

Плоское движение. Определение ускорений точек
1. Аналитический способ,
Зная уравнения движения точки xB = xB(t); yB = yB(t), находим
![]() ;
;
![]() ;
;
![]() .
.
2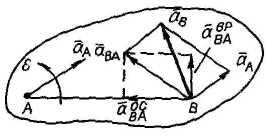 .Теорема
о распределении ускорений.
Дифференцируя равенство
.Теорема
о распределении ускорений.
Дифференцируя равенство![]() ,
получим
,
получим
![]()
![]() -
ускорение точки B
при вращении фигуры вокруг полюса A
-
ускорение точки B
при вращении фигуры вокруг полюса A
![]() ;
модули
;
модули
![]() ;
;
![]() ;
;
![]() .
.
Т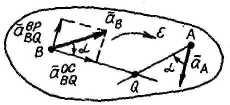 аким
образом, формула распределения ускорений
точек плоской фигуры
аким
образом, формула распределения ускорений
точек плоской фигуры
![]() .
.
3. Мгновенный центр ускорений (МЦУ).
Ускорения точек при плоском движении можно определять по формулам вращательного движения, используя понятие МЦУ. МЦУ - точка, связанная с плоской фигурой, ускорение которой в данный момент времени равно нулю (aQ = 0).
Положение МЦУ определяется формулами
![]() ;
;
![]() .
.
Принимая точку q за полюс, имеем для произвольной точки
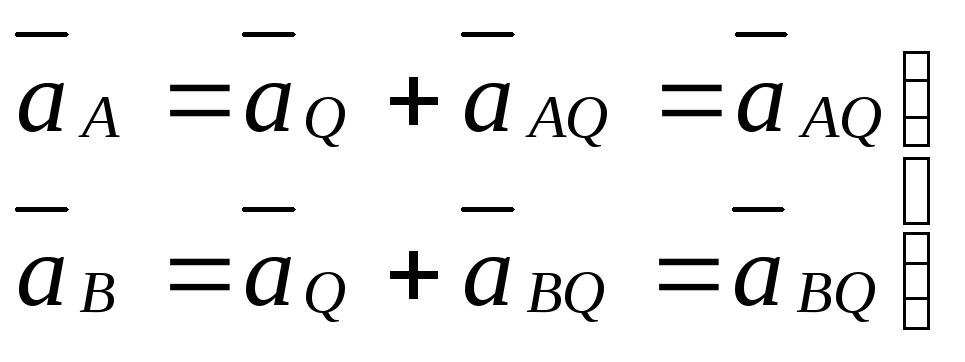 ,
тогда
,
тогда
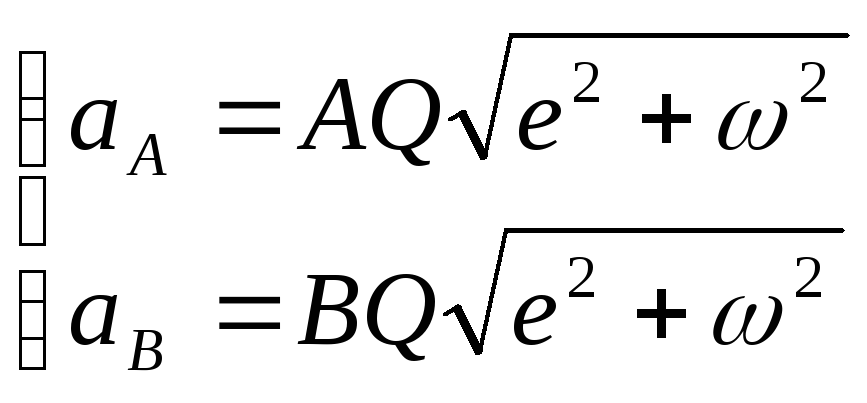
Отсюда
![]() ,
т.е. ускорения точек плоской фигуры
пропорциональны их расстояниям до МЦУ.
,
т.е. ускорения точек плоской фигуры
пропорциональны их расстояниям до МЦУ.
П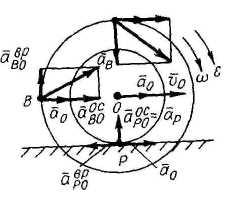 римеры
римеры
1). Колесо вагона катится без скольжения по прямолинейному рельсу. Определить ускорения точек B и P, а также положение МЦУ, если v0 = 50 см/с; а0 = 29 см/с2; r = 50 см; R = 60 см.
Решение
1.
Точка P
- МЦС колеса, следовательно, угловая
скорость
![]() с-1
с-1
2. Угловое ускорение e получим, учитывая, что PO = г = const:
![]() с-2.
с-2.
3.
Ускорение точки B
![]() ,
где
,
где
![]() см/с2;
см/с2;
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
4.
Ускорение точки P
(МЦС)
![]() ,где
,где
![]() см/с2;
см/с2;
![]() см/c2.
Так
как в данном случае
см/c2.
Так
как в данном случае
![]() ,
то
,
то
![]() ;
;![]() см/с2.
Аналогичным
образом определяются ускорения других
точек.
см/с2.
Аналогичным
образом определяются ускорения других
точек.
5)
зная а0,
w
и e,
находим положение мгновенного центра
ускорений колеса
![]() ;
;![]() см.
см.
Повернув
вектор
![]() в направленииe
на угол a
и отложив отрезок OQ,
получаем точку Q
- МЦУ колеса.
в направленииe
на угол a
и отложив отрезок OQ,
получаем точку Q
- МЦУ колеса.
Тогда
![]() и
т.д.
и
т.д.
Примеры (продолжение)
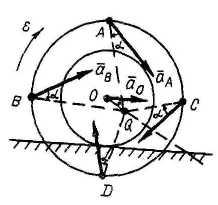
2). В данный момент времени кривошип OA вращается с wOA= 1c-1, eOA =4 с-2. Каток катится без скольжения. OA=AB = 4R = 4 м. Определить vA, vB, wAB, wk, aA, aB, eAB, ek.
Решение
Определение
скоростей:
![]() м/c;
м/c;
![]() .
.
МЦС
звена AB
- точка PAB.
Поэтому угловая скорость
![]() с-1;
с-1;
![]() м/с;
угловая скорость
м/с;
угловая скорость
![]() с-1.
с-1.
О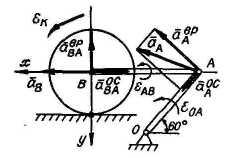 пределение
ускорений:
пределение
ускорений:
ускорение
точки A
![]() ,
,
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() ;
;![]() м/с2.
м/с2.
Ускорение
точки B
![]() , (1)
, (1)
Где
![]() м/с2,
м/с2,
![]() .
.
Предположив,
что
![]() и
и
![]() .
Направлены как на рисунке, проектируем
(1) на оси х (||AB)
и у (
.
Направлены как на рисунке, проектируем
(1) на оси х (||AB)
и у (![]() AB):
AB):
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
Знак
« - » означает, что действительное
направление
![]() противоположно показанному на рисунке.
противоположно показанному на рисунке.
Так
как
![]() ,
то
,
то![]() с-2.
с-2.
Направление
eAB
определяется направлением вектора
![]() относительно т. A.
Поскольку bpk=
const,
то
относительно т. A.
Поскольку bpk=
const,
то
![]() с-2.
с-2.
3). В заданном положении механизма угловая скорость wOA = 3 с-1; угловое ускорение eOA = 6 с-2; OA = 0,6 м; AB = 1,2 м; CD = 1,4 м; O1B = 0,4 м; AC = CB.
Найти
vB,
vD,
wAB,
wCD,
![]() ,aB,
eAB.
,aB,
eAB.
Решение
Скорость
точки A
![]() м/с.
м/с.
МЦС
звена AB
– точка PAB:
![]() м/с;МЦС
звена CD
– точка
м/с;МЦС
звена CD
– точка
![]() с-1;
с-1;
![]() м/с;
м/с;![]() м/с;
м/с;![]() с-1;
с-1;
![]() с-1
с-1
Ускорение точки A
![]() ;
;
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
Ускорение
точки B
![]() ;
;
![]() ,или
,или
![]() ,
где
,
где![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() .
Проектируем (1) на оси х (||AB)
и у (
.
Проектируем (1) на оси х (||AB)
и у (![]() AB):
AB):
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() ;
;![]() м/с2
м/с2
Угловое
ускорение звена AB
![]() с-2.
с-2.
Истинное направление eAB показано на рисунке.
3.4 Сферическое движение
Это движение тела, при котором все точки движутся по сферам, общий центр которых совпадает с неподвижной точкой.
Положение тела в любой момент времени может быть задано тремя углами Эйлера: , , (, , - оси, связанные с телом):
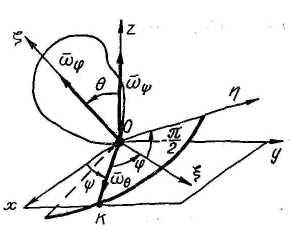
-
угол собственного вращения;
-
угол собственного вращения;
- угол прецессии;
- угол нутации.
(OK - линия узлов.)
Уравнения движения:
= (t), = (t), = (t).
Сферическое движение можно рассматривать как совокупность последовательных бесконечно малых поворотов вокруг мгновенных осей вращения, проходящих через неподвижную точку.
Кинематические характеристики тела:
![]() -
мгновенная угловая скорость (направлена
вдоль мгновенной оси вращения);
-
мгновенная угловая скорость (направлена
вдоль мгновенной оси вращения);
![]()
![]() -
мгновенное угловое ускорение;
-
мгновенное угловое ускорение;
В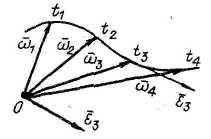 ектор
ектор![]() направлен по касательной к годографу
вектора
направлен по касательной к годографу
вектора![]() в рассматриваемый момент времени
(аналогия:
в рассматриваемый момент времени
(аналогия:
![]() ).
).
Векторы
![]() ,
,![]() принято откладывать от неподвижной
точки тела.
принято откладывать от неподвижной
точки тела.
Определение
углового ускорения: представим
![]() в виде
в виде![]() .
.
Где
![]() - орт мгновенной оси вращения;
- орт мгновенной оси вращения;
- алгебраическое значение угловой скорости.
Тогда
![]()
1.
Если
![]() (ось неподвижна), то
(ось неподвижна), то![]()
2.
Если
= const
(вектор
![]() изменяется только по направлению). То
изменяется только по направлению). То
![]()
Где
![]() - угловая скорость вращения вектора
- угловая скорость вращения вектора
![]() .
.
(аналогия
-
![]() приr
= const.)
приr
= const.)
Скорости точек тела:
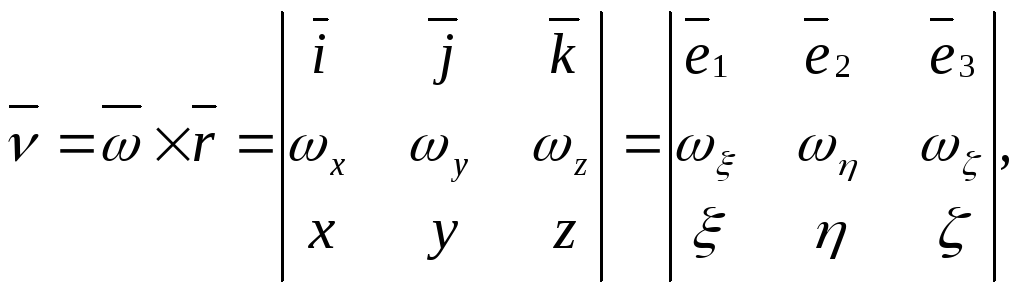
Где
![]() ,
,![]() ,
,![]() орты неподвижной системы координат
орты неподвижной системы координат
x,
у, z;
![]() -
орты подвижной системы координат,
,
.
-
орты подвижной системы координат,
,
.
Ускорения точек тела:
![]()
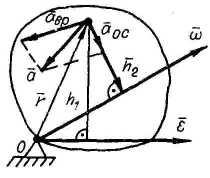 Вращательное:
Вращательное:
![]()
Осестремительное:
![]()
![]()
Модули
![]()
![]()
Пример
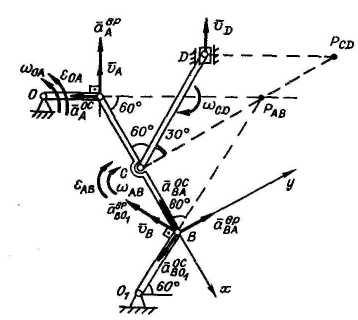
Ось OA, на которую свободно насажено тело 1, вращается вокруг вертикальной оси, имея в данный момент угловую скорость 1 = 1,6 с-1 и угловое ускорение e1 = 2,8 с-2.
Определить мгновенные угловую скорость и угловое ускорение тела 1, а также скорость и ускорение точки M, если тело 1 катится по неподвижному конусу 2 без скольжения; OK = 30 см; KM = 10 см.
Решение:
Тело 1 совершает сферическое движение. Мгновенная ось вращения совпадает с линией касания тел 1 и 2 (OB).
1. Угловая скорость.
Имеем
![]()
г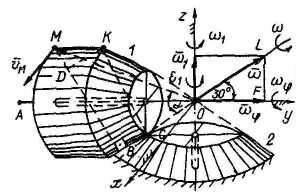 де
де![]() -
угловая скорость вращения тела
1. Вокруг оси оа.
-
угловая скорость вращения тела
1. Вокруг оси оа.
Вектор
![]() расположен на мгновенной оси вращения.
Из треугольникаOFL
находим
расположен на мгновенной оси вращения.
Из треугольникаOFL
находим
![]()
2. Скорость точки M.
Имеем
![]()
Вектор
![]() параллелен оси Ox.
параллелен оси Ox.
Модуль скорости
![]()
Из треугольников МКО, ОМВ, МКД и ОСК находим
![]()
![]()
![]()
![]()
В результате
![]()
3.
Угловое ускорение. Так как
![]() ,
где
,
где
![]() - орт мгновенной оси вращения,
- орт мгновенной оси вращения,
![]()
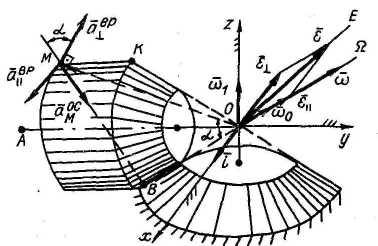
где
![]()
Введем обозначения:
![]()
![]()
Где
![]() - орт оси.Ox.
- орт оси.Ox.
Тогда
![]()
Так
как
![]() и
и
![]() взаимно перпендикулярны, то
взаимно перпендикулярны, то
![]()
Учитывая,
что
![]()
![]()
Получим
![]()
4. Ускорение точки M.
Имеем
![]()
Вектор
осестремительного ускорения
![]() направлен по MB.
направлен по MB.
Модуль
![]()
Вращательное
ускорение
![]()
Модули
![]()
![]()
Направления
векторов
![]() и
и
![]() совпадают, а вектор
совпадают, а вектор
![]() расположен
в плоскости yOz
и перпендикулярен OM.
расположен
в плоскости yOz
и перпендикулярен OM.
Модуль ускорения
![]()