

- •ВВЕДЕНИЕ
- •1.1. Общие сведения по электрическим машинам
- •1.2. Классификация электрических машин
- •1.4. Принцип действия трансформатора
- •1.9. Принцип действия и устройство машины постоянного тока
- •2. ТРАНСФОРМАТОРЫ
- •2.1. Основные соотношения в трансформаторе
- •2.2. Виды трансформаторов и магнитопроводов
- •2.3. Типы и конструкция обмоток
- •2.4. Схемы и группы соединения трансформаторов
- •2.5. Расчет магнитной цепи, намагничивающий ток и ток холостого хода
- •2.6. Форма кривых намагничивающего тока и магнитного потока трансформатора
- •2.7. Уравнения напряжения и векторные диаграммы трансформатора
- •2.8. Схема замещения трансформатора
- •2.9. Опытное определение параметров схемы замещения
- •2.10. Энергетические диаграммы активной и реактивной мощностей трансформатора
- •2.11. Коэффициент полезного действия трансформатора. Зависимость КПД от нагрузки
- •2.12. Изменение вторичного напряжения при нагрузке. Внешняя характеристика трансформатора
- •2.13. Регулирование напряжения трансформатора
- •2.14. Параллельная работа трансформаторов
- •2.16. Включение ненагруженного трансформатора в сеть
- •2.17. Внезапное короткое замыкание
- •2.17. Перенапряжения в трансформаторах
- •3. РАЗНОВИДНОСТИ ТРАНСФОРМАТОРОВ
- •3.1. Автотрансформаторы
- •3.2. Трехобмоточный трансформатор
- •3.3. Измерительные трансформаторы тока и напряжения
- •3.4. Сварочные трансформаторы
- •3.5. Трансформаторы преобразовательных установок
- •4. ОБМОТКИ МАШИН ПЕРЕМЕННОГО ТОКА
- •4.2. Магнитодвижущие силы многофазных обмоток
- •4.3. Электродвижущие силы, индуцируемые в обмотках машин переменного тока
- •4.4. Схемы обмоток машин переменного тока
- •5. АСИНХРОННЫЕ МАШИНЫ
- •5.1. Асинхронная машина при неподвижном роторе
- •5.2. Фазорегуляторы и индукционные регуляторы напряжения
- •5.3. Работа асинхронной машины при вращающемся роторе
- •5.4. Схема замещения асинхронной машины
- •5.5. Расчет характеристик двигателей по схемам замещения
- •5.6. Механические характеристики
- •5.7. Влияние на механическую характеристику высших гармоник магнитного поля
- •5.8. Устойчивость работы асинхронного двигателя
- •5.9. Рабочие характеристики асинхронного двигателя
- •5.10. КПД и коэффициент мощности асинхронного двигателя
- •5.11. Пуск в ход трехфазных асинхронных двигателей
- •5.12. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом
- •5.14. Многоскоростные двигатели
- •5.15. Торможение двигателей
- •6. АСИНХРОННЫЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
- •6.1. Асинхронный автономный генератор
- •6.2. Однофазные асинхронные двигатели
- •6.3. Двухфазные управляемые асинхронные двигатели автоматических устройств
- •6.4. Асинхронный тахогенератор
- •6.5. Сельсины
- •6.6. Вращающиеся трансформаторы
- •7. СИНХРОННЫЕ МАШИНЫ
- •7.2. Характеристика холостого хода
- •7.3. Работа синхронного генератора при симметричной нагрузке
- •7.4. Математическая модель электромагнитных процессов в синхронном генераторе
- •7.5. Векторные диаграммы синхронных генераторов
- •7.6. Характеристики синхронных генераторов
- •7.7. Потери мощности и КПД синхронного генератора
- •7.8. Параллельная работа синхронных машин
- •7.9. Мощность и электромагнитный момент
- •7.10. Статическая устойчивость
- •7.12. Качания синхронных машин
- •7.13. Синхронные двигатели
- •7.14. Внезапное короткое замыкание синхронной машины
- •7.15. Несимметричные режимы работы синхронных генераторов
- •8. СИНХРОННЫЕ МАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
- •8.1. Назначение и особенности рабочего режима
- •8.4. Синхронные гистерезисные двигатели
- •9. МАШИНЫ ПОСТОЯННОГО ТОКА
- •9.1. Магнитная цепь машины и метод ее расчета
- •9.2. Основные электромагнитные соотношения в машине постоянного тока
- •9.3. Магнитное поле машины постоянного тока
- •9.4. Напряжение между коллекторными пластинами и компенсационная обмотка
- •9.5. Коммутация
- •9.6. Потери мощности. Коэффициент полезного действия электрической машины
- •9.7. Генераторный режим работы машины
- •9.8. Параллельная работа генераторов постоянного тока
- •9.9. Двигательный режим работы машины
- •9.10. Пуск и реверсирование двигателей постоянного тока
- •9.11. Устойчивость работы двигателей
- •9.12. Двигатели параллельного возбуждения
- •9.13. Двигатели последовательного возбуждения
- •10. СПЕЦИАЛЬНЫЕ МАШИНЫ ПОСТОЯННОГО ТОКА
- •10.1. Исполнительные двигатели постоянного тока
- •10.2. Тахогенераторы
- •10.3. Бесконтактные двигатели постоянного тока
- •ЗАКЛЮЧЕНИЕ
- •БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- •ОГЛАВЛЕНИЕ
5. Асинхронные машины
|
|
|
|
|
|
|
В ряде случаев при пуске |
||||
|
|
|
0 |
|
|
|
|||||
|
|
|
|
|
|
двигателей с фазным ротором в |
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
цепь |
ротора |
последовательно |
|||
|
|
|
|
|
|
Φ0 |
|||||
|
|
ψ2 |
|
|
|
|
или параллельно включают ин- |
||||
|
|
ψ |
2′ |
|
|
дуктивное сопротивление (реак- |
|||||
|
|
|
|
I2пa |
|
||||||
I2п |
|
|
|
|
тор). Он выполняет роль автома- |
||||||
[R = 0] |
I2′п |
|
I2′пa |
|
тического регулятора тока рото- |
||||||
д |
|
|
|
|
|
ра. В начальный момент пуска, |
|||||
|
|
[Rд > 0] |
|
|
|
|
когда |
частота |
тока |
в |
роторе |
|
|
E |
= E |
′ |
f2 = f1, |
индуктивное сопротивле- |
|||||
|
|
|
|||||||||
|
|
|
1 |
|
2 |
ние реактора велико и ограни- |
|||||
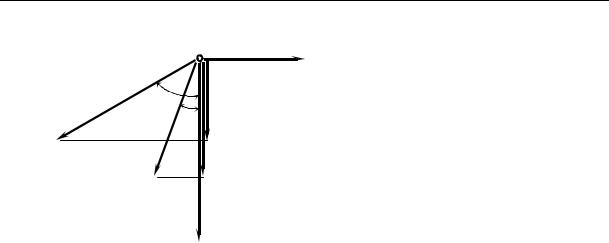
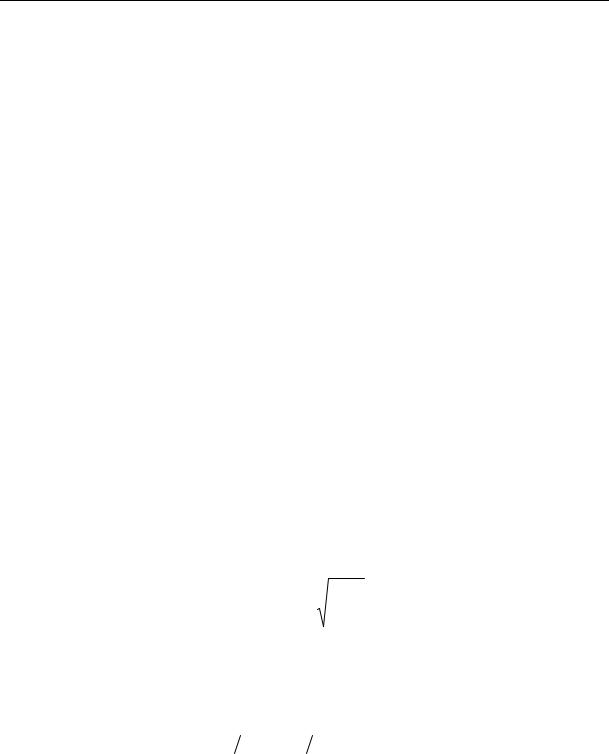
Рис. 5.31. Векторная диаграмма токов |
чивает величину пускового тока. |
||||||||||
|
ротора при реостатном пуске |
По мере разгона ротора умень- |
|||||||||
|
|
|
|
|
|
|
шается |
его ЭДС E2s, |
но |
одно- |
|
временно уменьшаются частота и результирующее индуктивное сопротивление X2s цепи ротора, в результате чего ток ротора уменьшается медленнее, чем при включении пускового реостата без реактора. При уменьшении индуктивного сопротивления реактора возрастает cos ψ2. Электромагнитный момент M = cмФm cos ψ2 при этих условиях также изменяется медленнее и в начале разгона его значение может быть выше, чем без реактора.
5.12. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом
Для достижения высоких значений КПД асинхронные двигатели проектируют с малыми величинами скольжения (s = 0,01−0,03), что возможно при малых значениях активного сопротивления роторной обмотки. Но в этом случае у двигателя невысокий пусковой момент (ниже номинального момента), что затрудняет применение прямого пуска. Возникает задача создания асинхронных двигателей с короткозамкнутым ротором, у которых активное сопротивление обмотки ротора при пуске достаточно велико и уменьшается с возрастанием частоты вращения ротора. Эту задачу решают, используя эффект вытеснения тока в обмотке ротора, применяя роторные обмотки специальной конструкции. Такие двигатели получили название двигателей с повышенным пусковым моментом.
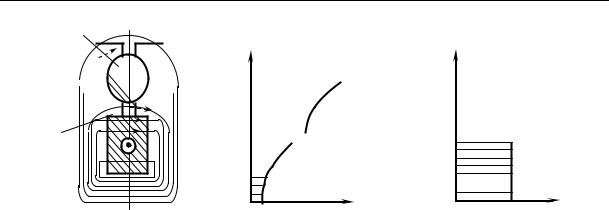
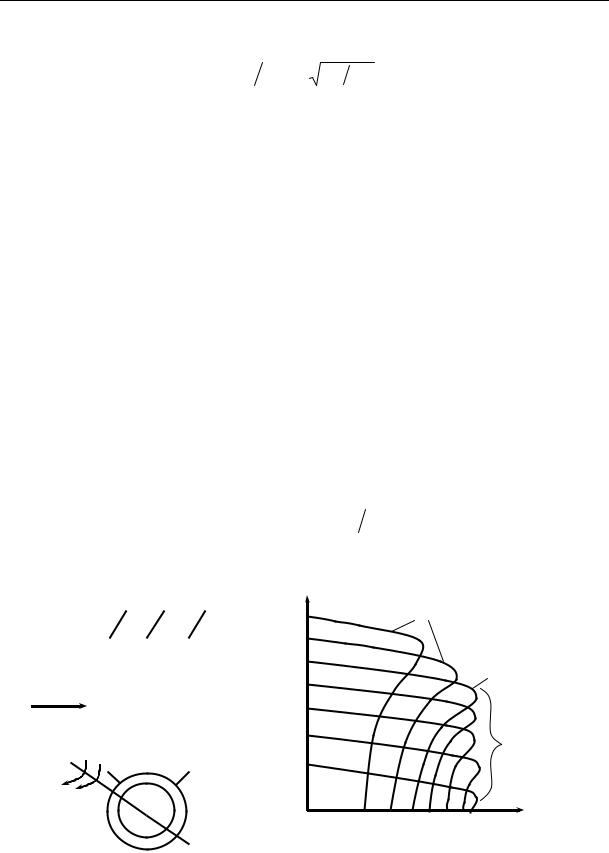
Одной из разновидностей таких конструкций является изобретенный М. О. Доливо-Добровольским асинхронный двигатель с двухклеточным ротором, имеющим две электрически связанные или несвязанные обмотки: рабочую – расположенную глубже в теле ротора – и пусковую, помещенную ближе к периферии (рис. 5.32, а).
232
5. Асинхронные машины
2
Φ2σ 
1 |
h Пуск |
|
|
|
|
h Работа |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
J |
|
а |
б |
в |
Рис. 5.32. Разрез паза (а) ротора с двойной беличьей клеткой и распределение (б, в) плотности тока по высоте паза h
Магнитная проводимость в зоне рабочей обмотки лучше, чем в зоне пусковой, а потоки рассеяния ее больше (проводимость в зоне пусковой обмотки искусственно понижают открытием паза, а поток рассеяния ее таким образом уменьшают). Пусковую обмотку выполняют из материалов
сбольшим удельным сопротивлением: латуни, алюминиевой бронзы и т. д.,
арабочую обмотку − из меди.
Вмомент включения двигателя частота тока в его роторной обмотке
f2 = f1. Обе обмотки в электрическом отношении включены параллельно, вследствие чего ток распределяется между рабочей и пусковой обмотками обратно пропорционально их полным сопротивлениям. Так как у рабочей обмотки весьма большое индуктивное сопротивление, то и ее полное сопротивление в несколько раз больше полного сопротивления пусковой обмотки, собственное индуктивное сопротивление которой чрезвычайно мало. Ток рабочей обмотки в этом случае заметно меньше тока пусковой обмотки. Вследствие большого индуктивного сопротивления рассеяния рабочей обмотки ток в ней отстает на большой угол от ЭДС, индуктированной потоком взаимоиндукции, и, соответственно, эта обмотка создает при пуске относительно малый пусковой момент. Наоборот, ток пусковой обмотки при пуске не только значителен по величине, но вследствие ничтожного индуктивного и большого активного сопротивления этой обмотки он почти совпадает по фазе с ЭДС взаимоиндукции, в результате чего эта обмотка создает весьма большой вращающий момент.
По мере разгона ротора уменьшается скольжение и частота f2 = f1s, снижается индуктивное сопротивление рабочей обмотки. По окончании процесса разгона значение скольжения становится малым и роль реактивных сопротивлений в токораспределении оказывается незначительной. Распределение токов в обмотках ротора определяется соотношением
233
5. Асинхронные машины
I2п I2р ≈ R2р R2п , |
(5.136) |
и ток проходит в основном по рабочей обмотке ротора, у которой R2p < R2п. Таким образом в двухклеточном роторе ток в начальный момент пуска вытесняется в наружную пусковую обмотку, создающую большой пусковой момент, а по окончании процесса пуска протекает по рабочей обмотке
смалым активным сопротивлением, вследствие чего двигатель работает
свысоким КПД. С целью упрощения технологии производства двухклеточные двигатели выполняют с электрически связанными литыми алюминиевыми обмотками. Уменьшения реактивного сопротивления пусковой обмотки такого ротора достигают за счет увеличения раскрытия паза, а повышенное значение активного сопротивления получают, уменьшая сечение пусковой обмотки.
Другой разновидностью двигателя с повышенным пусковым моментом является глубокопазный двигатель, принцип которого также основан на явлении вытеснения тока.
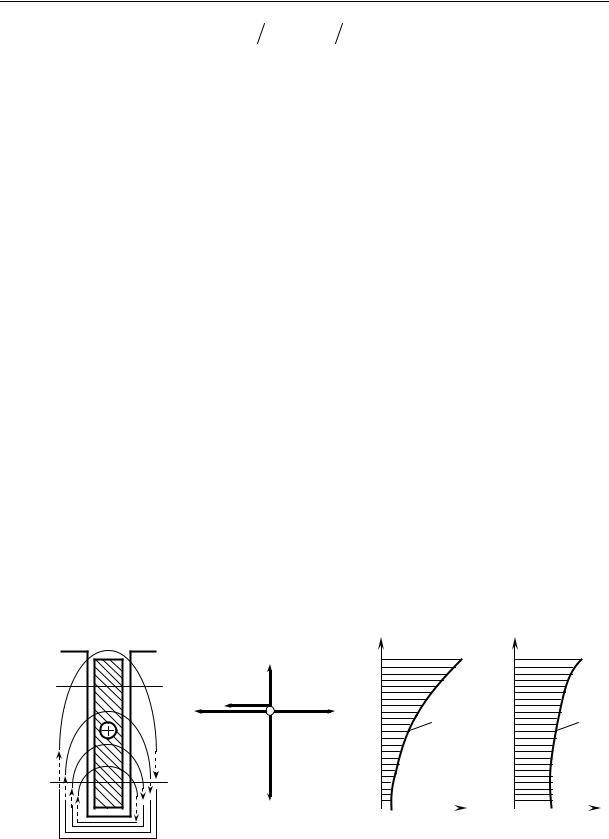
Обмотка глубокопазного ротора работает в период пуска как переменное сопротивление, автоматически уменьшающееся по мере увеличения частоты вращения ротора. На рис. 5.33, а представлена наиболее вероятная картина распределения магнитного потока рассеяния паза ротора.
Из нее видно, что потокосцепление волокон, лежащих ближе к дну
паза (участок 1′−1′), больше потокосцепления волокон, расположенных ближе к поверхности паза (участок 2′−2′). Соответственно в нижерасположенных волокнах наводится большая ЭДС рассеяния, в вышерасположенных – меньшая.
2′ |
2′ |
Е2σ |
h |
Пуск |
h |
Работа |
|
|
|
|
|
||
|
|
Φ2σ |
|
|
|
|
|
|
|
Φ0 |
1 |
|
2 |
Φ2σ |
|
|
|
|
||
|
|
I2 |
|
|
|
|
′ |
′ |
|
|
|
|
|
1 |
1 |
Е2 |
|
J |
|
J |
|
|
|
|
|||
|
|
|
|
|
|
|
а |
|
б |
|
|
в |
|
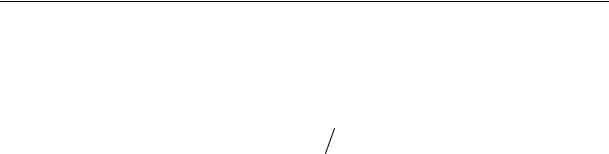
Рис. 5.33. Паз (а) глубокопазного ротора, диаграмма ЭДС и распределение плотностей тока (в) по высоте паза h
234
5. Асинхронные машины
Это |
особенно |
заметно |
|
|
М Мн |
|
|
|
|||
при неподвижном роторе, когда |
|
|
|
|
|
||||||
2,5 |
|
|
|
|
|
|
|
|
|||
частота тока в его цепи равна |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||||
частоте тока в статоре. Диа- |
2,0 |
|
|
|
|
|
|
|
|
||
грамма рис. 5.33, б показывает |
1,5 |
|
|
|
|
1 |
2 |
3 |
|
||
противодействие ЭДС |
рассея- |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||
ния E2σ основной ЭДС E2, пре- |
1,0 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||
пятствующее прохождению то- |
0,5 |
|
|
|
|
|
|
|
s |
||
ка I2 и вытесняющее его в |
|
|
|
|
|
|
|
||||
верхнюю часть паза. Происхо- |
|
|
|
|
|
|
|
|
|
||
|
0 0,2 |
0,4 0,6 0,8 |
1,0 |
|
|
||||||
дит как бы уменьшение сече- |
|
|
|
|
|
|
|
|
|
||
ния проводника и, как следст- |
|
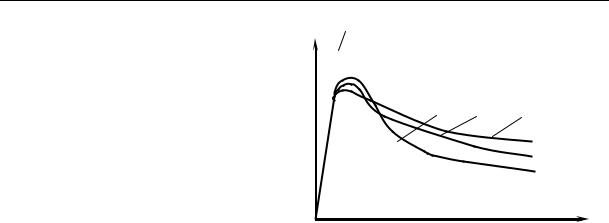
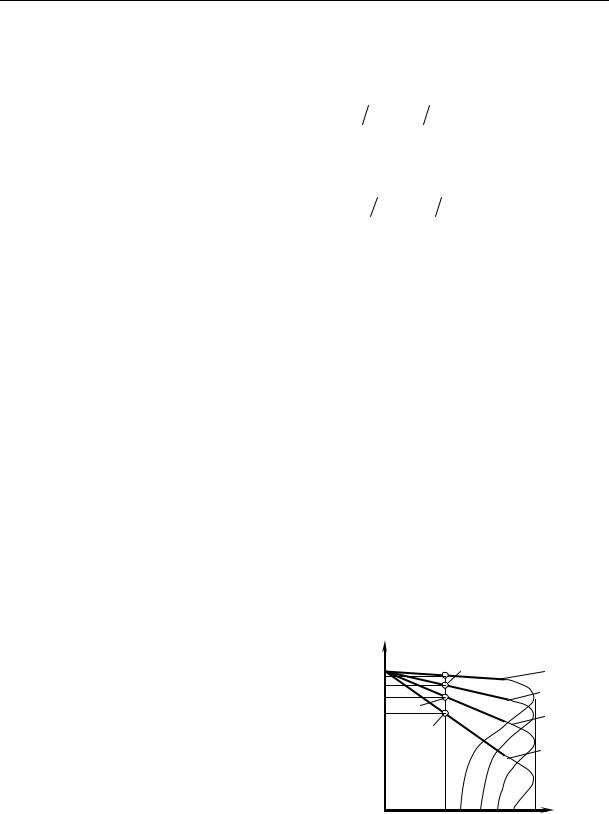
Рис. 5.34. Характеристики двигателей |
|||||||||
вие этого, |
увеличение |
его ак- |
|
|
с различными обмотками роторов |
||||||
тивного сопротивления при одновременном уменьшении индуктивного (потокосцепление действующей
части сечения меньше, чем всего проводника). Рост активного сопротивления снижает пусковой ток и увеличивает пусковой момент.
По мере увеличения частоты вращения ротора частота тока в нем уменьшается, эффект вытеснения слабеет. Чем ближе к синхронной становится частота вращения ротора, тем больше выравнивается кривая 1 распределения тока по высоте паза (рис. 5.33, в) до кривой 2 в конце пуска.
Зависимости M = f (s) двигателей с различными конструкциями обмоток ротора приведены на рис. 5.34 (кривая 1 для двигателя с обычной короткозамкнутой обмоткой, кривая 2 для двигателя с глубокопазным ротором, кривая 3 для двигателя с двухклеточным ротором).
Наибольший пусковой момент получают в двигателе с двухклеточным ротором. Кратность пускового момента для него Mп/Mн = 1,3–1,7 при кратности пускового тока Iп/Iн = 4,5–6. За счет большей величины потока рассеяния в роторной обмотке коэффициент мощности и КПД двигателей с повышенным пусковым моментом несколько ниже, чем двигателей нормального исполнения.
5.13. Регулирование частоты вращения асинхронных двигателей
Как следует из выражения (1.5), частота вращения ротора асинхронной машины
n = n (1 − s) = |
f |
(1 − s) . |
(5.137) |
|
|||
1 |
p |
|
|
|
|
|
235

5. Асинхронные машины
Способы регулирования частоты вращения асинхронных двигателей, согласно выражению (5.137), можно подразделить на два класса:
1) регулирование частоты вращения магнитного поля статора
n1 = f1 p , |
(5.138) |
что достигается либо регулированием частоты питающего напряжения, либо изменением числа пар полюсов;
2) изменение скольжения двигателя s при n1 = const, что поясняется следующим: при постоянном моменте на валу, как следует из формулы (5.87), скольжение есть функция напряжения и сопротивлений роторной обмотки R2, X2. Отсюда этот класс регулирования возможно реализовать либо изменением величины подаваемого на двигатель напряжения, либо (для двигателя с фазным ротором) введением в цепь ротора добавочных
сопротивлений R2D, X2D.
При изменении частоты напряжения или числа пар полюсов КПД двигателя остается высоким. При изменении питающего напряжения или введении в цепь ротора добавочного активного сопротивления КПД снижается тем больше, чем больше s, так как при этом мощность скольжения по выражению (5.74) теряется во вторичной цепи двигателя.
Рs = sPэм . |
(5.139) |
Изменение добавочного индуктивного сопротивления осуществляют подключением обмотки ротора к добавочному источнику электрической энергии (добавочной ЭДС E2 D = − jX 2 D I2 ). В этом случае мощность
скольжения sPэм в основном поступает от этого источника и в цепи ротора теряется только мощность m2 R2 I22 .
Сложность способа регулирования заключается в необходимости автоматического изменения частоты добавочной ЭДС при изменении частоты вращения. Этот способ применяют достаточно редко.
При регулировании частоты вращения асинхронного двигателя необходимо учитывать, что при изменении частоты вращения меняются условия охлаждения статора и ротора. Это проявляется особенно сильно в самовентилируемых двигателях, длительная мощность которых снижается при уменьшении частоты вращения.
Частотный способ является одним из наиболее перспективных и широко используемых в настоящее время способов регулирования частоты вращения наиболее надежных и дешевых асинхронных двигателей с короткозамкнутым ротором. Он обеспечивает плавное регулирование частоты вращения в широком диапазоне с высокой жесткостью получаемых характеристик.
236
5. Асинхронные машины
Для лучшего использования асинхронного двигателя одновременно с изменением частоты питающего напряжения необходимо изменять и величину этого напряжения.
При выборе соотношения между частотой и напряжением, подводимым к статору асинхронного двигателя, исходят из условия сохранения перегрузочной способности, т. е. отношения максимального (критического) момента двигателя Мкр к моменту нагрузки Мс. Если пренебречь активным сопротивлением статора и учесть, что Xк ~ f1 и ω1 ~ f1, то согласно формуле (5.92)
Мкр |
|
3U 2 |
|
= A |
U 2 |
|
|
|
||
|
|
= |
1 |
|
1 |
|
= const , |
(5.140) |
||
М |
|
|
|
f 2M |
|
|||||
с |
|
2ω X |
M |
с |
|
с |
|
|||
|
|
1 к |
|
|
1 |
|
||||
где А − постоянная, не зависящая от f1.
Следовательно, для любых двух значений частоты f1i и f1k необходимо соблюдать следующее соотношение:
U 2 |
|
U 2 |
|
|
1i |
= |
1k |
, |
(5.141) |
|
|
|||
f12i M сi |
f12k M сk |
|
||
где Mci, Mck – моменты нагрузки при частотах вращения асинхронного двигателя, соответствующих частотам f1i и f1k.
Основной закон изменения напряжения при частотном способе регулирования частоты вращения асинхронного двигателя
U1i |
= |
f1i |
|
M сi |
. |
(5.142) |
|
f1k |
|
||||
U1k |
|
M сk |
|
|||
Этот закон впервые сформулирован академиком М. П. Костенко. Если требуется регулировать частоту вращения при постоянном на-
грузочном моменте (Mc = const), то уравнение (5.142) принимает вид
U1i f1i =U1k f1k = const . |
(5.143) |
Если требуется поддерживать режим постоянной мощности электродвигателя Р2 = MнΩ = const, то, приняв частоту вращения ротора Ω приблизительно пропорциональной частоте f1, получим условие
M нi f1i = M нk f1k |
(5.144) |
237
5. Асинхронные машины
или с учетом выражения (5.142)
U1i U1k = f1i f1k . |
(5.145) |
На рис. 5.35, а приведена схема частотного регулирования частоты вращения асинхронного двигателя, а на рис. 5.35, б показаны механические характеристики двигателя при выполнении соотношения (5.143),
а также U1 = const при f1 > f1н.
Для частот ниже номинальной (f1 < f1н) критический момент двигателя постоянен, что обеспечивает неизменную перегрузочную способность двигателя. При частотах выше номинальной (f1 > f1н), когда по техническим условиям напряжение не может быть выше номинального (вследствие высокого насыщения магнитопровода или опасности быстрого старения изоляции при повышении напряжения на обмотке статора), критический момент уменьшается.
На малых частотах пренебрежениеактивнымсопротивлением статорной обмотки при выводе основного закона регулирования напряжения заметно отражается на характеристиках электропривода. В этом случае частотное регулированиедвигателяосуществляютпозаконупостоянствамагнитногопотока.
Как следует из формулы (5.44) и рис. 5.11, а, электромагнитный момент при заданной частоте тока в роторе пропорционален квадрату магнитного потока:
|
|
|
M = c Φ |
m |
I |
2 |
cos ψ |
2 |
= с Φ |
m |
E |
2s |
R |
(R2 |
+ X 2 |
) = CΦ2 . |
(5.146) |
|||||||||
|
|
|
|
|
|
|
м |
|
|
|
|
|
м |
|
2 |
2 |
2s |
m |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
U1 =Uн, f1 = var |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n2 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1н |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
U упр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
U = var, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
f1 = var |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= const |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M |
|
|
|
|
|
|
|
|
|
U рег , fрег |
|
|
|
|
|
|
|
f1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
n |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
M |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
||||
|
|
|
|
|
|
Рис. 5.35. Схема регулирования (а) и механические |
|
|||||||||||||||||||
|
|
|
|
характеристики двигателя(б) при частотном управлении |
|
|||||||||||||||||||||
238
5. Асинхронные машины
Значит, для поддержания максимального момента неизменным требуется иметь постоянный поток, т. е. при регулировании частоты должно соблюдаться условие Е1/f1 = const. Для обеспечения неизменного магнитного потока питающее напряжение U1 изменяют по условию
|
U |
1 |
− R I |
− jX I |
|
f = const . |
(5.147) |
||
|
|
||||||||
|
|
1 |
1 |
1 |
1 |
|
1 |
|
|
Необходимым элементом частотного электропривода является преобразователь частоты (и напряжения), на вход которого подается стандартное напряжение сети U1 (220, 380 В и т. д.) промышленной частоты f1 = 50 Гц, а с выхода снимается переменное напряжение Uрег регулируемой частоты fрег. Входная частота и напряжение регулируются с помощью управляющего сигнала, изменение которого в конечном счете влияет на величину частоты вращения двигателя. В состав преобразователя входят следующие элементы: входной фильтр, служащий для уменьшения пульсаций тока питающей сети постоянного тока; регулятор напряжения, позволяющий изменять напряжение на обмотках статора асинхронного двигателя в соответствии с выбранным законом регулирования при изменении частоты; собственно преобразователь частоты (инвертор), поочередно подключающий фазы обмотки статора двигателя к шинам разной полярности. Современные преобразователи частоты выполняют на основе транзисторов (в двигателях большой мощности – тиристоров), работающих в режиме ключей.
Особенностямиработычастотно-регулируемогодвигателяявляются:
•несинусоидальность питающего напряжения и вызываемые ею высшие временные гармоники магнитного поля, порождающие повышенные потери мощности, шумы и вибрации, дополнительный нагрев обмоток
имагнитопровода;
•работа в переходных режимах (как основной режим работы частотноуправляемых двигателей), требующая повышения быстродействия двигателя, что возможно при снижении момента инерции ротора за счет уменьшения его диаметра при увеличении активной длины машины;
•применение независимой вентиляции в машине, поскольку при снижении частоты вращения и при достаточно высокой степени загрузки самовентиляция оказывается неэффективной.
Уменьшения влияния несинусоидальности добиваются увеличением воздушного зазора. Кроме того, при повышенном зазоре уменьшаются потери мощности, возможно увеличение насыщения зубцов статора, что вле-
чет уменьшение активного сопротивления R1 и, как следствие, увеличение максимального момента.
Регулирование частоты вращения изменением активного сопротив-
ления роторной цепи возможно лишь в двигателях с фазным ротором
239
5. Асинхронные машины
и только вниз от номинальной скорости. Схема регулирования аналогична схеме пуска (рис. 5.29, а). Различие состоит лишь в том, что добавочные сопротивления при пуске выбирают для кратковременной работы (с повышенными плотностями тока, что уменьшает их массу и габариты), а при регулировании частоты вращения сопротивления выполняют для длительной работы.
Пусть асинхронный двигатель работает от сети с напряжением U1 = const и моментом на валу M2 = const, развивая частоту вращения n при закороченной цепи ротора (на рис. 5.36, а подвижный контакт добавочного сопротивления (реостата) находится в положении 1).
Введем в цепь ротора добавочное сопротивление, передвинув подвижный контакт в положение 2 (рис. 5.36, а). Ток ротора I2 = c/R2 снизится до некоторого меньшего значения (рис. 5.36, б), а частота вращения и ЭДС скольжения E2s = sE20 на некоторый малый промежуток времени останутся неизменными (вследствие инертности вращающейся массы ротора). Уменьшение тока приведет к уменьшению электромагнитного момента M = cмI2Ф. Тормозной момент M2, оставшийся тем же, превзойдет движущий (электромагнитный), и ротор начнет затормаживаться (уменьшать частоту вращения).
При уменьшении частоты вращения возрастут скольжение s и ЭДС E2s = sE20, вновь увеличивая ток I2. Переходный процесс будет продолжаться до тех пор, пока при некоторой частоте вращения n ток ротора не достигнет своего прежнего значения, которое было до регулирования. Останется прежней и мощность, подведенная к двигателю, так как при U1 = const она пропорциональна току I1, а ток I1 = I0 − I2′ сохраняет преж-
нее значение.
1 |
2 |
|
I2, R2,n |
R2′ |
|||
I2 |
|
|
|
||
R2 |
|
||||
n |
|
|
|
|
I2′ |
|
|
|
|
||
|
|
|
|
||
|
|
|
|
|
n′ |
|
t0 |
t |
|||
а |
б |
Рис. 5.36. Схема двигателя (а) и графики переходного процесса при изменении активного сопротивления роторной цепи (б)
240
5. Асинхронные машины
Мощность на валу двигателя Р2 = М2Ω, а вместе с нею и КПД уменьшаются за счет снижения скорости.
Если до регулирования частоты вращения мощность на валу и КПД
Р2 = М2Ω = М2πn , η= P2 P1 = c n P1 , |
(5.148) |
то после регулирования мощность на валу и КПД изменились до значений
′ |
′ |
′ |
′ ′ |
P1 = c n |
′ |
P1 . |
(5.149) |
Р2 |
= М2Ω = М2 |
2πn |
, η = P2 |
|
Значит, и КПД установки уменьшается пропорционально снижению частоты вращения:
′ |
′ |
|
n |
(5.150) |
|
η = η n . |
||
Из соотношения (5.150) следует, что регулирование частоты вращения изменением сопротивления роторной цепи неэкономично, но в силу своей простоты и плавности применяется широко, главным образом в различных крановых механизмах при мощностях выше 15 кВт.
Величину добавочного сопротивления в функции скольжения при постоянном моменте на валу нетрудно определить из уравнения
|
s = |
pэл2 |
= |
m1(r2′ + rд′ )(I2′ )2 |
. |
(5.151) |
||||
|
|
|
||||||||
|
|
P |
|
|
|
P |
|
|
||
На рис. 5.37 представлены механические характеристики n = f (M) |
||||||||||
с разными добавочными сопротивлениями в роторе: |
|
|
||||||||
1 – естественная |
характеристика |
n |
|
|
||||||
при R2д = 0; |
|
|
|
|
|
|
а б |
1 |
|
|
2, 3, 4 – искусственные характери- |
|
|
||||||||
|
|
2 |
|
|||||||
стики при возрастающих добавочных |
|
в |
|
|||||||
|
3 |
|
||||||||
|
|
|||||||||
|
|
|||||||||
сопротивлениях R2д. |
|
|
|
|
|
|
г |
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
При одном и том же моменте на |
|
|
4 |
|
||||||
валу (например, номинальном Mн) дви- |
|
|
|
|
||||||
гатель работает при разных |
частотах |
|
|
М |
||||||
вращения: nа, nб, nв, nг. |
|
|
|
|
|
|
|
|||
этого |
|
способа |
|
|
|
|
||||
Преимуществами |
|
Рис. 5.37. Механические |
||||||||
регулирования частоты вращения явля- |
||||||||||
характеристики при изменении |
||||||||||
ется сохранение перегрузочной способ- |
активного сопротивления |
|||||||||
ности двигателя (максимальный момент |
|
в цепи ротора |
|
|
||||||
241

5. Асинхронные машины
двигателя не зависит от активного сопротивления ротора) и повышение коэффициента мощности установки.
К недостаткам способа следует также отнести мягкость механических характеристик и зависимость диапазона регулирования от нагрузки. В частности, регулированиечастотывращениянахолостомходуневозможно.
Регулирование частоты вращения изменением величины питающего напряжения U1 осуществляют с помощью автотрансформаторов, реакторов насыщения, тиристорных регуляторов. Практическое значение для регулирования имеет уменьшение напряжения, так как существенное его увеличение приводит к недопустимому возрастанию тока холостого хода и сокращает срок службы изоляции.
Пусть двигатель работает при напряжении U1 = U1н с частотой вращения n = nн и развивает на валу постоянный и независимый от частоты вращения момент. При снижении напряжения в k раз магнитный поток из формулы (4.36) в предположении, что ЭДС примерно равна напряжению, поданному на двигатель,
Φ0 = |
U1 |
(5.152) |
|
4,44w1kоб1 f1 |
|||
|
|
уменьшится тоже в k раз. Вместе с потоком в k раз должен уменьшиться и момент M = cмI2Ф, но при постоянном моменте на валу электромагнитный момент тоже остается постоянным. Это возможно только при увеличении в k раз тока I2:
М = сk I2 |
1 |
Φ = cI2Φ = const . |
(5.153) |
|
k |
|
|
Скольжение асинхронного |
двигателя, согласно |
уравнению (5.43), |
|
пропорционально потерям мощности в обмотке ротора или квадрату тока:
|
p |
эл2 |
|
m r I |
2 |
′ |
2 |
|
|
|
|
2 2 2 |
|
|
|||
s = |
|
|
= |
|
|
= c I2 . |
(5.154) |
|
Р |
MΩ1 |
|
||||||
|
|
|
|
|
|
|||
Если ток роторной обмотки I2 увеличивается в k раз, то скольжение увеличивается в k2 раз и новой величине напряжения U1 = U1н/k будет соответствовать новая частота вращения ротора:
n = n (1 − k 2 s) < n |
н |
. |
(5.155) |
1 |
|
|
Пределы регулирования частоты вращения возможны от s = sн до s = sкр.
242