

2.1.5 Оцінка якості скорегованої сас
Передаточна функція розімкненої системи управління з урахуванням корегуючого пристрою має наступний вигляд:
|
|
Передаточна функція замкнутої системи визначається як:
|
|
Для оцінки якості скорегованої системи необхідно побудувати перехідну характеристику – реакцію замкнутої системи з корегуючою ланкою на вхідну ступінчасту дію. Вона визначатиметься як:
|
|
Перехідна
характеристика системи, визначена в
програмі Mathcad. Графік
перехідного процесу в скорегованій
системі зображено на рис. 23. Пунктирними
лініями вказана 5% зона відхилення
вихідної величини від сталого значення,
оскільки задана статична помилка −
![]() .
.
|
|
|
Рис. 23 – Графік перехідного процесу |
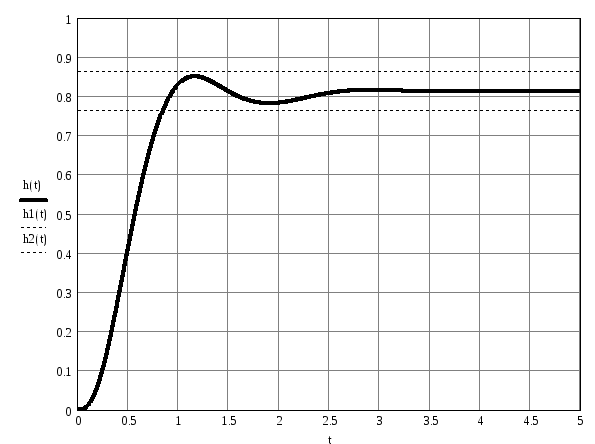
З графіка перехідного процесу можна визначити параметри, що визначають якість процесу управління, а саме:
1) час
регулювання
![]() ,
що задовольняє заданому у технічному
завданні значенню;
,
що задовольняє заданому у технічному
завданні значенню;
2)
перерегулювання
![]() ,
що задовольняє заданому у технічному
завданні значенню.
,
що задовольняє заданому у технічному
завданні значенню.
Технічне
завдання передбачає максимальний час
регулювання (час, за який перехідний
процес увійде до 5% зони відхилення від
сталого значення і вже не вийде з неї
після цього) рівним 0.9 с. Таким чином,
отриманий параметр
![]() відповідає технічному завданню.
відповідає технічному завданню.
В завданні
також вказується, що максимальна величина
перерегулювання (частка амплітуди
максимального викиду перехідного
процесу над сталим значенням від величини
амплітуди сталого режиму системи
управління) дорівнює 18 %. Отриманий
параметр
![]() відповідає технічному завданню.
відповідає технічному завданню.
Таким чином, за допомогою синтезу послідовного корегуючого пристрою була отримана система управління із заданими характеристиками.
2.2 Синтез дискретної системи
Завдання ЦОМ [12](цифрової обчислювальноїмашини) полягає в забезпеченні бажаних динамічних характеристик системи управління за допомогою використання в ЦОМ програм, що коректують. У цьому випадку ЦОМ є по суті цифровий фільтр із заданими характеристиками.
Цифрові системи управління мають квантування за часом, що відносить їх до класу дискретних (імпульсних) систем, і квантування за рівнем (у аналого-цифрових і цифро-аналогових перетворювачах). Якщо розрядність вхідних і вихідних перетворювачів достатньо велика, то їх нелінійністю можна нехтувати, при цьому розглядається лінеаризована дискретна система з урахуванням впливу, що надається квантуванням за рівнем, у вигляді додаткового шуму квантування, що розглядається як випадковий процес з рівноімовірним законом розподілу.
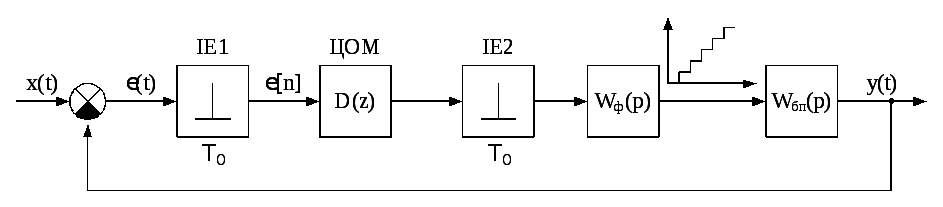
Спрощену
структурну схему цифрової системи
подано на рис. 24. Безперервний сигнал
похибки
![]() імпульсним елементом ІЕ1
перетворюється
в решітчасту цифрову функцію
імпульсним елементом ІЕ1
перетворюється
в решітчасту цифрову функцію
![]() і
надходить на вхід ЦОМ, яку подано у
вигляді передаточної функції
і
надходить на вхід ЦОМ, яку подано у
вигляді передаточної функції
![]() .
Вихідний
сигнал ЦОМ імпульсним елементом ІЕ2
і
формувачем (екстраполятором)
.
Вихідний
сигнал ЦОМ імпульсним елементом ІЕ2
і
формувачем (екстраполятором)
![]() перетворюється в ступінчастий сигнал.
Безперервну частину системи подано
ланкою з передаточною функцією
перетворюється в ступінчастий сигнал.
Безперервну частину системи подано
ланкою з передаточною функцією
![]() .
.
|
|
|
Рис. 24 – Спрощена структурна схема цифрової системи |
На виході
формувача імпульсів протягом усього
періоду квантування
![]() зберігається попереднє значення сигналу,
тому формувач є фіксатором (екстраполятором)
нульового порядку. Його передаточна
функція має вигляд
зберігається попереднє значення сигналу,
тому формувач є фіксатором (екстраполятором)
нульового порядку. Його передаточна
функція має вигляд
|
|
або,
через те що![]() ,
,
|
|
Передаточна функція приведеної безперервної частини системи визначається за формулою
|
|
а її дискретна передаточна функція – за формулою:
|
|
Якщо в
каналі керування є затримка часу ![]() ,
то попередній вираз запишеться у вигляді
,
то попередній вираз запишеться у вигляді
|
|