

2.3 Микропрограммные автоматы с жесткой логикой
Рассмотрим структуру и принципы работы МПА с жесткой логикой.
2.3.1 Мпа на базе управляющего автомата Мили.
Работа автомата задается граф-схемой алгоритма (ГСА), полученной из функциональной схемы алгоритма работы данного операционного устройства [л 5, л 8]. В состав (рис. 33) МПА входят следующие структурные элементы: 2-х ступенчатая память автомата, дешифратор состояния (ДСсост.) и две комбинационные схемы КС1 и КС2. Память служит для запоминания состояния автомата. Во II ступени фиксируется текущее состояние, по которому комбинационная схема КС1 формирует набор управляющих сигналов. I ступень предназначена для формирования следующего состояния в зависимости от предыдущего и значений осведомительных сигналов. Переключение I ступени памяти осуществляет схема КС1. Двухступенчатая память применяется для исключения «гонок» из-за разницы в величине задержек в КС1 при переключении различных разрядов памяти.

Рис.33
Предположим, что ГСА имеет следующий вид (Рис. 34). Выходы операторных вершин, отмеченные символами а1, а2, … соответствуют состояниям памяти МПА. Выход вершины «начало» и вход в вершину «конец» отмечен одним и тем же символом а1 и соответствует одному и тому же состоянию памяти и означает, что после выполнение своих функций по генерации {y} в соответствии заданной ГСА, МПА возвращается в исходное положение до следующей инициализации.
Начало работы автомата обеспечивает сигнал «В», устанавливаемый извне в «1» (интерпретируется как осведомительный сигнал). После этого он сбрасывается в «0», а МПА после завершения работы снова переходит в состояние покоя «а1».

Рис.34
Для реализации МПА необходимо по ГСА построить таблицу состояний и переходов автомата (Рис. 35) В ней отмечаются состояния МПА, управляющие сигналы, формируемые в каждом состоянии при наличии определенных значений осведомительных сигналов. Кроме того, в правой колонке таблицы записываются сигналы возбуждения памяти, формируемые по кодам состояния текущего и следующего состояния памяти. Значения сигналов определяются таблицами переключения триггеров, выбранных для построения памяти. В данном случае память реализована на RS-триггерах.
|
Текущее состояние |
Код текущего состояния. |
Управляющие сигналы (вход. набор) |
Осведомительные сигналы (условие) |
Следующее состояние |
Код следующего состояния |
Сигналы возбуждения памяти |
|
а1 |
00 |
y1 - |
В
|
а2 а1 |
01 |
S1 |
|
а2 |
01 |
y1, y3 y2, y3 |
x1
|
а3 |
10 |
R1, S2 |
|
а3 |
10 |
y1, y5 y4 |
x2
|
а4 |
11 |
S1 |
|
а4 |
11 |
y2 |
1 |
а1 |
00 |
R1, R2 |
Рис.35
Таблица позволяет описать логическую организацию схем КС1 и КС2:
Для
КС1: ![]()
![]()
![]()
![]()
![]()
Для
КС2: ![]()
![]()
![]()
![]()
МПА на базе УА с жестким временным распределением сигналов представляет собой наиболее простую структуру, изображенную на Рис. 36а. В ее состав входит распределитель сигналов (РС), комбинационная схема (КС) и управляющий триггер (Тупр.) со схемой «И».

б) а)
Рис.36(а,б)
РС
формирует последовательность импульсов
(рис. 36б) на вход КС, которая обеспечивает
по значениям осведомительных сигналов
генерацию {y}.
В исходном состоянии МПА находится в
состоянии
![]() .
инициализация его производится сигналом
«старт», который устанавливает в «1»
Тупр..
и первый же импульс «СИ» переводит РС
из состояния
.
инициализация его производится сигналом
«старт», который устанавливает в «1»
Тупр..
и первый же импульс «СИ» переводит РС
из состояния
![]() в состояние
в состояние![]() .
Далее по каждому СИ РС переключается
в следующее состояние пока не окажется
в состоянии
.
Далее по каждому СИ РС переключается
в следующее состояние пока не окажется
в состоянии![]() .
В этом состоянииТупр.
должен быть переброшен в «0».
.
В этом состоянииТупр.
должен быть переброшен в «0».

Рис.37
В зависимости от вида ГСА все состояния распределителя сигналов могут быть активными, т.е. в каждом состоянии формируется управляющий сигнал, или некоторые из них пустые.
Реализован
РС может быть как регистр сдвига, в
котором «единица» перемещается по
кольцу от левого разряда (![]() )
к правому (
)
к правому (![]() )
или как композиция двоичного счетчика
с дешифратором на входе.
)
или как композиция двоичного счетчика
с дешифратором на входе.
По своей структуре ГСА можно разделить на 3 группы. К первой группе относятся алгоритмы управления, которые имеют линейные ГСА. Во вторую группу входят ГСА с разветвлениями. Третью группу составляют ГСА с обратными связями.
В линейных ГСА процесс управления распространяется сверху вниз. Могут иметь место ветвления, но в любой ветви присутствует не более одной операторной вершины (рис. 37).
ГСА с ветвлениями могут иметь несколько параллельных ветвей, причем хотя бы в одной из них имеется более одной операторной вершины (рис. 38).
В ГСА с обратными связями процесс управления может развиваться вниз или вверх в зависимости от значений осведомительных сигналов (рис. 39).
Рассмотрим особенности МПА и их работу для ГСА различных типов.
Предположим,
задана линейная
ГСА следующего
вида (рис. 37). Состояние
![]() и
и![]() соответствуют выходу вершины «начало»
и входу вершины «конец». Выходы всех
остальных операторных вершин отмечены
последовательно символами
соответствуют выходу вершины «начало»
и входу вершины «конец». Выходы всех
остальных операторных вершин отмечены
последовательно символами![]() .
Эти отметки соответствуют выходам РС.
.
Эти отметки соответствуют выходам РС.
На
вход комбинационной схемы КС, кроме
выходов с распределителя сигналов,
поступают осведомительные сигналы
![]() и
и![]() .
Логика построения схемы КС по данной
ГСА описывается следующими выражениями:
.
Логика построения схемы КС по данной
ГСА описывается следующими выражениями:

Когда
МПА переходит в состояние
![]() ,
КС формирует сигнал
,
КС формирует сигнал![]() ,
соответствующий вершине «конец» ГСА
и автомат отключается.
,
соответствующий вершине «конец» ГСА
и автомат отключается.
В
данном случае все такты работы РС
являются рабочими независимо от значений
![]() и
и![]() .
.
В
ГСА с
ветвлениями
(рис. 38) отмечается символами
![]() самая длинная ветвь, которая и будет
определять количество выходов РС. В
более коротких ветвях некоторые
состояния будут холостыми. Например,
в средней ветви ГСА после вершины с
самая длинная ветвь, которая и будет
определять количество выходов РС. В
более коротких ветвях некоторые
состояния будут холостыми. Например,
в средней ветви ГСА после вершины с![]() можно поставить отметку «
можно поставить отметку «![]() »,
«
»,
«![]() »
или «
»
или «![]() »,
но только одно из состояний РС будет
рабочим, если управление распространяется
по этой ветви.
»,
но только одно из состояний РС будет
рабочим, если управление распространяется
по этой ветви.
В
правой ветви холостыми будут такты,
определяемые состояниями
![]() ,
,![]() или
или![]() .
.
Логика построения схемы КС описывается следующими выражениями:



Рис. 38
При наличии ГСА с обратными связями (рис. 39) микропрограммный автомат представляется как последовательность МПА1, МПА2 и МПА3, каждый из которых реализует участок линейной ГСА. Отличия в отметках ГСА данного типа будут заключаться лишь в том, что выходы условных вершин, в которых имеет место обратная связь, тоже отмечаются. Это необходимо для организации передачи управления от одного автомата к другому.
Если
![]() ,
функции управления передаются МПА3,
в противном случае вновь продолжает
работу МПА2.
,
функции управления передаются МПА3,
в противном случае вновь продолжает
работу МПА2.
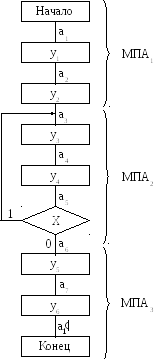
Рис. 39
Из рассмотренных материалов видно, что по структурной организации МПА с жестким временным распределением сигналов достаточно просты, но могут иметь потери в быстродействии из-за наличия холостых тактов. Такие потери неизбежны.
Количество
состояний РС можно сделать регулируемым
для ГСА различной длины путем введения
в состав РС дополнительной схемы,
которая для более коротких ГСА переводила
бы РС из состояния
![]() в состояние
в состояние![]() .
.