соотношением частотного метода (6.35):
Затем по находится передаточная функция с помощью процедуры, обратной по отношению к порядку построения ЛАЧХ объекта, и предлагается схемная реализация корректирующего звена на активных или пассивных элементах.
Пример 6.4.
Пусть замкнутая нескорректированная система с объектом управления имеющим передаточную функцию вида
,
где k=10, T1=1, T2=0.1, имеет неудовлетворительные по качеству процессы .
Для объекта управления построена
логарифмическая характеристика а по
заданным требованиям к динамике и
статике (вид
импульсной характеристики) выбрана
![]() (рис.6.12).
(рис.6.12).
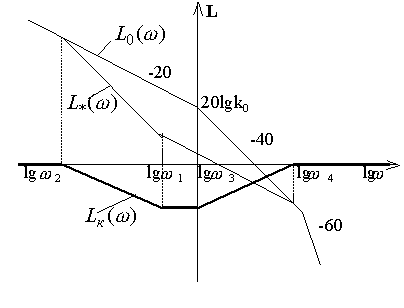
Рис.6.12. Иллюстрация частотного метода синтеза
![]() находится
графически как разность между желаемой,
,
и ЛАЧХ объекта. По ней восстанавливается
передаточная функция регулятора в виде:
находится
графически как разность между желаемой,
,
и ЛАЧХ объекта. По ней восстанавливается
передаточная функция регулятора в виде:
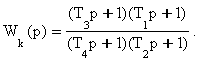
где
![]() соответствуют
точкам излома ЛАЧХ корректирующего
звена,
.
соответствуют
точкам излома ЛАЧХ корректирующего
звена,
.
Введение корректирующего звена в систему обеспечивает желаемый вид процессов на выходе замкнутой системы.
Схемная реализация звена, имеющего данную передаточную функцию, может быть представлена в виде цепочки последовательно соединенных интеграторов с прямыми и обратными связями. Для этого можно использовать приемы, описанные в разделе 3. Такое представление позволяет легко перейти к реализации корректирующего звена на активных элементах.