

1.6 Дискретні сас
САС називається дискретною, якщо вона містить, хоча б одну ланку дискретної дії. Дискретна ланка – це ланка, вихідна величина якої змінюється дискретно, тобто стрибкоподібно, навіть при плавній зміні вхідної величини.
Дискретний елемент перетворює безперервні сигнали в дискретні за рахунок квантування вхідних сигналів. Розрізняють три види квантування [12]:
1) квантування сигналу за рівнем (рис. 9, а) – фіксуються певні дискретні значення рівнів сигналу в довільні моменти часу. Системи з квантуванням сигналу за рівнем називаються релейними. Вони завжди «нелінійні».
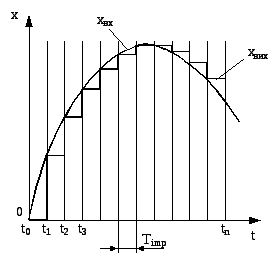
2) квантування сигналу за часом (рис. 9, б) – значення сигналу, що безперервно змінюється, передаються дискретно через певні проміжки часу (у вигляді імпульсів). Безперервний сигнал представляється у вигляді послідовності короткочасних імпульсів, а між імпульсами квантований сигнал не фіксується. Системи з квантуванням сигналу за часом називаються імпульсними. Імпульсні системи можуть бути лінійними і нелінійними.
3) квантування сигналу за рівнем і за часом (рис. 9, в) – безперервний сигнал представляється у вигляді послідовності чисел, які передаються в дискретні моменти часу. При цьому безперервний сигнал замінюється дискретними рівнями, найближчими до значень безперервного сигналу в дискретні моменти часу. Квантування сигналів за рівнем і за часом здійснюється імпульсно-кодовим модулятором або цифровим обчислювальним пристроєм (ЦОП). Системи з квантуванням сигналів за часом і за рівнем називаються цифровими. Вони завжди нелінійні, але в деяких випадках в першому наближенні можуть розглядатися як лінійні імпульсні.
|
|
|
|
|
а) |
б) |
в) |
|
|
|
|
|
Рис. 9 – Види квантування: квантування сигналу за рівнем (а); квантування сигналу за часом (б); квантування сигналу за рівнем і за часом (в) | ||


Імпульсні і цифрові САС дозволяють формувати закони управління з урахуванням зміни збурюючих дій і характеристик керованого об’єкту, тобто такі САС мають властивості самоналагоджувальних та оптимальних систем, систем із змінною структурою.
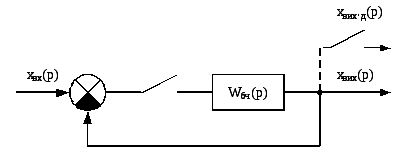
Будь-яку імпульсну систему можна представити у вигляді з’єднання імпульсного елементу (ІЕ) і безперервної частини системи (БЧ). У замкнутій імпульсній системі імпульсний елемент знаходиться усередині замкнутого контуру; він може входити до складу прямого кола або кола зворотного зв’язку. Загальну функціональну схему імпульсної САС можна представити у вигляді, зображеному на рис. 10.
Основна відмінність імпульсної САС від безперервної полягає в тому, що сигнал розузгодження в ній виробляється і подається на безперервну частину системи в дискретні моменти часу. У ці моменти відбувається замикання системи, в решті часу імпульсна система працює як розімкнена.
Оскільки безперервна частина імпульсної або цифрової САС реагує на дії тільки в певні дискретні моменти часу (визначувані роботою імпульсного елементу або ЦОП), ці дії можна представити у вигляді функцій дискретного аргументу, тобто так званими ґратчастими функціями.
|
|
|
Рис. 10 – Загальна функціональна схема імпульсної САС |
Решітчастою функцією називають таку функцію, значення якої фіксуються тільки при дискретних рівновіддалених (на період) один від одного значеннях аргументу, а між цими значеннями незалежної змінної функція дорівнює нулю.
Решітчаста
функція позначається символом
![]() ,
де
,
де![]() − додатна величина, що визначає відстань
між сусідніми дискретними значеннями
незалежної змінноїt,
а
п
–
будь-яке
ціле число (n
= 0, 1, 2 . . .).
− додатна величина, що визначає відстань
між сусідніми дискретними значеннями
незалежної змінноїt,
а
п
–
будь-яке
ціле число (n
= 0, 1, 2 . . .).
Співвідношення
між решітчастою функцією
![]() і її різницями різних порядків
і її різницями різних порядків![]() визначає рівняння, званерізницевим
рівнянням.
Різницеві рівняння з’являються при
дослідженні фізичних систем, в яких
частина змінних змінюється дискретно
або стрибкоподібно. Наприклад, в
ланцюгових схемах електроустаткування
суден (фільтри, еквіваленти довгих
ліній, гірлянди ізоляторів, дільники
напруги тощо). У колах з параметрами, що
стрибкоподібно змінюються, такою змінною
є час.
визначає рівняння, званерізницевим
рівнянням.
Різницеві рівняння з’являються при
дослідженні фізичних систем, в яких
частина змінних змінюється дискретно
або стрибкоподібно. Наприклад, в
ланцюгових схемах електроустаткування
суден (фільтри, еквіваленти довгих
ліній, гірлянди ізоляторів, дільники
напруги тощо). У колах з параметрами, що
стрибкоподібно змінюються, такою змінною
є час.
До різницевих рівнянь приводяться різні задачі, зокрема з теорії інтерполяції. ЦОП описується різницевими рівняннями, які визначають собою послідовність його дій і зазвичай називаються програмами.
Для дослідження цифрових, а також імпульсних систем застосовують [12] апарат дискретного перетворення Лапласа. В даний час для аналізу і синтезу дискретних САС широко використовується так зване z-перетворення. Для будь-якої функції х(t), для якої можливе перетворення Лапласа можна знайти z-перетворення відповідно до формули:
|
|
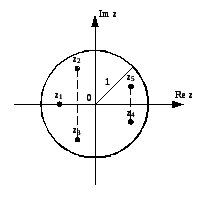
У стійкій
дискретній системі корені характеристичного
рівняння повинні лежати усередині кола
з одиничним радіусом (рис. 11), тобто
![]() .
.
Для
оцінки якості роботи імпульсних і
цифрових САС необхідно побудувати криву
перехідного процесу, тобто визначити
закон зміни вихідної величини
![]() за
заданим законом зміни управляючої дії
за
заданим законом зміни управляючої дії
![]() при відомих структурі і параметрах
системи.
при відомих структурі і параметрах
системи.
|
|
|
Рис. 11 – Умова стійкості дискретних САС |
Для
визначення кривої перехідного процесу
потрібно отримати вираз дискретного
перетворення Лапласа від вихідної
величини
![]() .
Якщо
відома
.
Якщо
відома
![]() ,
то, розклавши її на прості дроби і
застосувавши зворотне перетворення
Лапласа (для чого можна використовувати
таблицю відповідностей), неважко
визначити криву перехідного процесу.
,
то, розклавши її на прості дроби і
застосувавши зворотне перетворення
Лапласа (для чого можна використовувати
таблицю відповідностей), неважко
визначити криву перехідного процесу.