

2. Организация устройства управления.
2.1. Назначение устройства управления.
Устройство управления (УУ) является наиболее важным устройством ЭВМ [л 3, л 4, л 7, л 8, л 9]. Оно обеспечивает автоматическое выполнение команд программы как последовательность циклов исполнения команд. На цикле исполнения команды УУ выполняет следующие функции:
организует выборку команды;
дешифрирует код операции;
формирует адреса обращения к памяти для выборки операндов и размещению результата;
формирует адреса переходов;
осуществляет выборку и пересылку операндов;
управляет выполнением операции, записанной в КОП команды;
формирует на программном счетчике адрес следующей команды программы.
В состав УУ входит система управляющих регистров, наиболее важными из которых являются программный счетчик и регистр команд, и микропрограммный автомат (МПА). При выполнении любой команды МПА вырабатывает последовательность управляющих сигналов, обеспечивающих реализацию функции исполняемой команды. При этом по каждому управляющему сигналу в обрабатывающем блоке или блоке памяти выполняется определенная микрооперация.
2.2. Способы организации уу.
Устройства управления можно классифицировать по способам организации и по применяемым микропрограммным автоматам.
В УУ централизованного типа все функции по формированию управляющих сигналов сосредоточены в едином блоке управления, из которого сигналы управления поступают во все исполнительные устройства.
В УУ децентрализованного типа функции формирования управляющих сигналов распределяются между различными блоками управления, которые в процессе исполнения команды определенным образом взаимодействуют между собой. Конкретное взаимодействие между блоками и их состав определяются конфигурацией процессора.
Для формирования управляющих сигналов могут применяться МПА как с жесткой, так и с программируемой логикой. В составе УУ смешанного типа на одних этапах выполнения команды за формирование управляющих сигналов могут отвечать МПА с жесткой логикой, на других – МПА с программируемой логикой.
Структура УУ централизованного типа представлена на рис.28.

Рис. 28
УУ на цикле исполнения каждой команды формирует в ОЗУ и АЛУ соответствующий набор управляющих сигналов и принимает от них осведомительные сигналы, т.е. выполняет все функции, перечисленные в разделе 2.1. Кроме того, УУ генерирует управляющие сигналы для выполнения процедур на управляющих регистрах. На рис.26 сплошными линиями показаны направления перемещения информации между устройствами, а пунктирными – управляющие и осведомительные сигналы.
УУ децентрализованного типа можно представить в различных вариантах, один из которых показан на рис.29. Будем исходить из того, что вычислитель процессора имеет блочную структуру и каждый блок ориентирован на выполнение конкретной операции или ее части. В этом случае УУ представляется композицией микропрограммных автоматов (МПА1, МПА2, …, МПАк) и центрального блока (ЦБ). Можно дать этой схеме, по крайней мере, две интерпретации по распределению функций между блоками УУ.
Интерпретация первая.
ЦБ берет на себя выполнение следующих процедур:
формирование адреса команды;
выборку команды;
расшифровку кода операции;
формирование адресов обращения к памяти;
выборка, и загрузку операндов, запись результатов;
формирование стартового сигнала для включения соответствующего МПА.
Микропрограммные автоматы выполняют задачу формирования последовательности управляющих сигналов в соответствующий исполнительный блок – операционный автомат(ОА). ЦБ и МПА связаны между собой асинхронными связями и взаимодействуют по системе «приказ- ответ».
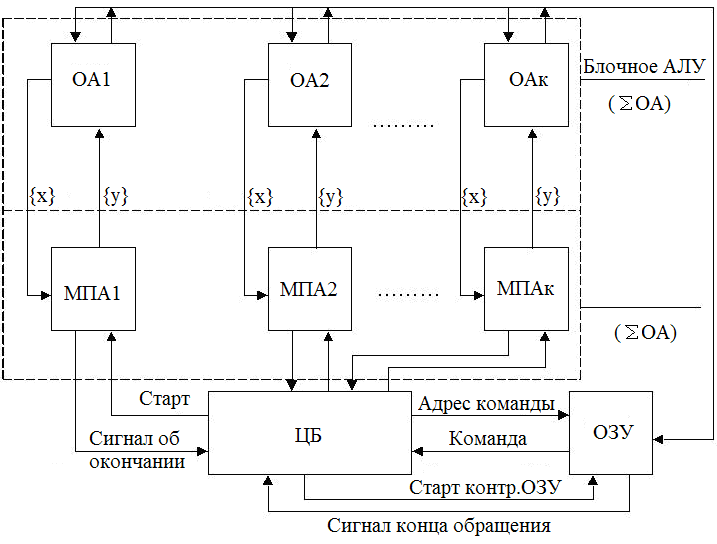
Рис.29
В качестве примера взаимодействия ЦБ и МПА рассмотрим их работу на цикле исполнения 3-х адресной команды арифметической операции. Структура цикла показана на рис.30.
ЦБ по содержимому программного счетчика выбирает команду(Тк), дешифрирует код операций(ДС КОП), формирует адреса обращения за 1-м и 2-м операндами и пересылает их в соответствующий ОА (ТА1 ,ТА2 ). Затем микропрограммный автомат центрального блока вырабатывает сигнал «Старт», который инициирует начало работы одного из МПА. В дальнейшем, все управляющие сигналы для обработки данных в ОА формирует МПА. По завершению работы он информирует центральный блок сигналом об окончании своей работы. Далее ЦБ завершает цикл исполнения команды путем формирования адреса результата и записи результата в память.
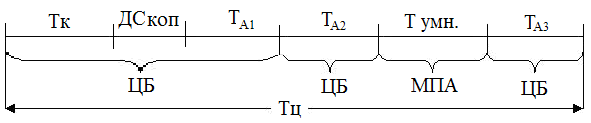
Рис.30
Где Тк – Время выборки команды
ТА1– Время формирования адреса А1 и выборки 1-го операнда
ТА2– Время формирования адреса А2 и выборки 2-го операнда
Тц – Время цикла.
Интерпретация вторая.
ЦБ только выбирает команду, дешифрует КОП и отсылает ее в блок управления соответствующим исполнительным устройством. В этом случае МПА, показанные на рис.29, расширяют свои функции до уровня местных УУ, т.е. устройств управления, реализующих только одну команду. Допустим, что данный ОА предназначен для перемножения чисел. Местное УУ этого ОА принимает из ЦБ команду, само выполняет все запросы операндов, руководит перемножением операндов и размещает результат в памяти. После завершения работы сигналом об окончании информирует ЦБ.
Во время работы блока умножения арифметико-логического устройства центральный блок может сформировать адрес следующей команды, выбрать ее и передать в другой блок. Это позволяет загрузить работой параллельно ряд исполнительных блоков. Похожая идея используется в WLIV– ВС, в которых одновременно осуществляется выборка группы команд, содержащих различные КОП, и параллельно этими командами загружается группа исполнительных устройств.
Децентрализованное управление при конвейерной обработке.
Любой конвейер представляет собой совокупность ступеней, последовательно связанных между собой, как по обработке данных, так и по формированию управляющих сигналов, причем каждая ступень представляет собой ОУ, реализующее только одну подфункцию (рис.31).
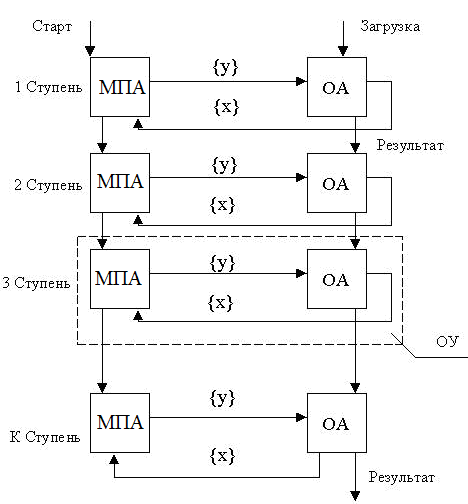
Рис.31
Процедуры, связанные с вычислением подфункции, выполняются в ОА ступени. Управление работой ступени осуществляет его микропрограммный автомат. Когда ступень вычислила подфункцию, результат по сигналу МПА передается на вход следующей ступени, а сам МПА инициирует работу МПА следующей ступени.
В асинхронных конвейерах на ОА возлагаются достаточно сложные функции обработки данных. По этой причине и МПА должны реализовывать сложные графы управления. Каждая ступень конвейера представляет собой самостоятельное операционное устройства(ОУ).
В синхронных конвейерах взаимодействие между ступенями по управлению происходит аналогично выше рассмотренному. Разница заключается лишь в том, что МПА вырождаются в простые схемы, которые обеспечивают синхронизацию передач между фиксаторами и выдачу управляющих сигналов для выполнения в «логике» ступени элементарных процедур.
Организация УУ с точки зрения применяемых микропрограммных автоматов представлена на рис. 32.

Рис.32
Управляющие сигналы могут полностью формироваться МПА с жесткой логикой на всем цикле команды. Эти сигналы формируются логическими схемами в соответствии с «запаяным» алгоритмом управления. Такие автоматы еще принято называть МПА с запаянной логикой. Они не могу изменять своих функций. Это нашло отражение в наименовании МПА данного типа. Они строятся на базе автоматов МИЛИ – МУРА (или по терминологии [л 8] автоматов с памятью) и на базе жесткого временного распределения сигналов (ЖВРС). В МПА с программируемой логикой сигналы управления хранятся в управляющей памяти в виде последовательности микрокоманд (микропрограммы), в каждой из которых записана группа сигналов {y}, формируемая в данном такте работы процессора. Такого вида МПА различают по применяемым способам микропрограммирования (кодирования) микрокоманд и по организации перехода к следующей микрокоманде. Первое относится к форме представления управляющих сигналов в микрокоманде. Второе определяется форматом микрокоманд, обеспечивающих переходы в микропрограммах. От МПА с жесткой логикой их отличает возможность изменения алгоритмов управления путем замены в управляющей памяти старой микропрограммы на новую.