

ЭЛЕКТРОСНАБЖЕНИЕ_2 / ЭЛЕКТРО_Почаевец
.pdf1--0 |
|
|
|
00 |
а |
о |
8 |
о |
|
|
ФИ
-' 50 Гц |
• |
• |
|
б |
Синхронная питающаJ. сеть |
z |
|
|
|
||
|
|
|
Сигналы |
|
|
... |
|
|
|
||
|
|
... |
--- |
|
|
... |
|
|
|
.-. |
-- |
|
|
.... |
..... |
|
|
|
--- |
~ |
о |
|
|
,..----.,;;:..... |
~l |
|
|
~ |
1 |
|
|
>- |
~ |
,",\ |
Сигналы |
t:: |
--. ( |
|
Синхр. |
|
з: |
|
|
ш |
~\ |
|
|
~ |
, |
|
импульсы |
|
|
|
|
~
:s::
~
~
~=:1___-~
u J
а - от общей пкrающей сети; б -
|
|
|
|
|
|
|
|
фи |
|
|
фи |
||
|
|
|
о |
|
|
|
...... |
|
|
|
|
.,.,....,. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Р2,! |
|
1 |
|
|
|
|
|
|
|
|
|
|
__ _.f/ |
".j |
|
|
|
|
|
|
|
|
|
|||
-~ ) |
::: |
|
|
|
|
1 |
1 |
О О 1 фи |
|||||
г |
..... |
|
.. |
|
|
|
|
||||||
|
|
t |
|
|
|
|
|
|
|
|
~ |
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
:s::::5:: |
О |
~~-~~-~ |
У~ст~ан~о~в~к~а~в~н~у~п~ь~р~~~~ |
||||||
|
|
|
|
ёg~l |
|
|
|
|
|
|
|||
|
|
|
~~5~ |
|
г------- |
IZZ2 |
:i!....----- |
||||||
|
|
|
|
t:: (.) |
r-o ., |
|
|||||||
|
|
|
|
В |
g, |
5J===:::::;=::;=:;:::~~~== |
|||||||
|
|
|
|
|
|
|
1 |
1 |
(LO~ |
||||
|
|
|
|
|
ыхдд |
|
|
|
|
|
|
t |
|
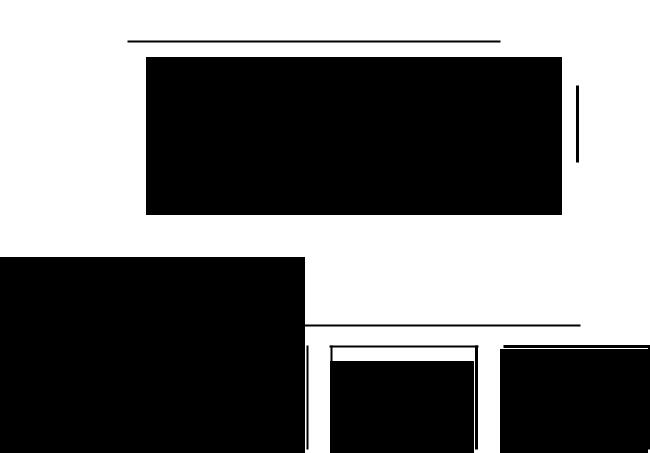
Рис. 5.8. Синхронизация распределителей:
циклическая; в - тактовая; г - времениая диаграмма работы распределителей
в результате чего импульсы на приемном устройстве могут посту
пать на позиции распределителя, отличающиеся от тех, на которых
они бьmи переданы;
- невозможность резервирования питания устройств телемеханики
другими источниками, например, применением аккумуляторной батареи. Синхронизация распределителей от общей питающей сети, дос
таточно широко используемая в промышленных устройствах теле
механики, оказывается неприемлемой при телемеханизации устройств
электроснабжения электрифицированных железных дорог.
Метод цuклuческой СUIIХрОlluзацuи (рис. 5.8, б) заключается в при менении индивидуальных генераторов тактовых импульсов гти1 и
ПИ2 с одинаковой частотой колебаний на передающем и прием
ном устройствах. Распределитель Р1 получает импульсы от генера- тора гги1, а Р2 - ГТИ2. Запуск распределителей осуществляется синхронизирующим импульсом в нулевой позиции. На распредели тель Р2 синхронизирующий импульс поступает по каналу связи с пе редающего устройства. Он воздействует на привод распределителя
Р2 и генератор ГТИ2, устанавливая их в исходное состояние, в кото
ром в этот момент находятся распределитель Р1 и генератор гти1. Выполнить генераторы тактовых импульсов с абсолютно одина ковой и стабильной частотой практически невозможно. Разница ча
стот генераторов всегда будет существовать и ошибка будет накап
ливаться с каждым шагом, что в конечном итоге вызовет рассинхро
низацию распределителей. Это является существенным недостатком.
Для предотвращения рассинхронизации необходима синхронизация
ГТИ2 с помощью фазирующего или дополнительного импульса в
конце каждого цикла передачи.
Метод тактовой СUllхро//uзацuu получил наиболее широкое при
менение, так как он обеспечивает наибольшую надежность. Этот
метод заключается в том, что оба распределителя переключаются одним генератором тактовых импульсов гти (рис. 5.8, в). Начало работы распределителей определяется фазирующим импульсом в
начале цикла, когда распределители находятся в нулевой позиции.
Если распределитель Р2 находится в другой позиции, то он устанав
ливается фазирующим импульсом в нулевую (рис. 5.8, г).
При таком методе синхронизации необходимы каналы связи для
передачи тактовых импульсов и сигналов (информационных импуль сов). Систему выполняют так, чтобы использовать один общий ка-
181
нал для информационных и тактовых импульсов. Для этого такто
Bым импульсам, которые передают на каждой позиции распредели телей, придают дополнительный импульсный признак, например,
временной. На рис. 5.8, г показано, что для передачи сигнала 1 ис
пользуется длинный импульс, а сигнала О - короткий. Переключе ние распределителей происходит в начале каждого импульса, неза висимо от его длительности. Импульсы отделяются друг от друга
паузами одинаковой продолжительности. Фазирующему импульсу
придают отличительный признак от сигналов О и 1; как правило, его
выполняют длиннее длинного, Т.е. сверхдлинным.
Синфазность работы распределителей передающего и приемного
устройств должна обеспечиваться во всех случаях дополнительными
методами. Окончание каждого цикла сопровождается посьmкой в
канал связи специального фазирующего'импульса, с помощью кото
рого проверяется вся предшествующая передача. Если прием этого
импульса не совпадает с переходом приемного распределителя в кон
трольную (обычно нулевую) позицию, то фиксируется сбой, приня тое сообщение аннулируется, распределители принудительно пере
водятся в режим синфазной работы.
5.5. приюршы въmолненияУCIJЮйcrвтел.еизм.ерения
Для передачи на расстояние значений параметров контролируе
мого производственного процесса применяются устройства телеиз
мерения. Особенностью телеизмерения, отличающей его от других
видов измерений, является преобразование измеряемой величины
в форму, удобную для передачи по каналу связи. При этом исходную
величину преобразуют сначала в промежуточную, которая изменя
ется во времени по тому же закону, что и контролируемая величина,
и носит название аналога контролируемой величины. Электричес
кий аналог затем преобразуется в сигнал, удобный для передачи по
каналу связи. Цель преобразования заключается главным образом в
том, чтобы свести к минимуму погрешности, вносимые каналом свя
зи, обеспечить необходимую помехоустойчивость и быстродействие.
В приемном устройстве полученный по каналу связи сигнал преоб
разуется в вид, удобный для отображения на сигнальных табло.
при телеизмерении, как и при других измерениях, точность оцени
вается по абсолютной, относительной и приведенной погрешности.
182
Абсолютная погрешность определяется по выражению
!iA=A |
-А |
(5.1) |
~ ~ |
Д' |
|
где Ап показания прибора на приемной стороне;
Ад - действительное значение контролируемой величины.
Относительная погрешность определяется по выражению
|
А |
-А |
|
оо = |
|
ПА |
д·l00 %. |
|
|
д |
|
Приведенная погрешностъ определяется выражением |
|||
о _ |
А |
-А |
д .100% |
|
П |
||
ПА'
тах
где Атах - максимальное значение измеряемой величины.
(5.2)
(5.3)
Информация, передаваемая по системе телеизмерения, может из
меняться во времени непрерывно или скачкообразно. Такой же ха..
рактер имеют и сигналы; их соответственно называют непрерывны
ми и дискретными. В системах с непрерывными сигналами с помо
щью электрического аналога контролируемой величины модулируют
переносчик информации аналогично тому, как это было описано в
первой главе.
Классификация систем телеизмерения (ТИ) осуществляется по раз
личным признакам: по принципу действия, по дальности действия,
по роду измеряемой величины и т.д.
Наиболее часто для устройств телеизмерения применяют класси
фикацию по параметрам переносчика информации. В соответствии с этой классификацией системы ТИ делятся на:
-системы интенсивности, которые используют в качестве пере
носчика постоянный ток, модулируемый по амплитуде;
-частотные системы, характеризуемые тем, что в качестве пере
носчика информации используются импульсы постоянного тока или
переменный ток, причем частота импульсов или частота переменно го тока зависят от значения контролируемой величины;
- импульсные системы, в которых в качестве переносчиков инфор
мации используется периодическая последовательность импульсов;
183
- кодовые системы характеризуются тем, что измеряемая величи
на преобразуется и передается по каналу связи в виде цифрового кода, Т.е. определенной комбинации импульсов (коДоимпульсная модуля
ция-КИМ).
Системы UllmellcuBllocmu являются устройствами ТИ ближнего
действия, так как с увеличением дальности передачи возрастают токи утечки и сопротивление линий связи, в результате чего снижается точность ТИ. Импульсные и частотные системы относятся к устрой
ствам ТИ дальнего действия и могут использоваться для передачи телеизмерительной информации в системах телемеханики устройств
электроснабжения железных дорог.
Частотllые системы ТИ позволяют передавать информацию по
занятым линиям связи без дополнительной. аппаратуры частотного
. .
уплотнения, при этом несущая частота устройства ТИ размещается
в свободной части частотного диапазона линии.
Импульсные устройства ТИ подразделяются на частотно-импуль" сные (с ЧИМ модуляцией), времяимпульсные (с ШИМ модуляцией), фазоимпульсные (с ФИМ модуляцией), кодоимпульсные (с КИМ модуляцией).
Кодовые системы ТИ при использовании КИМ модуляции даJОТ возможность обеспечить любую требуемую точность, позволяют обойтись без специальных каналов связи ТИ и передавать кодовые
комбинации ТИ по системе телесигнализации.
Принцип выполнения этой системы заключается в том, что не
прерывная функция времени F(t) квантуется (заменяется дискретной)
по амплитуде или по времени. Каждое дискретное значение переда
ется определенной кодовой :комбинацией.
На рис. 5.9 представлена структурная схема кодоимпульсной сис
темы ТИ, которая состоит из датчика Д (первичного преобразовате ля измеряемой величины), аналогоцифрового преобразователя
Рис. 5.9. Структурная схема КОДОВОЙ системы телеизмерения
184
(АЦП), блоков разделения элементов сигнала, линейных передатчи
ка (ЛП) и приемника (ЛПр) канала связи, линии связи, декодирYIО
щего устройства (ДКУ) и цифрового индикатора (ЦИ).
Измеряемая величина F(t) преобразуется с помощью датчика в
аналог U(t), поступающий на преобразователь АЦП, на выходе ко торого образуется сигнал в виде кодовой комбинации. Элементы
сигнала разделяются с помощью блока РЭС и поступают на аппара
туру канала связи, на выходе с которого элементы сигнала попада
ют в блок РЭС, преобразуясь в ВИд, удобный для декодирования в блоке ДКУ. Далее сиmал в ВИде числа, соответствующего значению
величины F(t), поступает на цифровой индикатор, который визуаль
но воспроизводит результат измерения.
Применение дискретных сигналов в кодовых системах ТИ позво ляет объединить их с системами ТУ и ТС в единую комплексную си
стему телемеханики. В этом случае для передачи кодовых комбина ций ТИ используются устройства ТС. Это осуществлено в системе
телемеханики электрифицированных железных дорог «Лисна». В ней с помощью устройств ТИ осуществляется передача уровня напряже ния в контактной сети, линиях автоблокировки, а также расстояния
в них до места к.з.
5.6. ка.налыI связителемеханики
Каналы связи являются ответственной частью системы управле
ния, во многом определяющей надежность и точность передачи ин
Формации от ее источника до приемника.
КанШlОМ связи или канШlОМ передачи информации называется сово
купность приемопередающей аппаратуры и линии связи, предназна
ченных для независимой передачи сигналов на расстояние от источ
ника информации до ее приемника.
В системах телемеханики широко используются электрические ка налы связи. В соответствии с характером и расположением объектов
управления и контроля выбирается структура и конфигурация линий
связи, которые в каждом КОНКpe11:Iом случае будут иметь свои особен
ности. Линии связи могут быть: радиальными (см. рис. 5.3, а), когда
каждый КП соединяется с ДП отдельной линией; цепочными или лу
чевыми (см. рис. 5.3,6), у которых рассредоточенные КП последова тельно присоединяются к общей линии связи без пересечений и ответ-
185
влений; древовидными одно- (см. рис. 5.3, в) и многоствольными (см.
рис. 5.3, г), когда к общей линии связи в различных точках подключа
ют рассредоточенные КП с ответвлениями от основных направлений. На предприятиях транспорта и промыленностии обычно исполь зуются электрические каналы связи по кабельным и воздушным про
водным линиям.
ВоздУШllые ЛUIlUU - наиболее старый вид проводной связи. Они
очень подвержены влиянию внешних условий и помех. дJ.Iя ВЛ ис
пользуют стальные и биметаллические (стальные, покрытые слоем меди) провода. Линии со стальными проводами имеют худшие ха
рактеристики, однако их стоимость значительно ниже, поэтому они
находят широкое применение.
Кабельuые ЛUIlUU получили наибольщее распространение, несмот ря на их высокую стоимость (в 8-1 О раз выше ВОЗДУШНЫХ). Эго объяс няется рядом существенных преимуществ кабельных линий, которые заключаются в их высокой механической прочности, значительно
меньшей зависимости ОТ метеоусловий и т.д. Кроме того, во многих
случаях вообще не представляется возможным про:кладывать воздуш
ные линии (например, вдоль железнодорожных линий, электрифи
цированных на переменном токе).
По одной паре проводов может осуществляться либо односторон няя (с и м п л е к с н а я), либо двусторонняя (д у п л е к с н а я) связь. На рис. 5.1 О приведена структурная схема телемеханической связи. для
работы устройств телемеханики при симrmексной связи (рис. 5.1 О, а) необходимо иметь две пары проводов: в одной ИЗ них образуются каналы телеуправления (ту), работающие в одну сторону; в другой -
каналы телесигнализации (ТС) и телеизмерения (ТИ), работающие
по линии те. При этом для передачи приказов ТУ с диспетчерского пункта ДП на КП можно использовать одну частотуfтy переменНО
го тока или две -fТУl И!ТУ2' Передача сообщений ТС и ти с каж
дого КП ведется на своей частоте ifTCl'!TC2 и т.д.).
Дуплексная связь (рис. 5.10, б) осуществляется по одной общей
паре проводов как для телеуправления, так и для телесигнализации.
Для уменьшения влияния передатчиков на приемники одного и того
же пункта при дуплексной связи их подключают к линии связи через
дифференциальные фильтры (ДФ). Однако полностью исключить это
влияние на удается, уровень помех при дуплексной связи оказывает
ся более высоким, чем при симплексной.
186
а
ЛИНИЯ ТУ
ЛинияТС
б
Линия СВЯЗИ
Рис. 5.10. Структурные схемы симплексной (а) и дуплексной (6) телемеханичес
кой связи
в системах телемеханики электрифицированных железных дорог
применяют частотные каналы связи. Аппаратура позволяет образо
вывать до 19 каналов на частотах от 450 до 3690 Гц. Частоты сосед них каналов отличаются друг от друга на 180 Гц.
На рис. 5.11, а представлена структурная схема передатчика час
топlо-модулироваIпIыхсиrnалов, включающего всебя: модулятор (М),
изменяющий частоту генератора в процессе модуляции; генератор (п,
создающий несущую частоту канала; каскад предварительного усиле
ния (ПУ); полосовой фильтр (ПФ); выходной усилпгелъ мощности (ВУ)
и линейный блок (ЛБ), обеспечивающий присоединение передатчика
к линии связи. Кодовая серия телемеханики поступает на модулятор,
который изменяет частоту работы генератора в соответствии с посту
пающими элементами кодовой серии. Предварительно усиленные уси
лителем ПУ чаСТОnIые импульсы через фильтр ПФ поступают на уси литель ВУ, с которого модулированные и усиленные до необходимо
го уровня импульсы через линейный блок поступают в линию связи.
187
а
б
Рис. 5.11. Структурные схемы устройств каналов связи передатчика (а) и приемника (6) ЧМ-сигналов
Приемник частотно-модулированных (ЧМ) сигналов (рис. 5.11, б)
состоит из следующих блоков: линейнqго блока, обеспечивающего присоединение приемника к линии связи; полосового фильтра (Ф); усилительного каскада (У); усилителей-ограничителей (УО1 и УО2)
дЛЯ ограничения сигналов с большой и малой амплитудой; дискри
минатора д, осуществляющего детектирование частотно-модулиро
ванных сигналов; выходного триггера (ТГ), с выхода которого сиг нал поступает на объект ТУ или на сигнальный элемент те.
Количество сообщений, которое можно передать по проводIIыIM линиям связи, ограничено рабочей полосой частот, используемых для передачи информации.
ВQЛОКОll1l0-0nmuческие ЛUllии связи (ВОЛС) позволяют значитель но расширить рабочую полосу частот. воле используются для пе редачи информации в виде модулированного пучка света, распрост раняющегося внутри гибких оптических волокон.
Первая воле на железных дорогах России бъmа проложена в 1985 г.
на участке Ленинград-Волховстрой Октябрьской железной дороги.
Протяженность ее составила 120 км. Через 20 лет общая протяжен
ность железнодорожных воле возросла до 50 тыс. км.
Типовая схема системы связи, использующей воле, показана на рис. 5.12. Аналоговый сигнал, генерируемый оконечным оборудова нием данных (ООД), например, телефоном, приходит на узел комму
тации, где аналого-цифровой преобразователь (АЦП) (на рис. 5.12-
кодер) осуществляет кодирование сиrnалов в цифровой поток. Этот
поток используется для модуляции светового потока в оптическом
передатчике, который передает серию оптических импульсов в оп тическое волокно. На линии установлены повторители, предназна..
188

Аналоговый Цифровой ПОТОК Имnym.cы |
ИМПУЛЬСL.l |
Цифровой потох |
Аналоговый |
||
|
64 Кбит/с |
света |
|||
сигиал |
света |
64 Кбит/с |
сШ'Нал |
||
|
|
|
|
|
|
I\/VV
~
IlГlГL IlГlГL J1I1J1. IlГlГL I\/VV
|
|
|
~ |
||||
ОпrичесlCИЙ |
|||||||
|
|
|
|
||||
передarчиx |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Волокно |
Волокно |
|||||
Рис. 5.12. Структурная схема системы связн с использованием воле
ченные для усиления ослабевающего в процессе передачи оrnического
сигнала. Если передающая и приеМllая станrщи удалены друг от друга
на большое расстояние, например, на несколько сот километров, то
может потребоваться несколько промежyrочпых повторителей.
На приемной стороне импульсы света преобразуются обратно в
электрический сигнал с помощью оптического приемника, с которо
го цифровой поток поступает на декодер, преобразующий его в ана
логовый сигнал оод.
Волоконно-оптичес:кие линии связи обладают целым рядом пре
имуществ по сравнению с проводными. Они обладают большой про
пускной способностью, защищенностью от внешних электромагнит
ных воздействий, малыми потерями сигнала при его распростране
нии, электробезопасностью, экономией дефицитных цветных металлов. К недостаткам воле можно отнести высокую стоимость приемопередающего оптического оборудования.
Сооружения большого количества воле в короткие сроки на железнодорожном транспорте бьшо достигнуто благодаря исполь
зованию технологии подвески кабеля на опорах контактной сети и
высоковольтных линиях автоблокировки.